基于STM32数字电压表设计
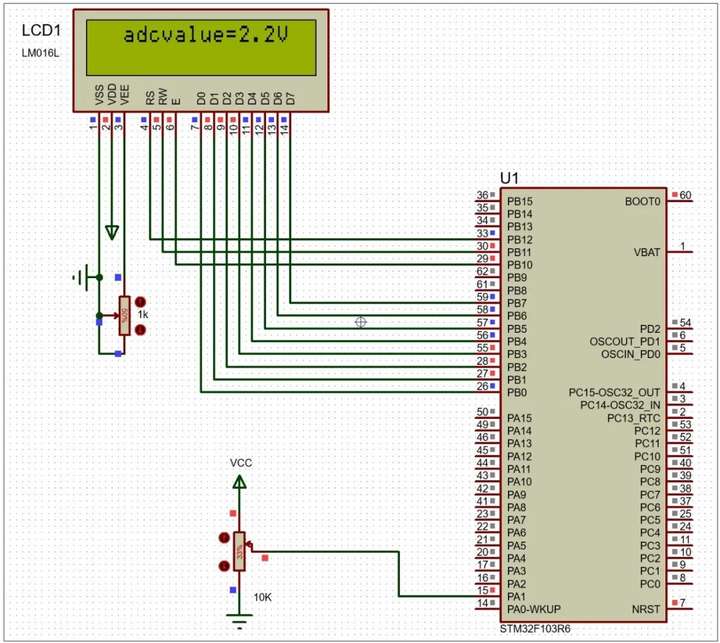
具体功能:1.滑动变阻器接电源输入电压;2.单片机处理数据后控制LCD1602显示;3.可测量0-3.3V;
·
基于STM32数字电压表
(仿真+程序+设计报告)
功能介绍
具体功能:
1.滑动变阻器接电源输入电压;
2.单片机处理数据后控制LCD1602显示;
3.可测量0-3.3V;
添加图片注释,不超过 140 字(可选)
程序
#include "stm32f10x.h"
#include "bsp-lcd1602.h"
#include "delay.h"
#include "sys.h"
#include "adc.h"
int main(void)
{
int a,b,c,d;
float temp;
delay_init(); //延时函数初始化
LCD1602_Init(); //LCD1602显示初始化
ADC1_GPIO_Config(); //ADC引脚初始化
ADC_Config(); //ADC使能
LCD1602_ShowStr(2,0,"adcvalue=0.0V",13);//LCD1602显示
while(1)
{
b=ADC_GetConversionValue(ADC1);//得到ADC值
temp=(float)b*(3.4/4096);
//实际电压 = (ADC_DR)/分辨率 *(正参考电压-负参考电压)
//正参考电压3.3V才对,但是做仿真需要改3.4V才准
a=temp/1;
c=temp*10;
d=c%10;
LCD_ShowNum(11,0,a);//显示个位
LCD_ShowNum(13,0,d);//显示小数点后一位
}
}
#include "sys.h"
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//********************************************************************************
//THUMB指令不支持汇编内联
//采用如下方法实现执行汇编指令WFI
void WFI_SET(void)
{
__ASM volatile("wfi");
}
//关闭所有中断
void INTX_DISABLE(void)
{
__ASM volatile("cpsid i");
}
//开启所有中断
void INTX_ENABLE(void)
{
__ASM volatile("cpsie i");
}
//设置栈顶地址
//addr:栈顶地址
__asm void MSR_MSP(u32 addr)
{
MSR MSP, r0 //set Main Stack value
BX r14
}
/**
******************************************************************************
* @file system_stm32f10x.h
* @author MCD Application Team
* @version V3.5.0
* @date 11-March-2011
* @brief CMSIS Cortex-M3 Device Peripheral Access Layer System Header File.
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
*********//完整资料
*********//微信公众号:木子单片机
/** @addtogroup CMSIS
* @{
*/
/** @addtogroup stm32f10x_system
* @{
*/
/**
* @brief Define to prevent recursive inclusion
*/
#ifndef __SYSTEM_STM32F10X_H
#define __SYSTEM_STM32F10X_H
#ifdef __cplusplus
extern "C" {
#endif
/** @addtogroup STM32F10x_System_Includes
* @{
*/
/**
* @}
*/
/** @addtogroup STM32F10x_System_Exported_types
* @{
*/
extern uint32_t SystemCoreClock; /*!< System Clock Frequency (Core Clock) */
/**
* @}
*/
/** @addtogroup STM32F10x_System_Exported_Constants
* @{
*/
/**
* @}
*/
/** @addtogroup STM32F10x_System_Exported_Macros
* @{
*/
/**
* @}
*/
/** @addtogroup STM32F10x_System_Exported_Functions
* @{
*/
extern void SystemInit(void);
extern void SystemCoreClockUpdate(void);
/**
* @}
*/
#ifdef __cplusplus
}
#endif
#endif /*__SYSTEM_STM32F10X_H */
/**
* @}
*/
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
#include "delay.h"
//////////////////////////////////////////////////////////////////////////////////
//如果需要使用OS,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //ucos 使用
#endif
//////////////////////////////////////////////////////////////////////////////////
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//********************************************************************************
//V1.2修改说明
//修正了中断中调用出现死循环的错误
//防止延时不准确,采用do while结构!
//V1.3修改说明
//增加了对UCOSII延时的支持.
//如果使用ucosII,delay_init会自动设置SYSTICK的值,使之与ucos的TICKS_PER_SEC对应.
//delay_ms和delay_us也进行了针对ucos的改造.
//delay_us可以在ucos下使用,而且准确度很高,更重要的是没有占用额外的定时器.
//delay_ms在ucos下,可以当成OSTimeDly来用,在未启动ucos时,它采用delay_us实现,从而准确延时
//可以用来初始化外设,在启动了ucos之后delay_ms根据延时的长短,选择OSTimeDly实现或者delay_us实现.
//V1.4修改说明 20110929
//修改了使用ucos,但是ucos未启动的时候,delay_ms中中断无法响应的bug.
//V1.5修改说明 20120902
//在delay_us加入ucos上锁,防止由于ucos打断delay_us的执行,可能导致的延时不准。
//V1.6修改说明 20150109
//在delay_ms加入OSLockNesting判断。
//V1.7修改说明 20150319
//修改OS支持方式,以支持任意OS(不限于UCOSII和UCOSIII,理论上任意OS都可以支持)
//添加:delay_osrunning/delay_ostickspersec/delay_osintnesting三个宏定义
//添加:delay_osschedlock/delay_osschedunlock/delay_ostimedly三个函数
//V1.8修改说明 20150519
//修正UCOSIII支持时的2个bug:
//delay_tickspersec改为:delay_ostickspersec
//delay_intnesting改为:delay_osintnesting
//////////////////////////////////////////////////////////////////////////////////
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数,在ucos下,代表每个节拍的ms数
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS定义了,说明要支持OS了(不限于UCOS).
//当delay_us/delay_ms需要支持OS的时候需要三个与OS相关的宏定义和函数来支持
//首先是3个宏定义:
// delay_osrunning:用于表示OS当前是否正在运行,以决定是否可以使用相关函数
//delay_ostickspersec:用于表示OS设定的时钟节拍,delay_init将根据这个参数来初始哈systick
// delay_osintnesting:用于表示OS中断嵌套级别,因为中断里面不可以调度,delay_ms使用该参数来决定如何运行
//然后是3个函数:
// delay_osschedlock:用于锁定OS任务调度,禁止调度
//delay_osschedunlock:用于解锁OS任务调度,重新开启调度
// delay_ostimedly:用于OS延时,可以引起任务调度.
//本例程仅作UCOSII和UCOSIII的支持,其他OS,请自行参考着移植
//支持UCOSII
#ifdef OS_CRITICAL_METHOD //OS_CRITICAL_METHOD定义了,说明要支持UCOSII
#define delay_osrunning OSRunning //OS是否运行标记,0,不运行;1,在运行
#define delay_ostickspersec OS_TICKS_PER_SEC //OS时钟节拍,即每秒调度次数
#define delay_osintnesting OSIntNesting //中断嵌套级别,即中断嵌套次数
#endif
//支持UCOSIII
#ifdef CPU_CFG_CRITICAL_METHOD //CPU_CFG_CRITICAL_METHOD定义了,说明要支持UCOSIII
#define delay_osrunning OSRunning //OS是否运行标记,0,不运行;1,在运行
#define delay_ostickspersec OSCfg_TickRate_Hz //OS时钟节拍,即每秒调度次数
#define delay_osintnesting OSIntNestingCtr //中断嵌套级别,即中断嵌套次数
#endif
//us级延时时,关闭任务调度(防止打断us级延迟)
void delay_osschedlock(void)
{
#ifdef CPU_CFG_CRITICAL_METHOD //使用UCOSIII
OS_ERR err;
OSSchedLock(&err); //UCOSIII的方式,禁止调度,防止打断us延时
#else //否则UCOSII
OSSchedLock(); //UCOSII的方式,禁止调度,防止打断us延时
#endif
}
//us级延时时,恢复任务调度
void delay_osschedunlock(void)
{
#ifdef CPU_CFG_CRITICAL_METHOD //使用UCOSIII
OS_ERR err;
OSSchedUnlock(&err); //UCOSIII的方式,恢复调度
#else //否则UCOSII
OSSchedUnlock(); //UCOSII的方式,恢复调度
#endif
}
//调用OS自带的延时函数延时
//ticks:延时的节拍数
void delay_ostimedly(u32 ticks)
{
#ifdef CPU_CFG_CRITICAL_METHOD
OS_ERR err;
OSTimeDly(ticks,OS_OPT_TIME_PERIODIC,&err); //UCOSIII延时采用周期模式
#else
OSTimeDly(ticks); //UCOSII延时
#endif
}
//systick中断服务函数,使用ucos时用到
void SysTick_Handler(void)
{
if(delay_osrunning==1) //OS开始跑了,才执行正常的调度处理
{
OSIntEnter(); //进入中断
OSTimeTick(); //调用ucos的时钟服务程序
OSIntExit(); //触发任务切换软中断
}
}
#endif
//初始化延迟函数
//当使用OS的时候,此函数会初始化OS的时钟节拍
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init()
{
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
u32 reload;
#endif
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //选择外部时钟 HCLK/8
fac_us=SystemCoreClock/8000000; //为系统时钟的1/8
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
reload=SystemCoreClock/8000000; //每秒钟的计数次数 单位为M
reload*=1000000/delay_ostickspersec; //根据delay_ostickspersec设定溢出时间
//reload为24位寄存器,最大值:16777216,在72M下,约合1.86s左右
fac_ms=1000/delay_ostickspersec; //代表OS可以延时的最少单位
SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk; //开启SYSTICK中断
SysTick->LOAD=reload; //每1/delay_ostickspersec秒中断一次
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //开启SYSTICK
#else
fac_ms=(u16)fac_us*1000; //非OS下,代表每个ms需要的systick时钟数
#endif
}
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 ticks;
u32 told,tnow,tcnt=0;
u32 reload=SysTick->LOAD; //LOAD的值
ticks=nus*fac_us; //需要的节拍数
tcnt=0;
delay_osschedlock(); //阻止OS调度,防止打断us延时
told=SysTick->VAL; //刚进入时的计数器值
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow<told)tcnt+=told-tnow; //这里注意一下SYSTICK是一个递减的计数器就可以了.
else tcnt+=reload-tnow+told;
told=tnow;
if(tcnt>=ticks)break; //时间超过/等于要延迟的时间,则退出.
}
};
delay_osschedunlock(); //恢复OS调度
}
//延时nms
//nms:要延时的ms数
void delay_ms(u16 nms)
{
if(delay_osrunning&&delay_osintnesting==0) //如果OS已经在跑了,并且不是在中断里面(中断里面不能任务调度)
{
if(nms>=fac_ms) //延时的时间大于OS的最少时间周期
{
delay_ostimedly(nms/fac_ms); //OS延时
}
nms%=fac_ms; //OS已经无法提供这么小的延时了,采用普通方式延时
}
delay_us((u32)(nms*1000)); //普通方式延时
}
#else //不用OS时
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
//延时nms
//注意nms的范围
//SysTick->LOAD为24位寄存器,所以,最大延时为:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLK单位为Hz,nms单位为ms
//对72M条件下,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
#endif
硬件设计
使用元器件:
单片机:STM32F103;
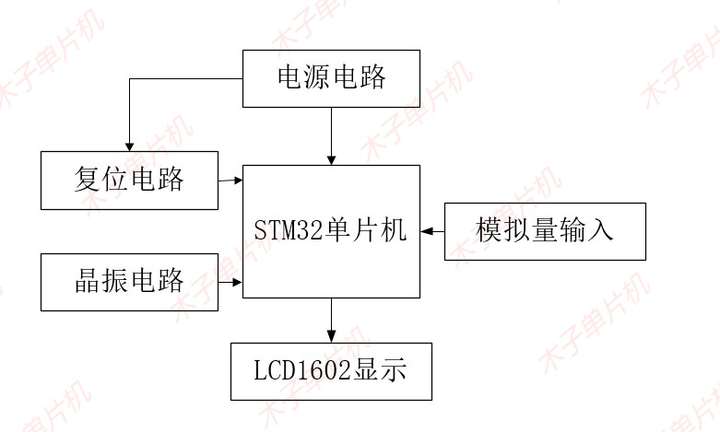
添加图片注释,不超过 140 字(可选)
流程图:
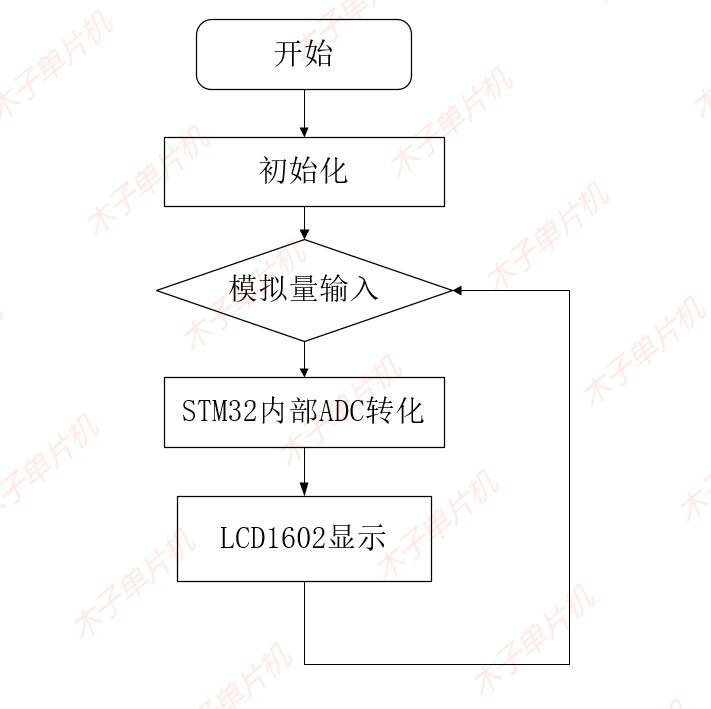
添加图片注释,不超过 140 字(可选)
设计资料
01仿真图
本设计使用proteus8.9版本设计!具体如图!
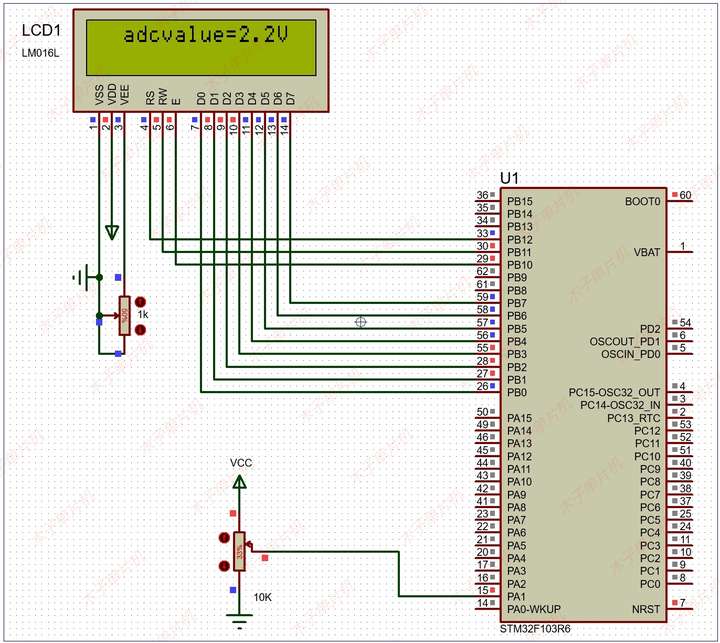
添加图片注释,不超过 140 字(可选)
02程序
本设计使用Keil5 MDK版本编程设计!具体如图!
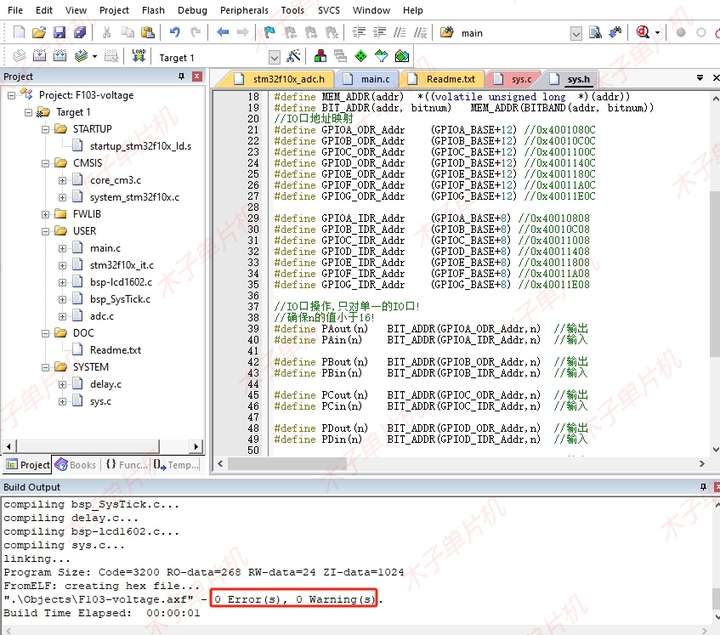
添加图片注释,不超过 140 字(可选)
03设计报告
四千字设计报告,具体如下!
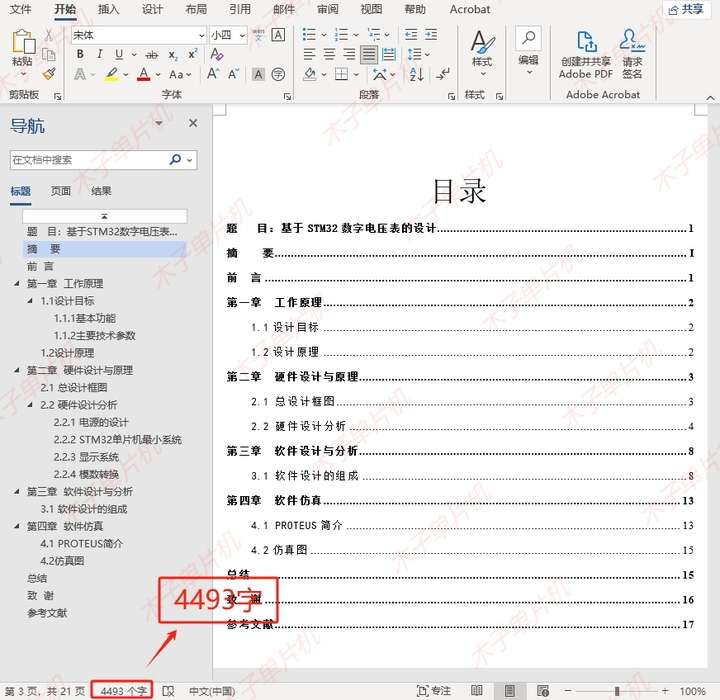
添加图片注释,不超过 140 字(可选)
04设计资料
全部资料包括程序(含注释)、仿真源文件 、设计报告、流程图等。具体内容如下,全网最全! !
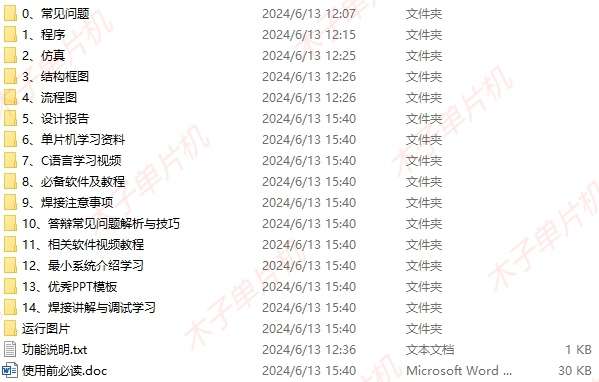
添加图片注释,不超过 140 字(可选)
点赞分享一起学习成长。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 3
3 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)