STM32项目之直流有刷电机转速闭环控制
L298N:如下图中,L298N为双路驱动,我们只用到左侧,三接线端子分别接->供电、GND(需要与单片机共地)、3.3V供电(给单片机),通道A使能口接PWM控制的PB0,左侧的两个逻辑输入接PA6和PA7。本项目用到的原件:直流有刷电机(带测速编码器)、电机驱动(TB6612或L298N)、STM32最小系统板、OLED、蓝牙模块、直流电源(7~12V)直流加粗样式有刷电机:供电口接L298N
·
功能:通过手机蓝牙软件,实现电机闭环加减速、控制参数调整
一、硬件选型及连接
本项目用到的原件:直流有刷电机(带测速编码器)、电机驱动(TB6612或L298N)、STM32最小系统板、OLED、蓝牙模块、直流电源(7~12V)
直流加粗样式有刷电机:供电口接L298N输出,编码器接口->PB6、PB7
L298N:如下图中,L298N为双路驱动,我们只用到左侧,三接线端子分别接->供电、GND(需要与单片机共地)、3.3V供电(给单片机),通道A使能口接PWM控制的PB0,左侧的两个逻辑输入接PA6和PA7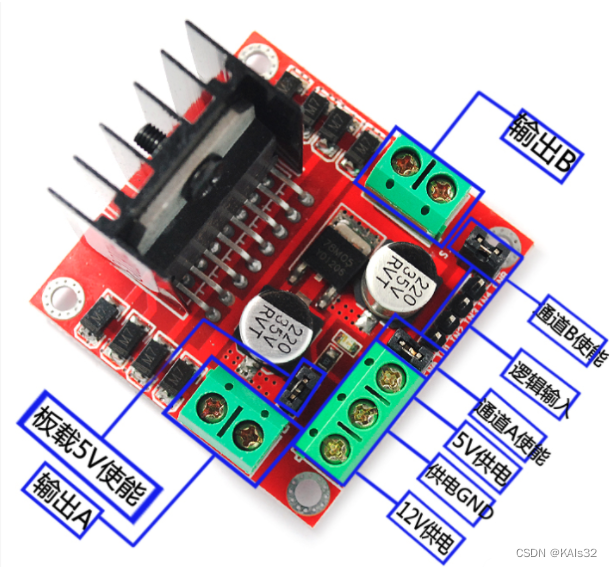
OLED:SCL->PB8、SDA->PB9
二、各模块实现
1.PWM
#include "stm32f10x.h"
void PWM_Init(void)
{
// 1. GPIO初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 2. 定时器初始化
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100-1; // ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1; // 72MHz/720 = 100kHz
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
// 3. 输出比较配置
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 50; // 初始占空比50%
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
// 4. 使能定时器
TIM_Cmd(TIM3, ENABLE);
// 5. 特别重要:对于高级定时器TIM1,需要使能主输出
// TIM_CtrlPWMOutputs(TIM1, ENABLE);
}
void PWM_SetCompare(uint16_t Compare)
{
TIM_SetCompare3(TIM3, Compare);
}
2.电机逻辑状态
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Moter_Init(void)
{
PWM_Init();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA ,&GPIO_InitStructure);
}
void Moter_SetSpeed(int8_t Speed)
{
if(Speed >= 0)
{
GPIO_SetBits(GPIOA,GPIO_Pin_6);
GPIO_ResetBits(GPIOA,GPIO_Pin_7);
PWM_SetCompare(Speed);
}
else
{
GPIO_SetBits(GPIOA,GPIO_Pin_7);
GPIO_ResetBits(GPIOA,GPIO_Pin_6);
PWM_SetCompare(-Speed);
}
}
3.测速编码器
#include "stm32f10x.h" // Device header
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设定为复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7 ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//2.TIM初始化
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);
//(1)PWM频率:Freq = CK_PSC / (PSC +1) / (ARR +1)
//(2)PWM占空比:Duty=CCR/(ARR+1)
//(3)PWM分辨率:Reso=1/(ARR+1)
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //用于采样电路的分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//定时器计数方式:上、下、中央对其
TIM_TimeBaseInitStructure.TIM_Period = 65536-1;//ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 1-1;//PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器,只在高级计数器中使用
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStructure);
//3.初始化输入捕获单元
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;//通道一
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM4,&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;//通道二
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIM4,&TIM_ICInitStructure);
TIM_EncoderInterfaceConfig(TIM4,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising );
TIM_Cmd(TIM4,ENABLE);
}
int16_t Get_Encoder(void)
{
int16_t Temp;
Temp = TIM_GetCounter(TIM4);
TIM_SetCounter(TIM4,0);
return Temp;
}
4.蓝牙
只用到接收功能,这里都进行了配置
#include "stm32f10x.h" // Device header
void Serial_Init(void)
{
//1.开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//2.GPIO初始化:TX(A9)->复用输出;RX(A10)->输入
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA ,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA ,&GPIO_InitStructure);
//3.配置USART
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1,ENABLE);
}
5.PI算法定时器中断
#include "stm32f10x.h" // Device header
void Timer_Init(void)
{
//TIM初始化
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //用于采样电路的分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;//定时器计数方式:上、下、中央对其
TIM_TimeBaseInitStructure.TIM_Period = 10000-1;//ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1;//PSC 计时=(ARR-1)*(PSC-1)/主频=1S
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;//重复计数器,只在高级计数器中使用
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_ClearFlag(TIM2,TIM_FLAG_Update);//手动清除中断标志位,避免一开始就进入中断的问题
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
//NVIC初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM2, ENABLE);
}
6.OLED
#include "stm32f10x.h"
#include "OLED_Font.h"
/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_8, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_9, (BitAction)(x))
/*引脚初始化*/
void OLED_I2C_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_Init(GPIOB, &GPIO_InitStructure);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C开始
* @param 无
* @retval 无
*/
void OLED_I2C_Start(void)
{
OLED_W_SDA(1);
OLED_W_SCL(1);
OLED_W_SDA(0);
OLED_W_SCL(0);
}
/**
* @brief I2C停止
* @param 无
* @retval 无
*/
void OLED_I2C_Stop(void)
{
OLED_W_SDA(0);
OLED_W_SCL(1);
OLED_W_SDA(1);
}
/**
* @brief I2C发送一个字节
* @param Byte 要发送的一个字节
* @retval 无
*/
void OLED_I2C_SendByte(uint8_t Byte)
{
uint8_t i;
for (i = 0; i < 8; i++)
{
OLED_W_SDA(Byte & (0x80 >> i));
OLED_W_SCL(1);
OLED_W_SCL(0);
}
OLED_W_SCL(1); //额外的一个时钟,不处理应答信号
OLED_W_SCL(0);
}
/**
* @brief OLED写命令
* @param Command 要写入的命令
* @retval 无
*/
void OLED_WriteCommand(uint8_t Command)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x00); //写命令
OLED_I2C_SendByte(Command);
OLED_I2C_Stop();
}
/**
* @brief OLED写数据
* @param Data 要写入的数据
* @retval 无
*/
void OLED_WriteData(uint8_t Data)
{
OLED_I2C_Start();
OLED_I2C_SendByte(0x78); //从机地址
OLED_I2C_SendByte(0x40); //写数据
OLED_I2C_SendByte(Data);
OLED_I2C_Stop();
}
/**
* @brief OLED设置光标位置
* @param Y 以左上角为原点,向下方向的坐标,范围:0~7
* @param X 以左上角为原点,向右方向的坐标,范围:0~127
* @retval 无
*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{
OLED_WriteCommand(0xB0 | Y); //设置Y位置
OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位
OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}
/**
* @brief OLED清屏
* @param 无
* @retval 无
*/
void OLED_Clear(void)
{
uint8_t i, j;
for (j = 0; j < 8; j++)
{
OLED_SetCursor(j, 0);
for(i = 0; i < 128; i++)
{
OLED_WriteData(0x00);
}
}
}
/**
* @brief OLED显示一个字符
* @param Line 行位置,范围:1~4
* @param Column 列位置,范围:1~16
* @param Char 要显示的一个字符,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{
uint8_t i;
OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容
}
OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分
for (i = 0; i < 8; i++)
{
OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容
}
}
/**
* @brief OLED显示字符串
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param String 要显示的字符串,范围:ASCII可见字符
* @retval 无
*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i++)
{
OLED_ShowChar(Line, Column + i, String[i]);
}
}
/**
* @brief OLED次方函数
* @retval 返回值等于X的Y次方
*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y--)
{
Result *= X;
}
return Result;
}
/**
* @brief OLED显示数字(十进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~4294967295
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十进制,带符号数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:-2147483648~2147483647
* @param Length 要显示数字的长度,范围:1~10
* @retval 无
*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{
uint8_t i;
uint32_t Number1;
if (Number >= 0)
{
OLED_ShowChar(Line, Column, '+');
Number1 = Number;
}
else
{
OLED_ShowChar(Line, Column, '-');
Number1 = -Number;
}
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');
}
}
/**
* @brief OLED显示数字(十六进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~0xFFFFFFFF
* @param Length 要显示数字的长度,范围:1~8
* @retval 无
*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i, SingleNumber;
for (i = 0; i < Length; i++)
{
SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;
if (SingleNumber < 10)
{
OLED_ShowChar(Line, Column + i, SingleNumber + '0');
}
else
{
OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');
}
}
}
/**
* @brief OLED显示数字(二进制,正数)
* @param Line 起始行位置,范围:1~4
* @param Column 起始列位置,范围:1~16
* @param Number 要显示的数字,范围:0~1111 1111 1111 1111
* @param Length 要显示数字的长度,范围:1~16
* @retval 无
*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i++)
{
OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');
}
}
/**
* @brief OLED初始化
* @param 无
* @retval 无
*/
void OLED_Init(void)
{
uint32_t i, j;
for (i = 0; i < 1000; i++) //上电延时
{
for (j = 0; j < 1000; j++);
}
OLED_I2C_Init(); //端口初始化
OLED_WriteCommand(0xAE); //关闭显示
OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率
OLED_WriteCommand(0x80);
OLED_WriteCommand(0xA8); //设置多路复用率
OLED_WriteCommand(0x3F);
OLED_WriteCommand(0xD3); //设置显示偏移
OLED_WriteCommand(0x00);
OLED_WriteCommand(0x40); //设置显示开始行
OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置
OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置
OLED_WriteCommand(0xDA); //设置COM引脚硬件配置
OLED_WriteCommand(0x12);
OLED_WriteCommand(0x81); //设置对比度控制
OLED_WriteCommand(0xCF);
OLED_WriteCommand(0xD9); //设置预充电周期
OLED_WriteCommand(0xF1);
OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别
OLED_WriteCommand(0x30);
OLED_WriteCommand(0xA4); //设置整个显示打开/关闭
OLED_WriteCommand(0xA6); //设置正常/倒转显示
OLED_WriteCommand(0x8D); //设置充电泵
OLED_WriteCommand(0x14);
OLED_WriteCommand(0xAF); //开启显示
OLED_Clear(); //OLED清屏
}
7.主函数
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "Delay.h"
#include "Timer.h"
#include "Encoder.h"
#include "Moter.h"
#include "Serial.h"
//参数定义
uint8_t RxData; //接收数据
int16_t Speed; //检测的速度
float Kp = 0.07; //PI参数
float Ki = 0.1;
float ek; //误差
int16_t Demand=0; //给定转速
float Integral; //积分累加值
int8_t PWM;
float Integral_max = 1000; // 积分限幅
int main(void)
{
Encoder_Init();
Timer_Init();
OLED_Init();
Moter_Init();
Serial_Init();
Moter_SetSpeed(0);
OLED_ShowString(1,1,"Speed:");
OLED_ShowString(2,1,"Demand:");
OLED_ShowString(3,1,"Kp:0.");
OLED_ShowString(4,1,"Ki:0.");
while(1)
{
OLED_ShowSignedNum(1,7,Speed,5);//编码器测量位置
OLED_ShowSignedNum(2,7,Demand,5);
OLED_ShowNum(3,6,Kp*100,2);
OLED_ShowNum(4,6,Ki*100,2);
if(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) == SET) //验证是否收到蓝牙数据
{
RxData = USART_ReceiveData(USART1);
OLED_ShowHexNum(4,10,RxData,2);
}
//设定理想转速
if(RxData == 1)
{
Demand = Demand + 10;
Delay_ms(20);
RxData = 7;
}
if(RxData == 2)
{
Demand = Demand - 10;
Delay_ms(20);
RxData = 7;
}
//设定控制参数Kp
if(RxData == 3)
{
Kp = Kp + 0.01;
Delay_ms(20);
RxData = 7;
}
if(RxData == 4)
{
Kp = Kp - 0.01;
Delay_ms(20);
RxData = 7;
}
//设定控制参数Ki
if(RxData == 5)
{
Ki = Ki + 0.01;
Delay_ms(20);
RxData = 7;
}
if(RxData == 6)
{
Ki = Ki - 0.01;
Delay_ms(20);
RxData = 7;
}
}
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update)==SET)
{
//测速
Speed = 60*10*Get_Encoder()/(21.3*11*4);
//PI算法闭环
ek = Demand - Speed;
// 积分项累加,并做限幅防止积分饱和
Integral = ek + Integral;
if(Integral > Integral_max) Integral = Integral_max;
if(Integral < -Integral_max) Integral = -Integral_max;
PWM = Kp*ek + Ki*Integral;
if(PWM > 100)
{
PWM = 100;
}
if(PWM < -100)
{
PWM = -100;
}
Moter_SetSpeed(PWM);
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
}

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 12
12 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)