【成品设计】基于RTK实时定位的自主导航小型地面无人车
本文介绍了一款基于RTK实时定位的自主导航小型无人车设计方案。该无人车采用STM32F103C8T6作为主控,配备双频高精度GNSS模组、陀螺仪、电机驱动模块等核心部件,实现三大功能:1)通过手机APP进行蓝牙遥控;2)利用RTK定位实现自主导航,PC端可设置多目标点;3)采用增量式PID算法实现两轮差速闭环控制。系统还包含无线数传、电源管理等模块,具有实时运动参数显示功能。成品包含PCB设计、组
·
V1《基于RTK实时定位的自主导航小型地面无人车》
V1功能说明:
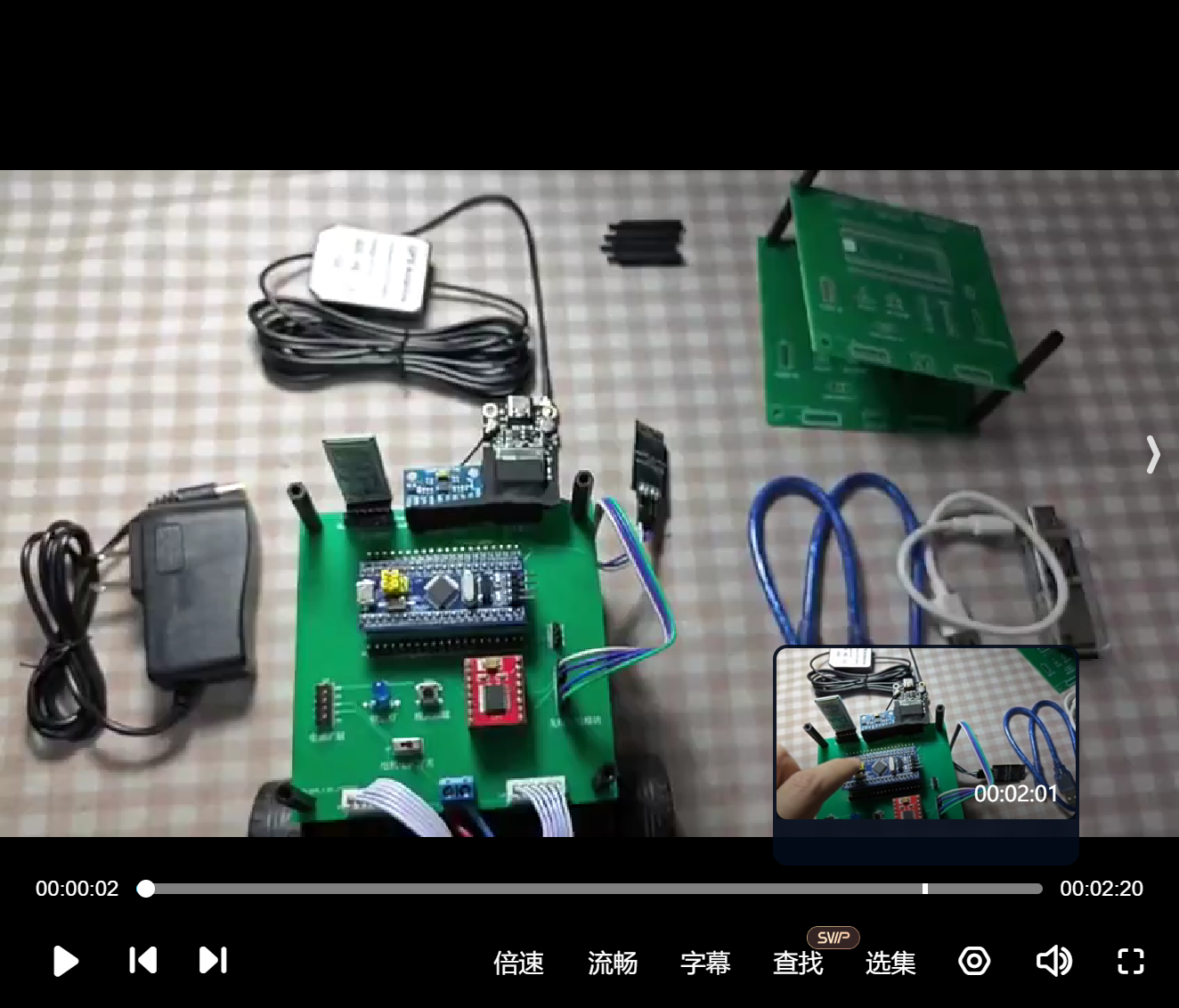
所需器件:
- STM32F103C8T6单片机:作为小车的主控制芯片。
- 陀螺仪:集成陀螺仪反馈,获取小车自身姿态。
- 小车底盘:2个万向轮+2个驱动轮、2个电机(内部集成减速器和编码器)。
- TB6612FNG电机驱动模块用于控制直流减速电机。
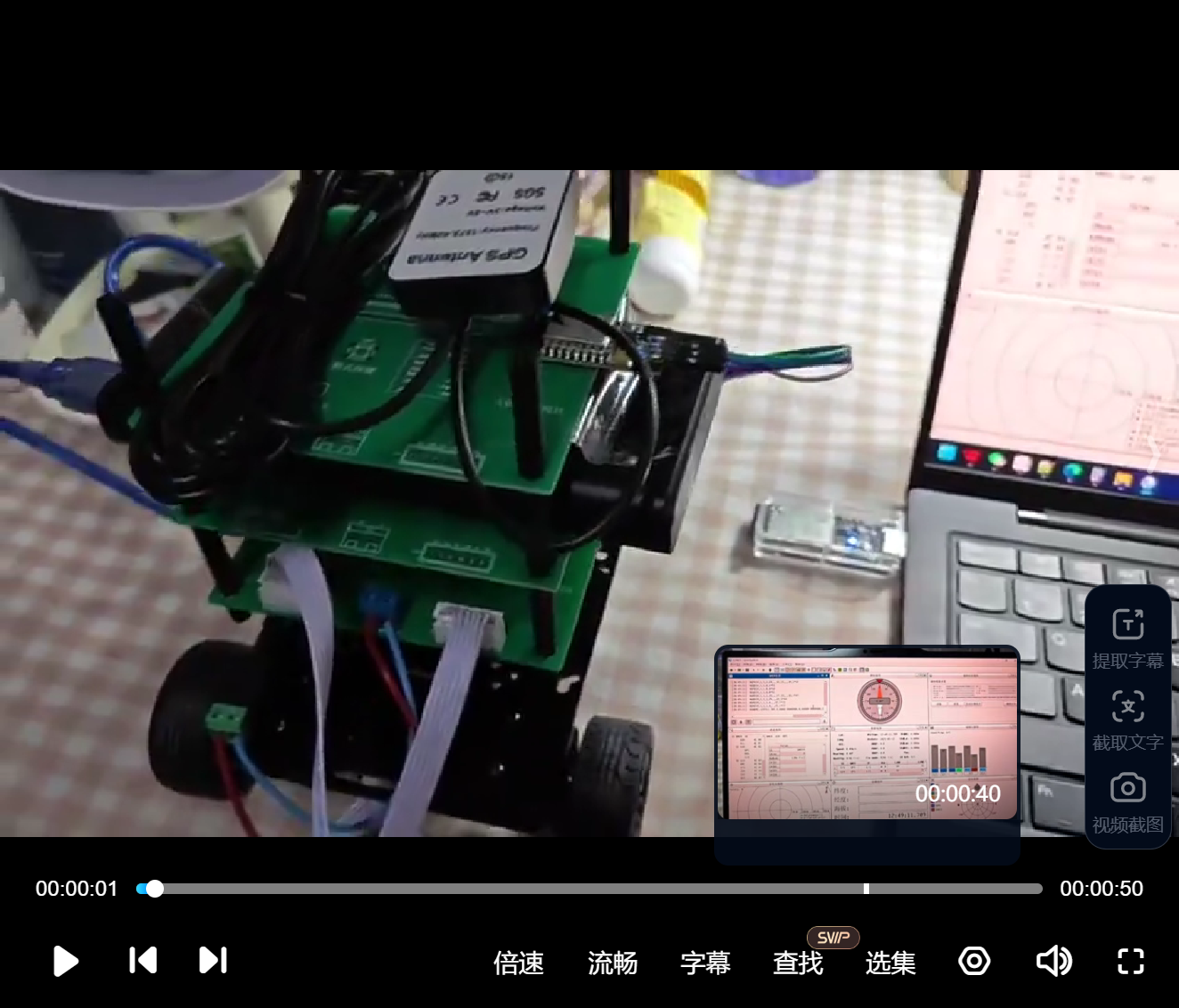
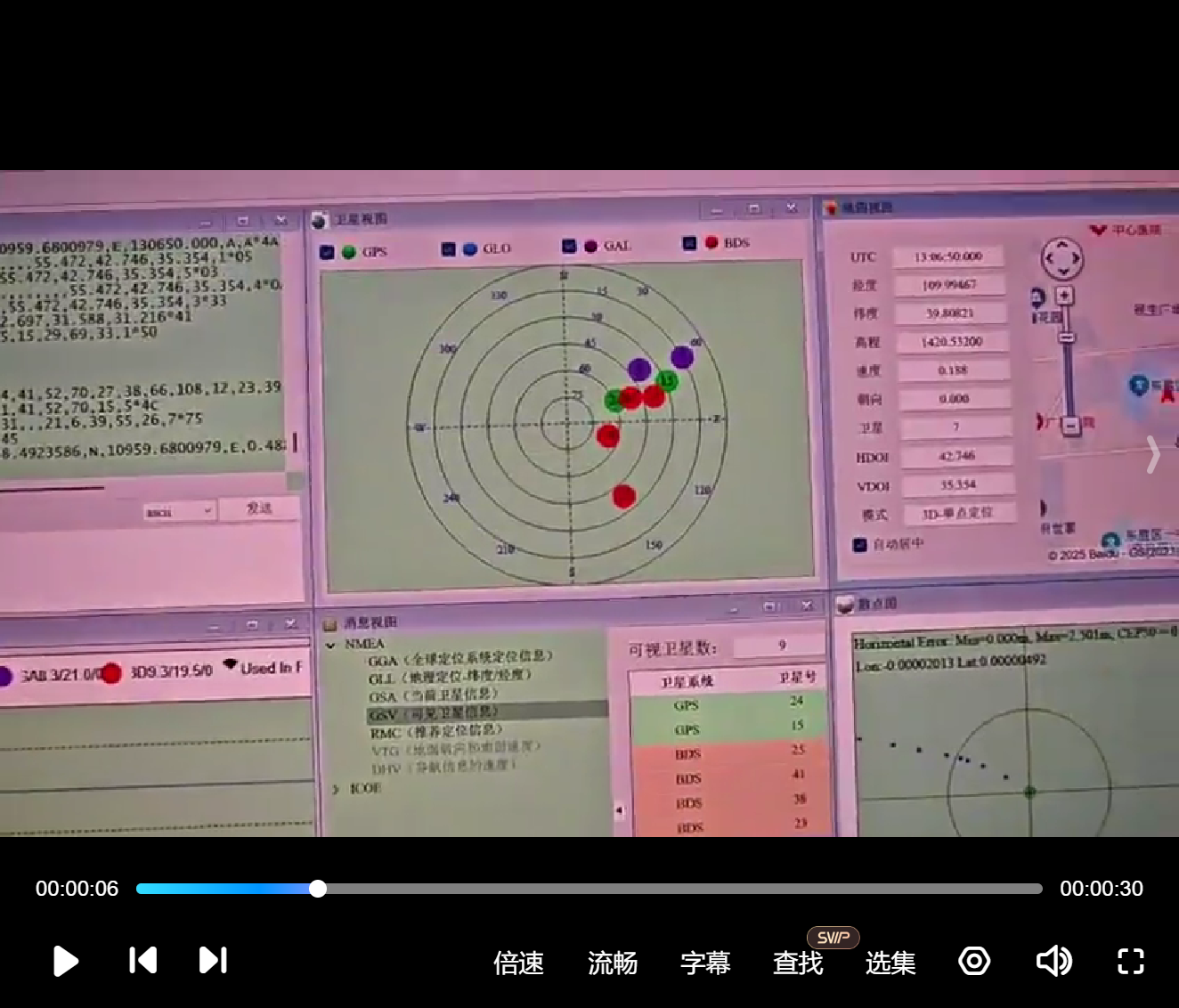
- 低功耗高灵敏度双频多系统高精度gnss模块 RTK定位F9P模组+天线:用于获取当前定位数据。
- 无线数传模块设备端+PC端:用于小车和PC端数据传输。
- 电源管理模块:12V电池包+充电模块用于小车供电。
- 蓝牙模块:连接手机通过APP进行小型无人车运动控制功能以及数据回传等功能。
- 按键、指示灯、端子、结构件等
PCB打板+焊接+组装(含小车整体组装)+包装:
整体功能:
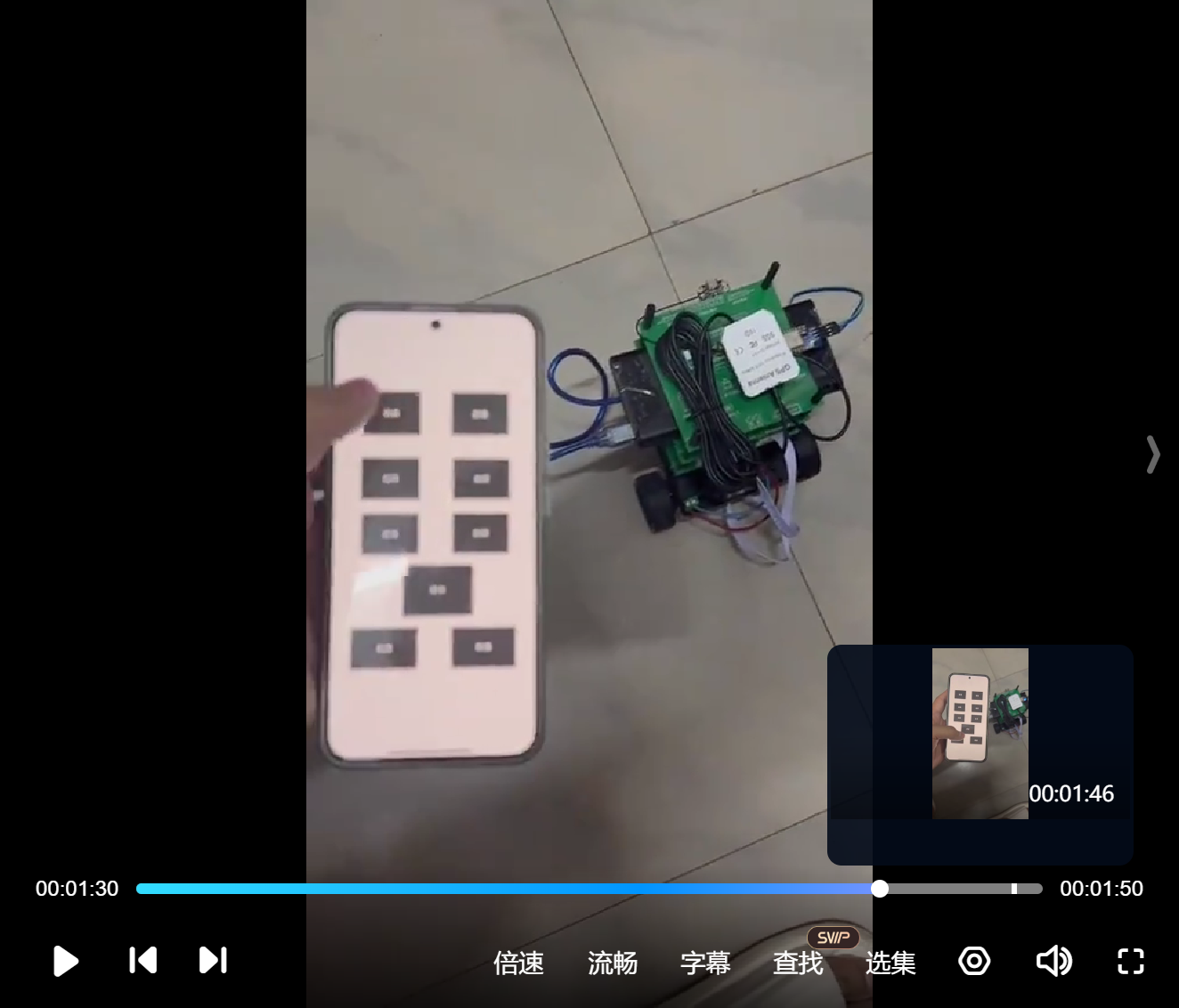
- 蓝牙遥控功能:可通过手机APP进行远程控制小车的全方向、速度,并在手机可实时查看小车的运动参数。
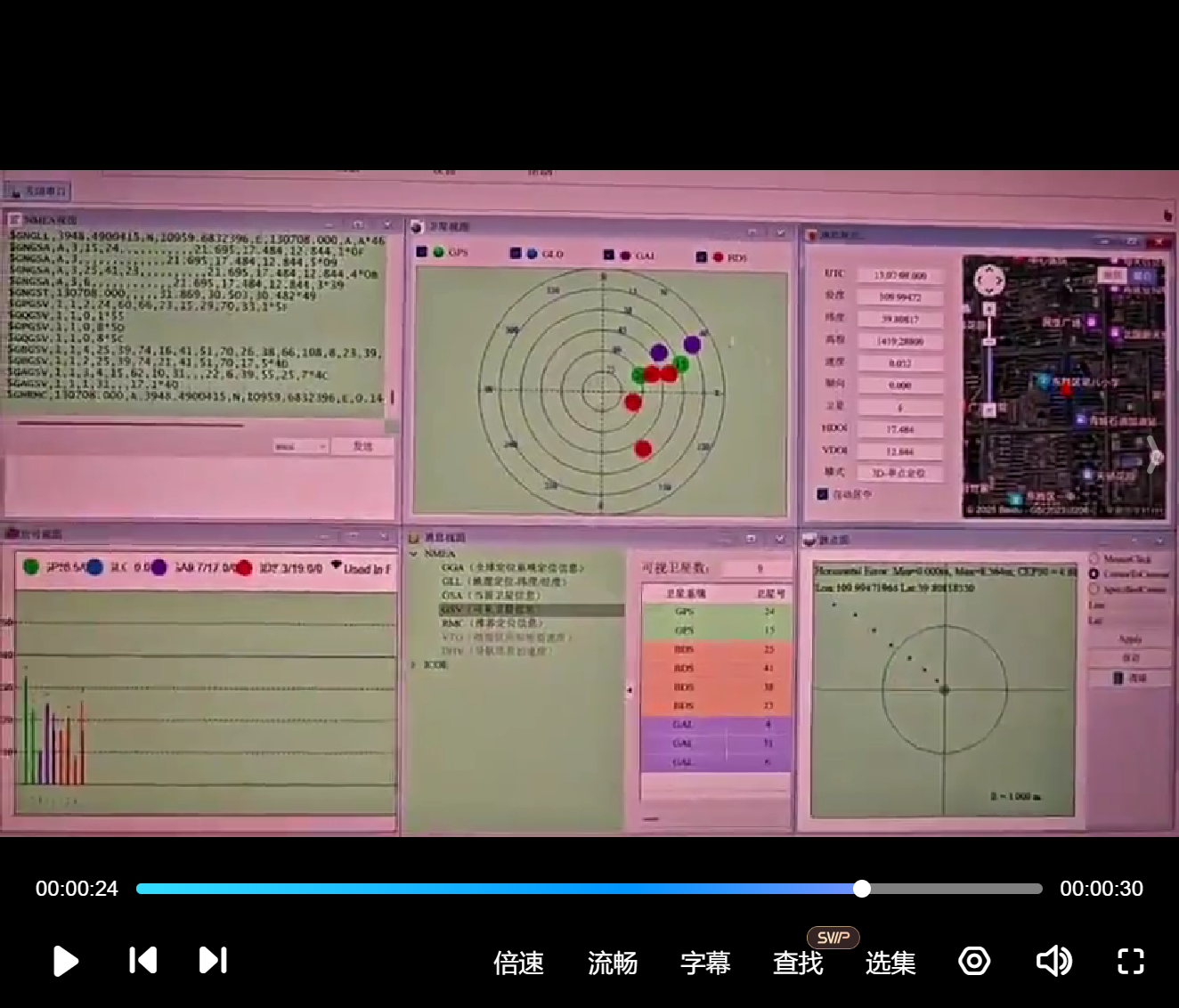
- 自主导航功能:通过GPS模块获得小车精准定位数据,并上传给PC端。可在PC端下发多点目的地坐标并计算,小车收到指令后自动行驶到目的地。
- 两轮差速PID控制:通过增量式PID算法实现对小车运动的闭环控制。
V1作品展示:

V1资料详情:
说明:
成品设计不易,详情关注XianYu:数字梦想家,查看评论区。


智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)