基于STM32单片机的智能导盲系统的设计与实现
本文介绍了一种基于STM32F103C8T6单片机的智能导盲系统设计方案。系统整合超声波测距、三轴加速度传感、GPS定位、GSM通信等多种功能模块,实现障碍物检测、环境亮度监测、跌倒报警、定位导航和紧急求助等核心功能。硬件设计以STM32为核心控制单元,通过合理的电路连接实现各模块协同工作;软件设计采用模块化思路,确保系统稳定运行和快速响应。测试结果表明,该系统能够准确检测障碍物距离、识别跌倒状态
第2章 总体方案概述
2.1 系统总体设计方案
本系统旨在设计一套面向视障人群的智能导盲辅助设备,以STM32F103C8T6单片机作为核心控制单元,整合多种传感器与通信模块,实现对障碍物、环境光线、用户姿态、位置信息的实时感知与处理,同时具备紧急求救功能,提升视障者的出行安全性与自主能力。系统由感知模块、控制模块、通信模块、显示模块与人机交互模块组成,各功能模块通过STM32进行统一协调与逻辑判断,形成一个反应快速、运行稳定、功能丰富的智能导盲平台。
在感知层面,系统配置了SR04超声波传感器用于前方障碍物距离检测,ADXL345三轴加速度传感器实现跌倒状态识别,5528光敏电阻模块用于环境光照检测,VK2828 GPS模块提供实时位置信息支持。控制层通过STM32实现各传感器数据采集与分析,根据判断结果驱动相应的声光报警器件,并通过OLED屏幕显示反馈信息。通信层集成SIM800 GSM模块,可实现短信与电话通信功能,在突发事件中将位置信息发送至绑定手机号并拨打求救电话。
系统交互设计简洁,设置5个功能按键和1个电源按键,分别实现最小安全距离设置、手机号设定、一键求救、挂断通话与取消报警等操作。整体结构紧凑,逻辑清晰,各功能模块之间通信稳定,硬件资源分配合理,具备较好的可扩展性与可维护性。该设计综合考虑实用性、可靠性与人性化,为视障人群提供了一种高效、智能的导盲辅助解决方案。
2.2 系统需求分析
为满足视障人群在日常出行中的安全与便利需求,系统需具备障碍物检测、光照监测、跌倒报警、定位导航和紧急求助等核心功能。用户在使用过程中,应能通过简单按键操作完成系统设置与紧急响应,同时系统应具备良好的实时性和稳定性,确保在复杂或突发环境下准确执行各项任务。硬件结构应尽量轻便、模块化,便于用户随身携带和日常使用;软件设计应逻辑清晰、响应迅速,并能在低功耗模式下长时间运行。整体系统需以保障用户人身安全为首要目标,兼顾实用性与成本控制,确保具有良好的推广应用前景。
第3章 硬件设计
3.1 硬件总体设计方案
本系统以STM32F103C8T6单片机为核心控制单元,围绕视障人群出行安全与实时求助需求,构建了一个集障碍检测、环境感知、定位追踪、语音通话与紧急报警于一体的智能导盲系统。STM32作为主控芯片,负责各类传感器的数据采集与处理、外设控制以及整体系统的逻辑协调与功能实现。
在环境感知方面,系统集成了SR04超声波传感器,用于实时检测前方障碍物的距离信息。当检测到物体接近设定的最小安全距离时,系统将自动触发蜂鸣器报警,并通过OLED屏幕显示当前距离信息。5528光敏电阻用于监测环境亮度变化,在光线过暗时系统自动点亮LED灯,为使用者提供视觉提示并提升夜间出行安全性。ADXL345三轴加速度传感器用于监测用户是否发生跌倒,一旦检测到跌倒状态,系统立即进入警报模式,并自动发送求助信息。
定位与通信模块方面,系统采用VK2828 GPS模块获取当前经纬度信息,OLED屏幕可同步显示位置信息,方便用户或他人确认所在位置。SIM800 GSM模块支持短信和通话功能,一旦发生异常情况,可通过预设按键实现一键求救,自动向指定号码发送位置短信,并拨打紧急电话。配合麦克风与喇叭,可实现双向语音通话,增强紧急联络的实效性与人机交互能力。
为提升用户控制的便利性,系统配备5个功能按键与1个电源按键。用户可通过按键设置最小安全距离、修改接收短信的手机号、执行求救、挂断通话或取消报警等操作,操作逻辑清晰、使用灵活,满足不同使用场景需求。
综合来看,该系统以STM32单片机为核心,整合传感器、定位、通信、报警及显示模块,构建了一个功能完备、响应灵敏的导盲辅助平台,具有良好的实用性与推广价值。其硬件的总体设计方案图如下: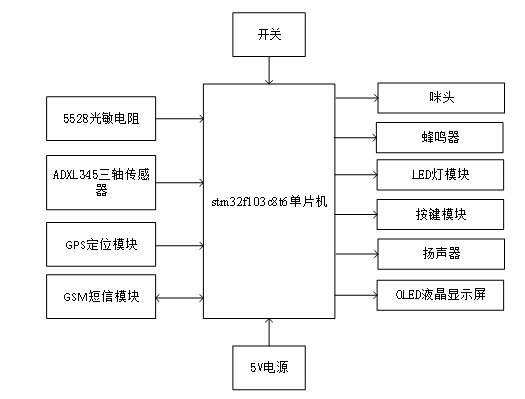
图 3.1 硬件结构图
3.2 STM32F103C8T6单片机电路设计
STM32F103C8T6是ST公司推出的一款基于ARM Cortex-M3内核的高性能32位单片机,具有运算速度快、资源丰富、功耗低、性价比高等特点,广泛应用于工业控制、智能穿戴、医疗电子等嵌入式系统中。在本系统中,STM32F103C8T6作为核心控制器,主要承担各模块的数据采集、逻辑判断与整体运行的协调控制任务。
该芯片运行主频高达72MHz,内置64KB Flash和20KB SRAM,能够满足本系统对数据存储和处理速度的要求。芯片封装为LQFP48封装形式,共有37个通用I/O口,支持丰富的通信接口,包括USART、I2C、SPI、ADC、PWM等,可方便地与各种传感器和外设模块连接。系统中通过GPIO接口连接SR04超声波传感器、光敏电阻、蜂鸣器、LED灯等,实现对环境信息的实时采集与输出控制。GPS模块与GSM模块分别通过串口与STM32通信,实现定位信息接收与信息传输功能。
电源部分,STM32芯片供电电压为3.3V,图中通过OUT-3.3V与VDD_3引脚为芯片供电,VSS_3和GND作为地线引出,确保系统稳定工作。芯片外围电路中包含NRST复位引脚、OSC_IN外部晶振引脚等,用于系统复位和时钟源输入。程序下载接口位于46~48脚,包括SWCLK、SWDIO和GND,可通过ST-Link等仿真器完成系统程序烧录与调试。
图中引脚定义清晰,布局紧凑,便于后期电路板的设计与布线。整体来看,STM32F103C8T6凭借其出色的性能与良好的扩展性,为本智能导盲系统的稳定运行与多功能集成提供了坚实的硬件基础。
以下是单片机接口和原理图: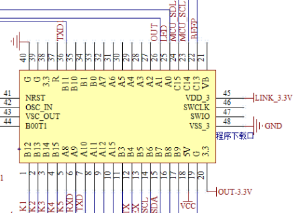
图 3.2 单片机接口和原理图
3.3 三轴传感器电路设计
本系统采用ADXL345三轴加速度传感器,用于实现跌倒检测功能。ADXL345是一款小型、超低功耗、三轴加速度测量模块,能够以高分辨率输出X、Y、Z三个方向的加速度信息。该传感器具有较高的灵敏度和良好的抗干扰能力,支持I2C和SPI两种通信方式,适用于移动检测、姿态识别等多种应用场景。在智能导盲系统中,ADXL345用于检测用户的动态姿态变化,当识别到异常状态(如跌倒)时,STM32将触发报警机制,提升用户安全保障。
从原理图可见,ADXL345通过其SCL(时钟线)与SDA(数据线)引脚与STM32单片机的I2C通信接口连接,分别对应MCU_SCL1和MCU_SDA2,引脚3和4为中断输出引脚INT2与INT1,用于事件检测中断功能,但在本系统中暂未启用中断引脚,主要通过轮询方式采集加速度数据。引脚6(CS)用于通信方式选择,接高电平时为SPI模式,接低电平或悬空则为I2C模式,因此本设计将CS引脚悬空,默认使用I2C通信。引脚7(VS)与引脚9(3V3)连接为模块供电部分,与系统3.3V电源共用;引脚8连接系统地线GND,确保信号稳定;引脚10(5V)为备用高电压输入引脚,实际使用中未接入,以确保模块稳定性和电平兼容。
ADXL345在实际应用中支持±2g、±4g、±8g和±16g四档量程选择,系统可根据实际需求通过程序设置不同的灵敏度等级,提升跌倒检测的准确性。在软件编程中,STM32通过I2C总线向ADXL345发送指令,读取其内部寄存器的三轴数据,并实时判断加速度变化是否达到预设的跌倒阈值。若超过阈值,则判定为跌倒事件,系统立即启动报警程序,同时通过GSM模块发送求助信息并触发蜂鸣器报警。
综上所述,ADXL345三轴传感器在本系统中不仅实现了对用户状态的动态监测,而且其简单的电路结构与低功耗特性,保证了系统整体的可靠性和稳定性,是构建跌倒监测功能的理想传感器模块。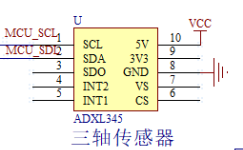
图 3.3 三轴传感模块
第4章 软件设计
4.1 软件总体设计方案
本次设计是基于STM32F103C8T6单片机的智能导盲系统,系统整合了STM32主控芯片、SR04超声波测距模块、ADXL345三轴加速度传感器、VK2828U7 GPS定位模块、SIM800 GSM通信模块、OLED液晶显示屏、蜂鸣器、LED灯、5528光敏电阻、麦克风、喇叭等多个功能模块。系统可实现视障用户出行过程中的障碍物检测、环境亮度监测、跌倒状态判断、定位信息获取及紧急呼叫求助等功能。用户通过按键设置最小安全距离与接收短信的手机号,在关键情况下可一键求助,系统会自动通过GSM模块发送含有经纬度信息的短信并拨打电话,同时蜂鸣器报警提示周围人员。
在环境感知方面,超声波传感器实时检测用户前方障碍物的距离信息,一旦小于设定安全阈值即发出声音提示;光敏电阻检测环境亮度,在夜间或光线较暗时自动点亮LED灯以增加用户安全感;三轴加速度传感器持续监测用户的运动状态,当识别到跌倒动作时系统自动进入报警模式。
在信息处理和交互方面,STM32单片机作为主控芯片,统一调度各模块协同工作,并通过OLED屏幕实时显示当前距离、经纬度等关键数据。VK2828 GPS模块提供定位功能,SIM800模块负责短信与电话的发送接收,实现远程通信。系统共设有5个功能按键与1个电源按键,用于功能控制、数据设定与紧急操作,操作简便,实用性强。
整个系统结构清晰、响应迅速、低功耗运行,具有良好的稳定性与扩展性,适合推广至实际应用中,为视障人群出行提供有效辅助支持。
软件的总体流程图如下所示: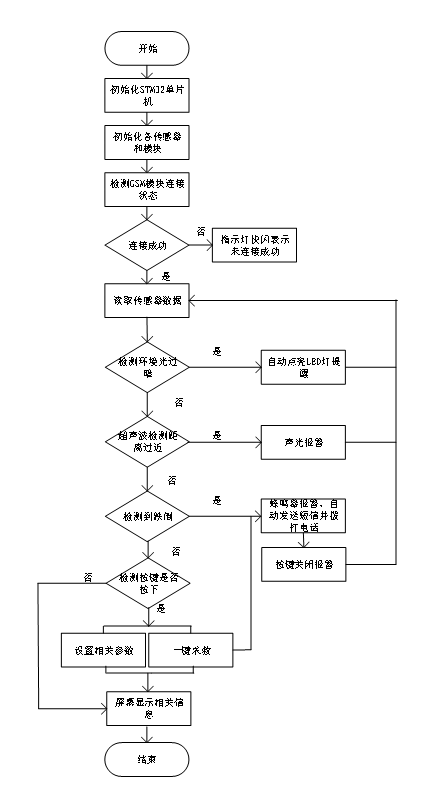
图 4.1 运行示意图
第5章 系统调试
5.1 电路板焊接测试
在系统组装完成后,电路板焊接测试是验证硬件设计正确性的第一步。测试过程首先使用电路笔对所有焊接点进行检查,确保每个连接点都经过了合理的焊接,没有出现漏焊或者假焊的现象。特别是对于STM32单片机、超声波传感器、GPS模块等关键元件的焊接,需要特别注意焊接的牢固性与正确性。按照程序原理图逐一确认每个元器件的引脚连接,确保所有的引脚都按照设计要求正确连接,并且没有接错或者短路现象。通过电路笔检测每条连接线的导通性,确保信号传递无误。测试过程中,还需检查电源供应电压是否稳定,所有电源线与地线的连接是否良好。完成所有焊接检查后,可以通过实际通电运行进行进一步的验证,确保系统能够正常工作。经过测试后,电路板的焊接没有发现漏焊或焊接错误的现象,系统能够稳定启动,表明硬件焊接部分无误。如图5-1和5-2所示。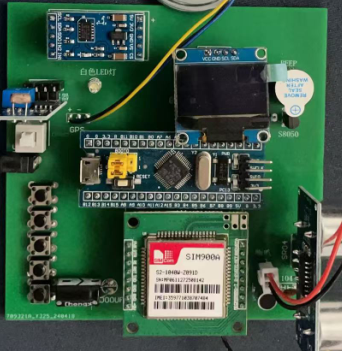
图 5.1 电路板焊接测试图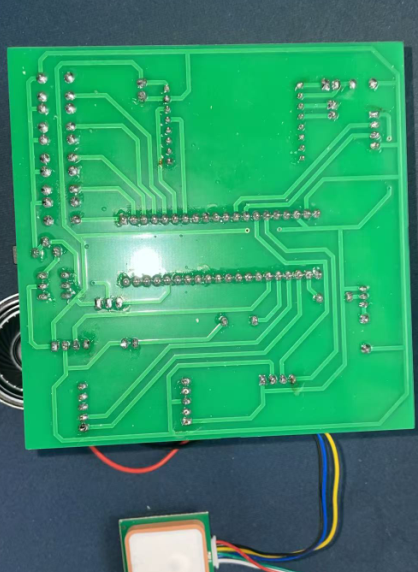
图 5.2 电路板背部焊接测试图
5.2 距离检测测试
距离检测测试是对SR04超声波测距模块功能的验证。在测试过程中,首先通过STM32单片机控制超声波传感器的TRIG引脚,发出一个短暂的触发信号。此时,超声波模块会发出超声波,并测量声波从传感器发射到接收到回波的时间。接着,STM32通过ECHO引脚获取回波信号的持续时间,并根据时间差计算出前方障碍物的距离。测试时,用户将手逐步靠近超声波传感器,观察系统的反应。当手靠近到一定距离时,系统会通过蜂鸣器发出警报声,并在OLED屏幕上显示当前的距离数值,同时屏幕上的距离值会随着手的靠近而变化,测试是否与实际距离一致。此时,蜂鸣器的声光报警会按照设定的最小安全距离进行触发,确保用户能在障碍物靠近时及时得到警示。通过多次测试,确认系统能够准确测量并反馈前方障碍物的距离,并且声光报警和屏幕显示功能稳定无误,如图5-3所示。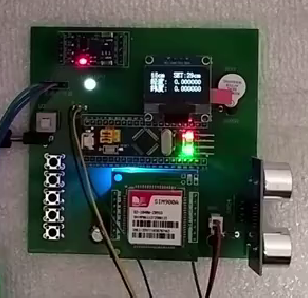
图 5.3 距离检测测试图
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 20
20 0
0- 0



 已为社区贡献55条内容
已为社区贡献55条内容

所有评论(0)