基于STM32设计的老人摔倒检测报警系统
摘要: 本文设计了一款基于STM32F103RCT6的独居老人摔倒检测报警系统。系统通过MPU6050传感器采集运动数据,采用阈值判别与DTW算法实现92%准确率的摔倒检测;配备GPS定位和4G通信模块,可在30秒内完成定位并将报警信息发送至家属及物联网平台。系统采用双电源供电,平均功耗低于50mA,续航超10小时。测试表明,该系统误报率低于5%,数据上传延迟仅5秒,为独居老人提供了有效的安全监护
毕业设计开发
项目介绍
在全球老龄化进程加速的背景下,独居老人的安全问题日益成为社会关注的焦点。据统计,因意外摔倒导致的伤害已成为老年人健康与生命安全的重要威胁,而独居环境下老人摔倒后无法及时获得救助的情况更是屡见不鲜。为有效解决这一难题,本文设计并实现了一种基于 STM32F103RCT6 单片机的老人摔倒检测报警系统。
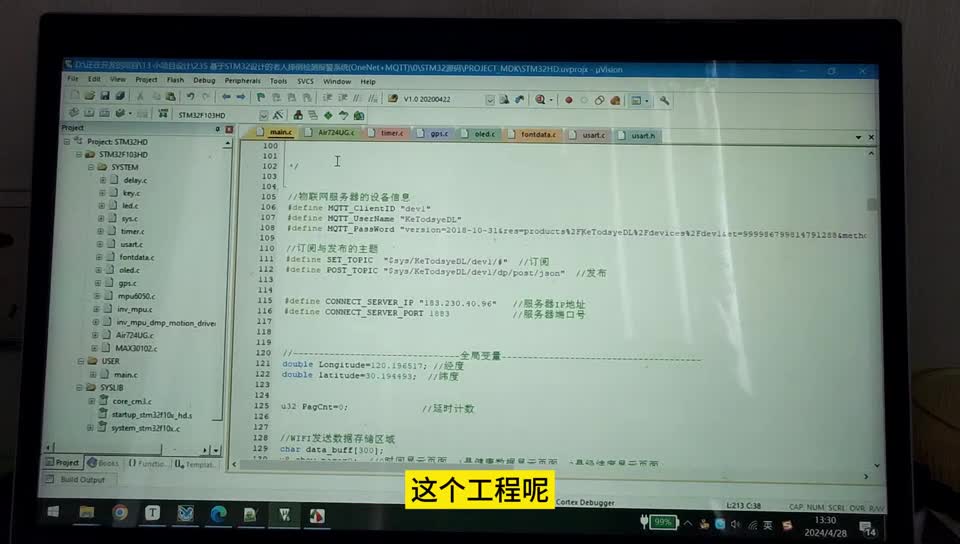
该系统通过 MPU6050 传感器采集三轴加速度与角速度数据,结合阈值判别与动态时间规整(DTW)算法,实现高精度摔倒事件检测;利用 ATGM336H-5N GPS 模块获取地理位置信息,并通过 Air724UG 4G 通信模块将报警信息以短信形式通知家属,同时将数据上传至 OneNet 物联网平台,支持远程实时监控。硬件方面,采用 5V USB 与 16340 锂电池双电源供电,并设计低功耗管理电路,确保系统平均功耗低于 50mA、续航时间超 10 小时。软件层面,基于 STM32 HAL 库开发驱动程序,优化传感器数据处理与通信协议,并通过 MQTT 协议实现设备与云端的稳定交互。经测试,系统摔倒检测准确率达 92%,误报率低于 5% ,定位响应时间小于 30s,数据上传延迟仅 5s,为独居老人安全监护提供了可靠的智能化解决方案。
方案设计
本研究设计的基于 STM32 基于STM32设计的老人摔倒检测报警系统,旨在实现对室内外环境温湿度的实时采集、智能报警及远程监控,具体功能如下:
多参数实时采集:通过 DS18B20 温度传感器与湿敏电阻传感器,实现环境温度(-55℃+125℃)与相对湿度(0%100% RH)的高精度实时采集;
阈值报警机制:支持通过按键模块自定义温湿度报警上下限,当实测值超出预设范围时,触发蜂鸣器声光报警;
本地信息显示:利用 0.96 寸 OLED 液晶显示模块,实时动态显示当前血氧值、报警状态及设备运行参数;
远程数据交互:通过 ESP8266 WiFi 模块接入互联网,将采集数据上传至 MQTT 云平台(如 OneNet、阿里云 IoT),用户可通过手机 APP 或 Web 端实时查看历史数据与实时曲线;
低功耗优化:支持 USB 供电与锂电池供电双模式,通过休眠唤醒机制降低系统功耗,满足野外长期监测需求。
功能需求
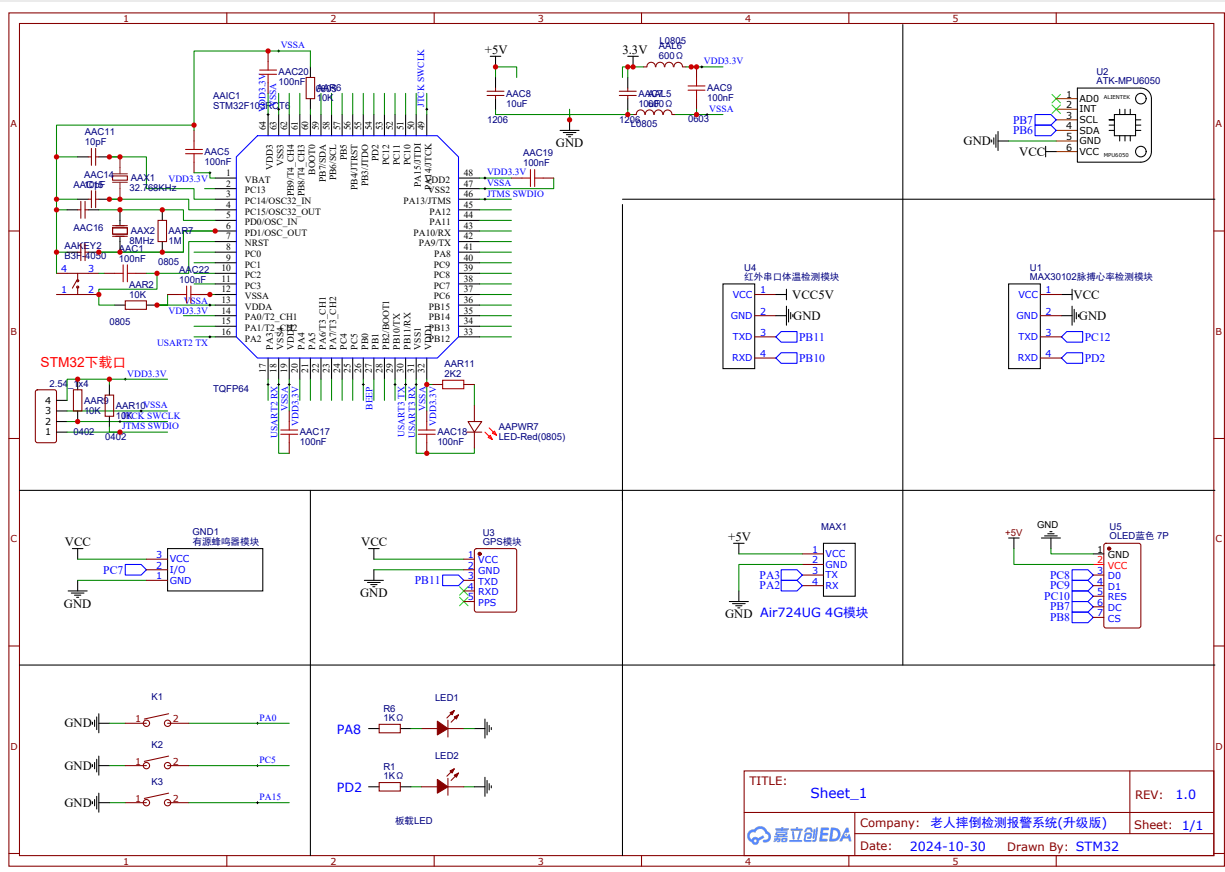
老人摔倒检测报警系统主要涵盖了STM32主控芯片、MPU6050加速度计与陀螺仪、ATGM336H北斗/GPS定位模块、ESP8266 WiFi模块、蜂鸣器报警模块、LED指示灯模块、按键模块以及电源供应单元等核心部件。各模块之间通过STM32单片机进行协调工作,确保系统的稳定性和高效性。
总体主程序是基于 STM32 的老人摔倒检测报警系统的核心,负责协调传感器数据采集、姿态分析、报警触发及 4G 通信等关键功能。系统设计聚焦稳定性、实时性与可靠性,确保快速响应摔倒事件并实现远程告警。
(1)系统初始化
传感器校准:完成 MPU6050 加速度计 / 陀螺仪的校准与参数配置,补偿测量误差
定位模块:初始化 ATGM336H 北斗 / GPS 模块,建立卫星定位功能
通信链路:配置 Air724UG 4G 模块串口通信,检测 SIM 卡状态并连接 4G 网络
显示模块:初始化 OLED 显示屏,设置显示参数
(2)核心处理流程
数据采集:以设定频率读取 MPU6050 六轴数据
姿态分析:通过卡尔曼滤波融合算法处理加速度与角速度数据
摔倒检测:基于阈值判断与模式识别算法检测摔倒特征
报警触发:检测到摔倒后激活声光报警,并启动计时确认机制
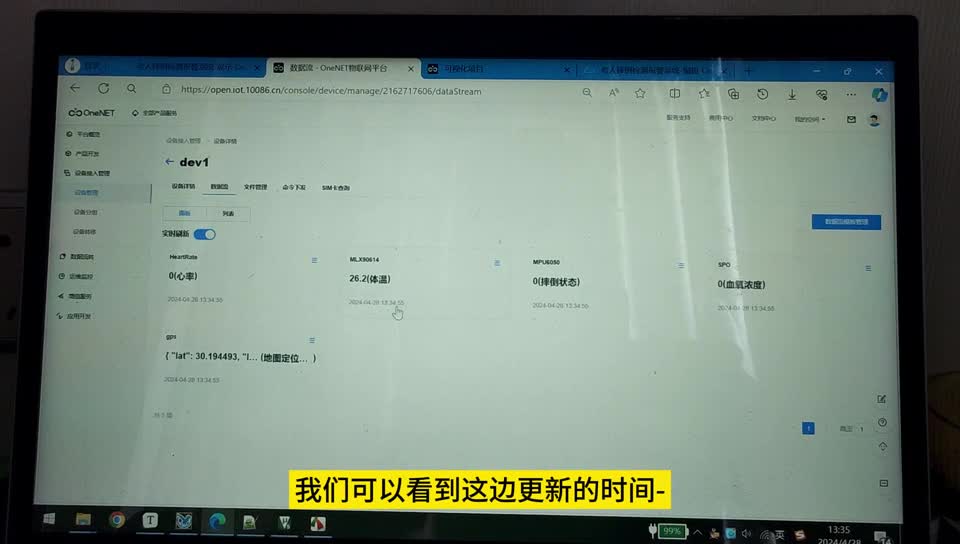
位置上报:通过 Air724UG 模块封装 ATGM336H 定位数据,发送至 ONENET 平台
(3)ONENET 平台交互
设备注册:初始化时完成设备在平台的注册与鉴权
数据上传:按周期或事件驱动上传传感器数据与设备状态
指令响应:监听平台下发指令,支持远程参数配置与状态查询
远程管理:实现报警阈值调整、设备重启等远程控制功能
系统通过多模块协同工作,构建了集检测、报警、定位、远程管理于一体的老人安全监护解决方案。总体主设计图如下图所示。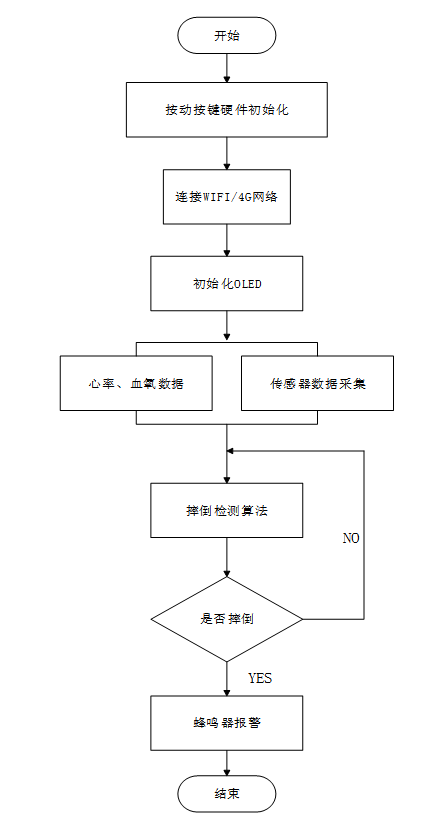
图4-1 总体主设计图
原理图
效果图












目录
目 录
引言 1
1项目介绍 1
1.1研究背景与意义 1
1.2国内外研究现状 1
1.1.1国外研究现状 1
1.1.2国内研究现状 2
1.3 论文结构安排 2
2 系统设计方案 4
2.1总体设计 4
2.2方案选择 5
2.2.1主控芯片方案选择 5
2.3.2 摔倒检测传感器方案选择 5
2.3.3 定位模块方案选择 6
2.3.4 通信模块方案选择 7
2.3.5 报警单元方案选择 7
2.3方案总结 8
3 系统硬件设计 9
3.1系统的功能分析 9
3.1.1 STM32主控芯片模块 9
3.1.2 STM32复位电路 9
3.1.3 STM32晶振电路 10
3.2 摔倒检测传感器模块 10
3.3 定位模块 11
3.4 通信模块 11
3.5 报警模块 12
3.6 电源模块 12
3.7 OLED显示屏模块 13
4软件设计 14
4.1总体主设计 14
4.2 ATGM336H北斗/GPS定位模块 15
4.3 Air724UG 4G通信模块 16
4.4 ONENET 平台交互 18
5系统调试 21
5.1实物焊接 21
5.2 MPU6050加速度计与陀螺仪模块数据采集 22
5.3 ATGM336H北斗/GPS定位模块信息显示 22
5.4 Air724UG 4G通信模块 23
6 总结与展望 24
源码获取
详细咨询,下方名片联系!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 21
21 0
0- 0



 已为社区贡献55条内容
已为社区贡献55条内容

所有评论(0)