高频注入(1)辨识位置原理
高频注入法(HFI)是无感FOC中低速工况下的关键技术,通过向电机注入高频信号(500Hz-2kHz),利用IPMSM等凸极电机(Ld≠Lq)的特性获取转子位置。主要方法包括旋转高频电压注入和脉振高频电压注入,通过带通滤波和同步解调处理响应电流,再用PLL提取位置信息。该方法适用于零速/低速控制,但对非凸极电机无效,且存在噪声和计算复杂度问题。实际应用中需平衡注入幅值、处理信号干扰,并在高速时切换
无感FOC(Field-Oriented Control,磁场定向控制)中的高频注入法(High-Frequency Injection, HFI)是一种用于无位置传感器(Sensorless)控制的技术,特别适用于低速或零速工况(此时反电动势难以检测)。其核心原理是通过向电机注入高频信号,利用电机的磁饱和效应或空间凸极性(如IPMSM的内置磁钢凸极特性)来提取转子位置信息。以下是高频注入法的详细原理和实现步骤:
1. 基本原理
高频注入法依赖于电机的凸极性(即d轴和q轴电感差异,Ld≠Lq)。当高频信号注入电机时,由于磁路饱和程度不同,电机的响应会包含转子位置信息。通过解调这些响应信号,可以提取出转子的位置和速度。
关键点:
-
适用电机类型:内置式永磁同步电机(IPMSM)或具有凸极性的同步磁阻电机(SynRM),因为它们的Ld≠Lq。
-
高频信号形式:通常采用正弦波(旋转高频电压)或脉振高频电压(幅值调制信号)。
-
频率选择:注入频率远高于基波频率(通常为500Hz~2kHz),以避免干扰正常控制。
2. 高频注入方法分类
(1) 旋转高频电压注入
-
注入方式:在静止坐标系(α-β轴)注入高频旋转电压信号:
-
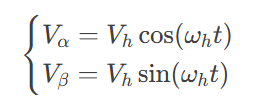
其中,Vh为注入幅值,ωh为高频角频率(2πfh)。
-
响应电流:由于凸极性,高频电流响应会包含转子位置信息:

其中,θr为转子位置,2θr项即位置相关信息。
-
位置解调:通过带通滤波(BPF)提取高频电流,再经同步解调(如锁相环PLL)得到转子位置。
(2) 脉振高频电压注入
-
注入方式:在估计的d轴(d^轴)注入脉振高频电压:

-
响应电流:在估计的q轴(q^轴)会检测到包含位置误差(θ~=θr−θ^r)的电流:
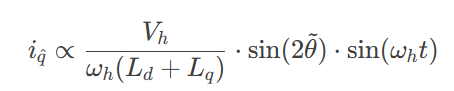
-
误差提取:通过解调iq^中的sin(2θ~)项,利用PLL或观测器闭环修正位置估计。
3. 信号处理流程
-
高频信号注入:在控制电压上叠加高频分量(需避免影响基波控制)。
-
电流采样与滤波:
-
通过带通滤波器(BPF)提取高频响应电流。
-
抑制基波和噪声干扰。
-
-
位置信息解调:
-
对高频电流进行同步解调(与注入信号相乘后低通滤波)。
-
提取包含转子位置的误差信号(如sin(2θ~))。
-
-
位置观测器:
-
使用PLL或状态观测器(如Luenberger)跟踪转子位置。
-
输出估计的θ^r和ω^r。
-
4. 优缺点
优点:
-
适用于零速和低速工况(传统反电动势法失效)。
-
对电机参数变化鲁棒性较强(依赖电感差异而非电阻或磁链)。
缺点:
-
需要电机具有凸极性(表面式永磁电机SPMSM不适用)。
-
高频信号可能引入额外噪声和振动。
-
计算复杂度较高,需实时信号处理。
5. 实际应用注意事项
-
注入幅值选择:过大会引起振动和损耗,过小则信噪比不足。
-
交叉耦合补偿:高频信号可能受基波控制影响,需解耦处理。
-
与反电动势法切换:高速时切换至反电动势法(如滑模观测器)。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 6
6 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)