MPU6050与磁力计融合:攻克Z轴角度漂移的血泪史
MPU6050的Z轴漂移问题让你头疼?本文详解MPU6050+磁力计融合方案,从校准流程、倾斜补偿到互补滤波实现,带您一览笔者攻克Z轴角度漂移难题的惨痛实践!
经过两天熬夜奋战(以及无数杯咖啡的支撑),我终于不得不承认:大家说这个方案难搞真不是没有道理的!作为过来人,我想分享自己尝试用MPU6050+磁力计获取可靠Z轴角度的实战经验,希望能帮到后来者少走弯路(求轻喷,真的尽力了 T_T)。

欢迎关注QQ频道:电赛工坊
文章目录
1. 为什么单MPU6050无法获得可靠的Z轴角度?
虽然《MPU6050的救星!QMC5883L磁力计抗漂移完全指南(上篇)》文章已经提过这个问题,但从后台反馈看,很多小伙伴还是对MPU6050的Z轴缺陷存在疑惑,这里我再深入解释一下。
MPU6050计算Z轴角度的原理是:将初始位置设为Z轴零点,通过陀螺仪积分来检测相对旋转角度。但这里存在两个致命问题:
- 相对测量缺陷:陀螺仪只能提供相对于初始位置的转角变化,而非绝对角度;
- 误差累积效应:即使微小的积分误差也会随时间不断累积,导致"角度漂移"现象。你会发现,即使设备回到了物理上的初始位置,读数却可能已经偏差了十几度!
为什么MPU6050+磁力计是黄金组合?
- MPU6050的短板:虽然6轴IMU能精确测量X/Y轴姿态,但Z轴缺乏绝对参考;
- 磁力计的优势:以地磁北极作为绝对参考,能提供精确的航向角(Z轴角度)
而两者结合组合的互补性简直堪称完美!
磁力计单独使用时,一旦设备倾斜,测量轴与地磁场不对齐就会产生误差,MPU6050恰好能提供精确的X/Y轴倾斜数据(通过加速度计和陀螺仪),二者结合,MPU6050为磁力计提供倾斜补偿,磁力计为MPU6050提供Z轴绝对参考。
2. 复杂的初始化流程:从疯狂旋转到静置水平校准
“复杂”绝不是夸大其词,这是笔者的整个校准流程
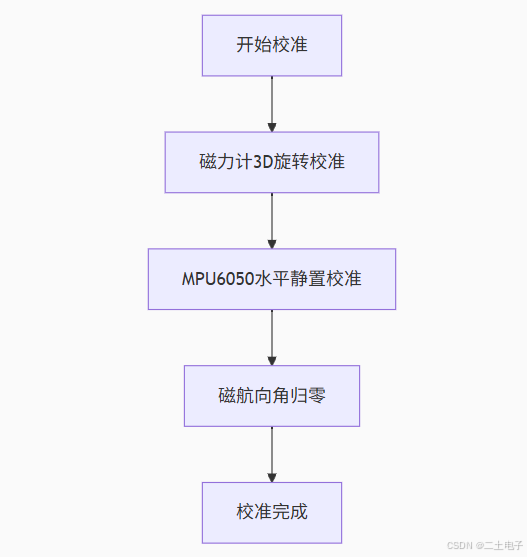
我们来详细介绍一下磁力计与MPU6050的联合校准流程
(一)磁力计3D旋转校准
(原理详见上篇文章)通过三维空间旋转设备,采集多组磁场数据,计算并消除硬铁干扰(固定磁场偏移)和软铁干扰(磁场畸变效应),建立准确的磁场测量基准。
(二)MPU6050水平静置校准(双阶段)
a) 加速度计校准:
- 水平静置设备,采集10组加速度数据
- 计算各轴平均值,确定零位偏置(重力矢量基准)
b) 陀螺仪校准:
- 保持设备绝对静止,采集10组角速度数据
- 计算各轴零偏电压(消除静止状态下的角速度漂移)
- 建立陀螺仪零位参考基准
(三)磁航向角归零校准
a) 姿态验证:
- 实时读取MPU6050的X/Y轴角度
- 确认设备处于水平状态(俯仰/横滚角<±5°)
b) 航向基准建立:
- 连续计算10次磁航向角数据
- 计算平均值作为零位偏置(消除随机误差)
整个初始化程序设计如下
/* ---------------------------------- 磁力计校准 ---------------------------------------- */
QMC5883L_RawData raw;
Med_Qmc5883l_Init();
/* 开始校准 */
printf("Starting calibration...\r\n");
printf("Please rotate the device slowly in all directions\r\n");
delay_ms(1000);
delay_ms(1000);
Med_Qmc5883l_StartCalibration();
/* 旋转设备进行校准 (约10秒) */
for(u16 i = 0; i < 1000; i++)
{
if(Med_Qmc5883l_ReadRawData(&raw) == 0)
{
printf("Calibrating... %d%%\r\n", i/10);
delay_ms(10);
}
}
Med_Qmc5883l_EndCalibration();
/* 校验校准结果 */
u8 calibStatus = Med_Qmc5883l_VerifyCalibration();
if(calibStatus != 0)
{
printf("\nCalibration failed! Error code: %d\r\n", calibStatus);
printf("1:Insufficient rotation 2:Strong interference 3:Abnormal scale\r\n");
while(1); // 阻塞
}
printf("\nCalibration success!\r\n");
delay_ms(1000);
/* ---------------------------------- MPU6050校准 ---------------------------------------- */
Med_Mpu6050_Init();
printf("Place device horizontally for IMU calibration...\r\n");
delay_ms(1000);
delay_ms(1000);
delay_ms(1000);
MPU6050_CalibrateZeroPosition(); // 加速度计零偏校准
Calibrate_Gyro_ZeroOffset(); // 陀螺仪零偏校准
printf("IMU calibration complete\r\n");
/* --------------------------------- 磁航向偏置校准 --------------------------------------- */
printf("\nKeep device in zero heading position...\r\n");
printf("Calibrating heading bias in 3 seconds...\r\n");
delay_ms(1000);
delay_ms(1000);
if (Med_Qmc5883l_CalibrateHeadingBias() != 0)
{
printf("Heading bias calibration failed!\r\n");
printf("1:Device is not level 2:QMC data is inmalid\r\n");
while(1); // 阻塞
}
printf("Heading bias calibration success!\r\n");
Exit_Init();
3. 磁航向角倾斜补偿算法实现
在上一篇文章中我们了解到,单独使用磁力计时由于无法感知设备倾斜状态,会导致航向角计算误差。现在通过结合MPU6050提供的姿态数据,我们可以实现精确的倾斜补偿。
倾斜补偿原理
当设备倾斜时,我们需要将磁力计测量的磁场矢量从设备坐标系转换到水平坐标系。这个转换需要:
- MPU6050提供的精确俯仰角(pitch)和横滚角(roll)
- 磁力计校准后的三轴磁场数据
- 通过旋转矩阵计算水平面上的磁场分量
优化后的计算磁航向角的函数如下
/**
* @brief 计算校准后的磁航向角(含倾斜补偿)
* @param gauss[3]: 已校准的三轴磁力计数据(单位:高斯)
* @param roll_deg: 当前横滚角(度)
* @param pitch_deg: 当前俯仰角(度)
* @retval 相对于校准零位的航向角(0-360度)
*/
float Med_Qmc5883l_CalculateHeading (float gauss[3], float roll_deg, float pitch_deg)
{
/* 倾斜补偿(转换为弧度) */
float roll = roll_deg * PI / 180.0f;
float pitch = pitch_deg * PI / 180.0f;
/* 计算补偿后的水平磁场分量 */
float Xh = gauss[0] * cosf(pitch) + gauss[2] * sinf(pitch);
float Yh = gauss[0] * sinf(roll) * sinf(pitch)
+ gauss[1] * cosf(roll)
- gauss[2] * sinf(roll) * cosf(pitch);
/* 计算原始磁航向 */
float heading = atan2f(Yh, Xh) * 180.0f / PI;
/* 应用航向偏置校准 */
heading -= gCalibration.heading_bias;
/* 规范化角度 */
if(heading < 0) heading += 360.0f;
else if(heading >= 360.0f) heading -= 360.0f;
return heading;
}
4. 融合MPU6050和磁力计数据
最后是我们的关键一步,如何把MPU6050的数据和磁力计的数据融合起来,笔者在设计这一段程序的时候头发真的是大把大把地调啊!!!
4.1 精确时间差计算的关键考量
由于陀螺仪数据的单位是°/s,想要要得到角度变化量必须乘以时间差dt,所以我们需要知道当前计算和上次计算的间隔时间,笔者这里使用滴答定时器来获取时间差
/* 获取当前 SysTick 计数值(24位递减计数器) */
u32 Get_SysTick_Val(void)
{
return SysTick->VAL & 0xFFFFFF; // 只取低24位
}
/* 计算时间差(单位:毫秒) */
u32 Get_Delta_Time_Ms(uint32_t last_count)
{
u32 current_count = Get_SysTick_Val();
u32 elapsed_ticks;
if (current_count <= last_count)
{
elapsed_ticks = last_count - current_count;
}
else
{
/* 计数器重载情况 */
elapsed_ticks = last_count + (SysTick->LOAD - current_count);
}
return elapsed_ticks / SYSTICK_MS_TO_TICKS; // 转换为毫秒
}
虽然MPU6050配置为200Hz采样率(理论中断间隔5ms),但笔者没有简单地固定dt=5ms,而是选择动态计算实际时间差,主要有以下原因:
- 数据处理耗时:姿态解算算法本身的执行时间会影响实际采样间隔
- 系统调度影响:当系统中有更高优先级的中断时,MPU6050中断可能被延迟处理
这种动态时间计算方式确保了即使在复杂的实时系统中,我们也能获得准确的时间差数据。
4.2 数据融合:互补滤波的实践与挑战
在姿态解算系统中,数据融合算法是决定系统性能的关键。笔者经过多次尝试,最终选择了互补滤波方案,在计算效率和稳定性之间取得了较好的平衡。以下是融合算法的详细实现:
算法实现要点
/**
* @brief 获取融合后的三轴角度(Pitch/Roll/Yaw)
* @param pitch: 俯仰角指针(度)
* @param roll: 横滚角指针(度)
* @param yaw: 航向角指针(度)
* @note 需在MPU6050的INT中断中调用,确保数据同步
*/
void Get_Fused_Angles(float *pitch, float *roll, float *yaw)
{
static uint32_t last_count = 0;
uint32_t dt_ms = Get_Delta_Time_Ms(last_count); // 获取精确时间差
last_count = Get_SysTick_Val();
/* 时间差保护机制 */
if (dt_ms > 10) dt_ms = 10; // 限制最大10ms,防止系统卡顿导致误差累积
float dt = dt_ms / 1000.0f; // 转换为秒单位
传感器数据读取与预处理
/* 读取并转换MPU6050原始数据 */
float accelX, accelY, accelZ;
float gyroX, gyroY, gyroZ;
// 加速度计数据读取(16位有符号数)
accelX = (short)((Med_Mpu6050_ReadReg(MPU_ACCEL_XOUTH_REG) << 8) |
Med_Mpu6050_ReadReg(MPU_ACCEL_XOUTL_REG));
// 陀螺仪数据读取并转换为°/s(减去零偏)
gyroX = (short)((Med_Mpu6050_ReadReg(MPU_GYRO_XOUTH_REG) << 8 |
Med_Mpu6050_ReadReg(MPU_GYRO_XOUTL_REG)) / 16.4f - gGyroZeroX;
姿态解算核心逻辑
/* 加速度计姿态解算(长期稳定但动态响应差) */
float accel_pitch = atan2f(accelY, accelZ) * 180.0f / PI;
float accel_roll = atan2f(-accelX, sqrtf(accelY*accelY + accelZ*accelZ)) * 180.0f / PI;
/* 陀螺仪积分姿态(短期精确但会漂移) */
static float fused_pitch = 0, fused_roll = 0, fused_yaw = 0;
fused_pitch += gyroX * dt; // 角度积分:°/s × s = °
互补滤波融合策略
/* 俯仰/横滚融合:加速度计+陀螺仪 */
float alpha = 0.98f; // 陀螺仪权重系数
fused_pitch = alpha * fused_pitch + (1 - alpha) * accel_pitch;
fused_roll = alpha * fused_roll + (1 - alpha) * accel_roll;
/* 航向角融合:磁力计+陀螺仪 */
if (磁力计数据有效)
{
float beta = 0.3f; // 磁力计权重(经实测调整)
fused_yaw = (1-beta)*(fused_yaw + gyroZ*dt) + beta*mag_yaw;
}
5. 笔者の终极方案
经过72小时的反复调试和无数杯咖啡的陪伴,从满怀希望到无奈放弃,笔者虽然在MPU6050与磁力计的融合方案中取得进展,但是Z轴角度依旧存在很大的问题,这段经历让我深刻理解:有时候选择比努力更重要。相比于选择MPU6050+磁力计这种曲线救国的方案,直接采用MPU9250这种集成磁力计的九轴传感器真的能省去很大力气,如果从一开始就采用集成了磁力计的MPU9250,至少能节省80%的调试时间!
想知道如何优雅地使用MPU9250实现完美的九轴数据融合?我们的完整解决方案和优化代码已经准备就绪。如果这篇文章对你有帮助,欢迎打赏支持,你的鼓励将是我们分享MPU9250实战教程的最大动力!

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 28
28 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)