手搓STM32H743开源飞控系列教程---(五) 飞控IMU方向调整
摘要:本文介绍了STM32H743开源飞控(WFG100)的IMU和罗盘方向调整方法。飞控默认焊盘朝上为顶面,三角形箭头指向机头方向。对于APM固件,通过修改AHRS_ORIENTATION和COMPASS_ORIENT参数可调整IMU和罗盘方向;对于BF固件,则需在配置页面进行相应设置。文章详细说明了参数修改步骤,并提供了视频演示链接,帮助用户根据实际装机需求调整飞控朝向。该教程适用于需要翻转、
开源飞控所有资料均汇总在:物唯AI智慧文档
CSDN系列文章
手搓STM32H743开源飞控系列教程---(一)飞控调研与方案设计-CSDN博客
手搓STM32H743开源飞控系列教程---(二)源码下载,修改引脚定义、编译固件-CSDN博客
手搓STM32H743开源飞控系列教程---(三)物唯飞控原理图讲解、硬件引脚讲解、一键适配官方固件
手搓STM32H743开源飞控系列教程---(四) 番外~~AI问答知识库上线-CSDN博客
手搓STM32H743开源飞控系列教程---(五) 飞控IMU方向调整_STM32H743飞控传感器配置-CSDN博客
手搓STM32H743开源飞控系列教程---(六) PCB被判定为嘉立创存在拆单嫌疑怎么处理?_嘉立创 百元h743-CSDN博客
手搓STM32H743开源飞控系列教程---(七) 一文讲清所有固件烧录方法!-CSDN博客
手搓STM32H743开源飞控系列教程---(八) 固件编译视频教程:编译APM固件、编译BF固件
一、前言
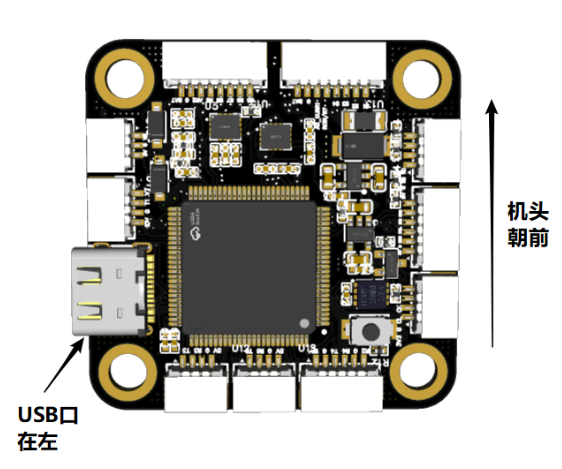
相信各位通过前面的章节,已经成功的将固件刷写到飞控硬件中了,并且晃动飞控板APM地面站或者BF的地面站也可以跟着进行晃动。但是在实际的装机过程过程中, 可能有些朋友因为线材/舱体体积/USB朝向等等问题,需要将飞控进行各种翻转/倒装/航向转90°/等等操作。 翻转之后IMU以及罗盘的默认方向会发生变化,所以本章节着重讲解如何通过地面站软件对IMU方向进行修改,对于需要批量调整的朋友也可以直接在源码处修改。
二、WFG100飞控默认的 IMU与罗盘方向
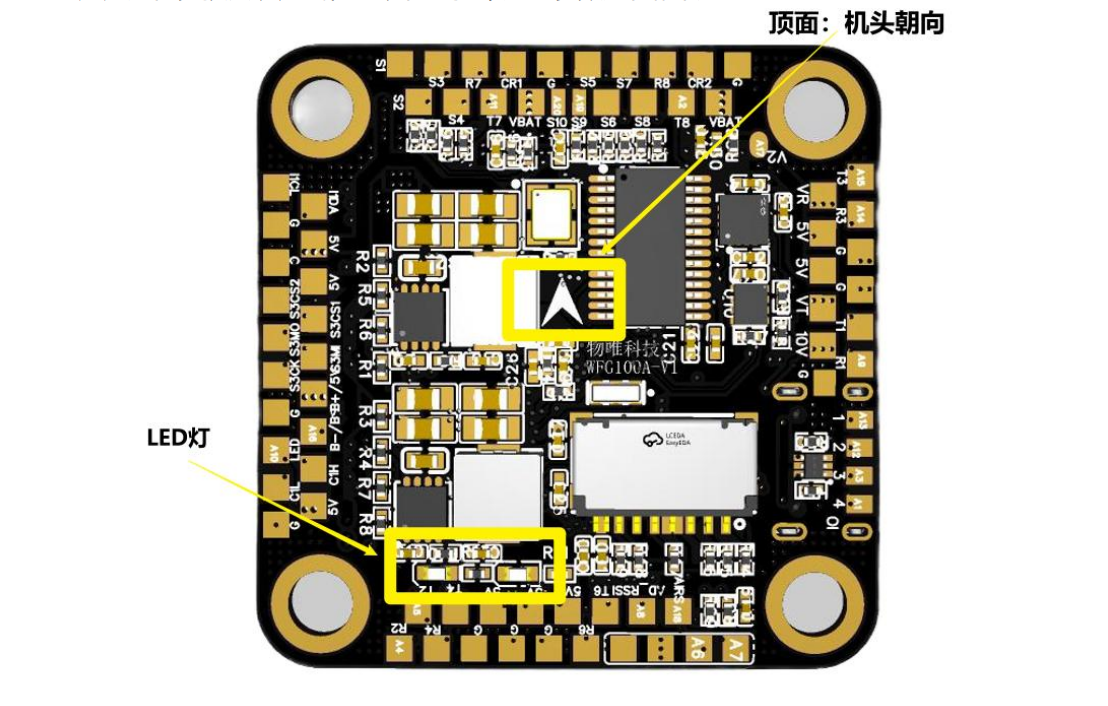
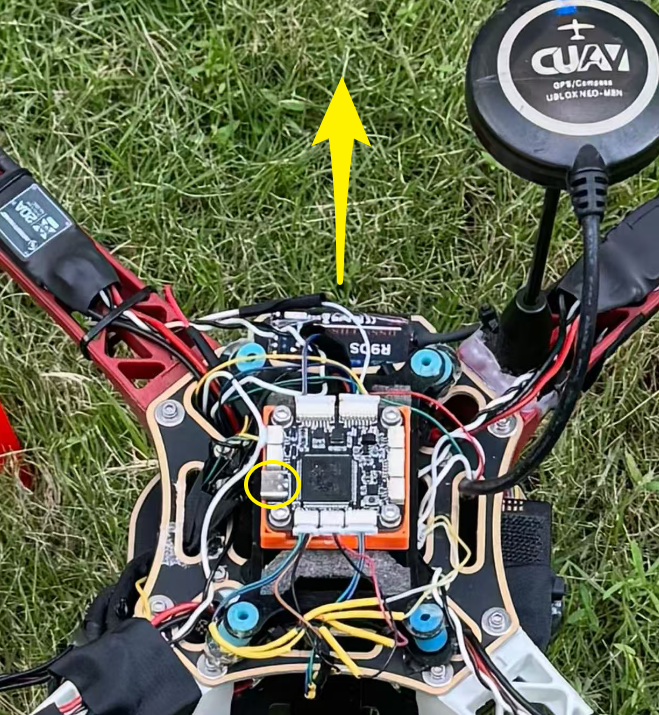
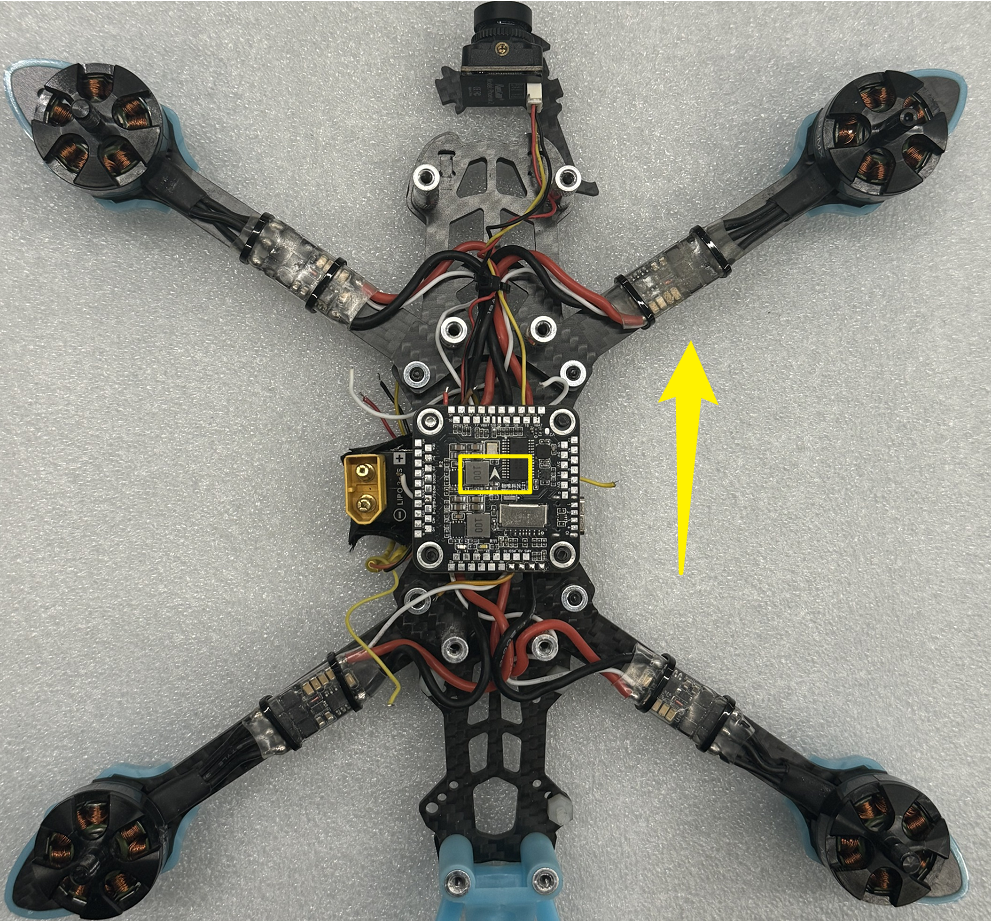
物唯飞控默认是将能看到焊盘及LED灯的那一面定义为飞控的顶面,改面上有一个三角形箭头朝前的那一端定义为机头前进(朝前)的方向,考虑到可能大家装机时看LED灯以及焊线方便。(如果如果大家觉得此举不妥,可以和我们反馈!)
物唯飞控其默认的姿态定义如下,文字不便于描述与理解,大家可以通过视频链接进行查看,
2.1 WFG100飞控APM固件的默认姿态定义
WFG100开源飞控烧录APM固件后,如何查看姿态方向?_哔哩哔哩_bilibili
2.2 WFG100飞控BF固件的默认姿态定义
WFG100开源飞控烧录BF固件后,如何查看姿态方向?_哔哩哔哩_bilibili
三、地面站修改飞控姿态方向(APM固件)
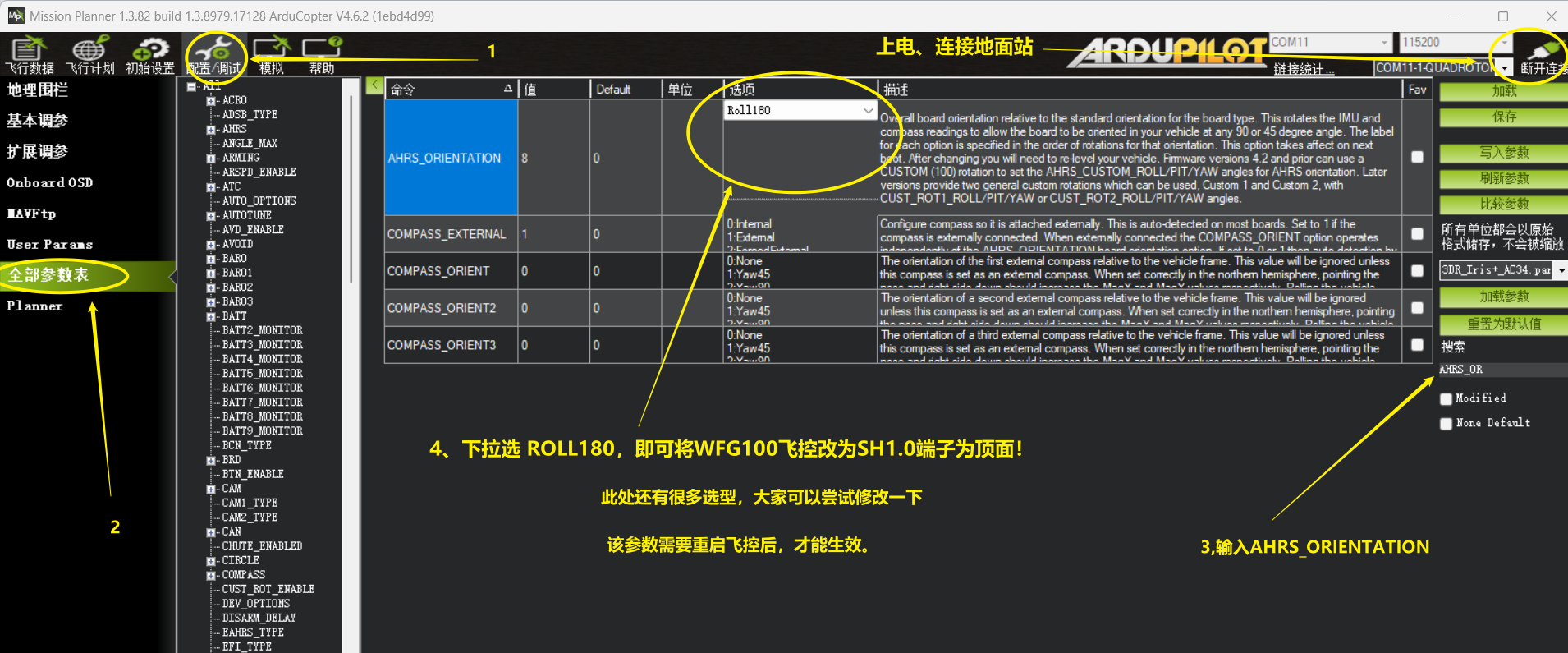
在WFG100飞控中默认是焊盘朝上为顶面,(详见本文章节二的2个视频说明)。如果我觉得这种方向定义不符合装机需求,,则可通过missionplanner地面站对飞控的IMU方向和罗盘方向进行调整,关键的参数为:AHRS_ORIENTATION。
| 焊盘面朝上装机(源码默认定义) | 端子面朝上装机(需用户修改参数) | |
| 图片示意 | 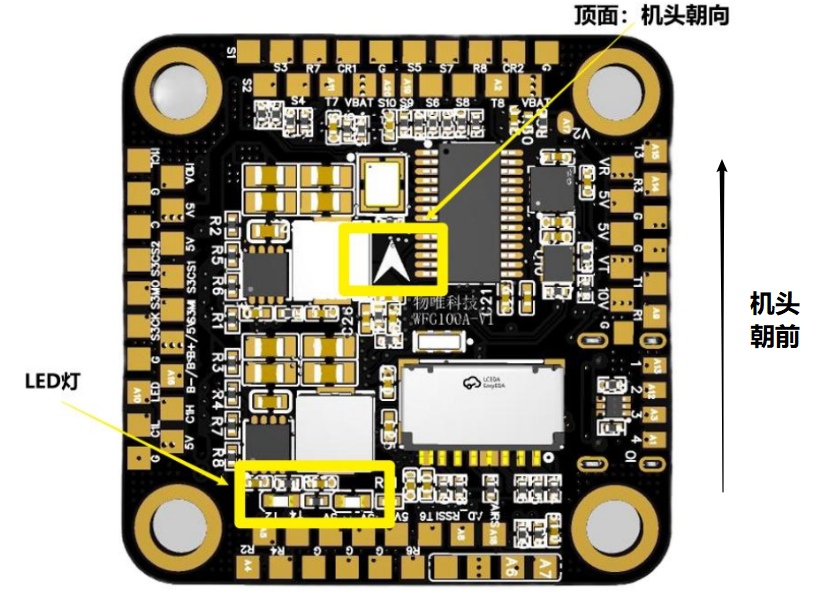 |
 |
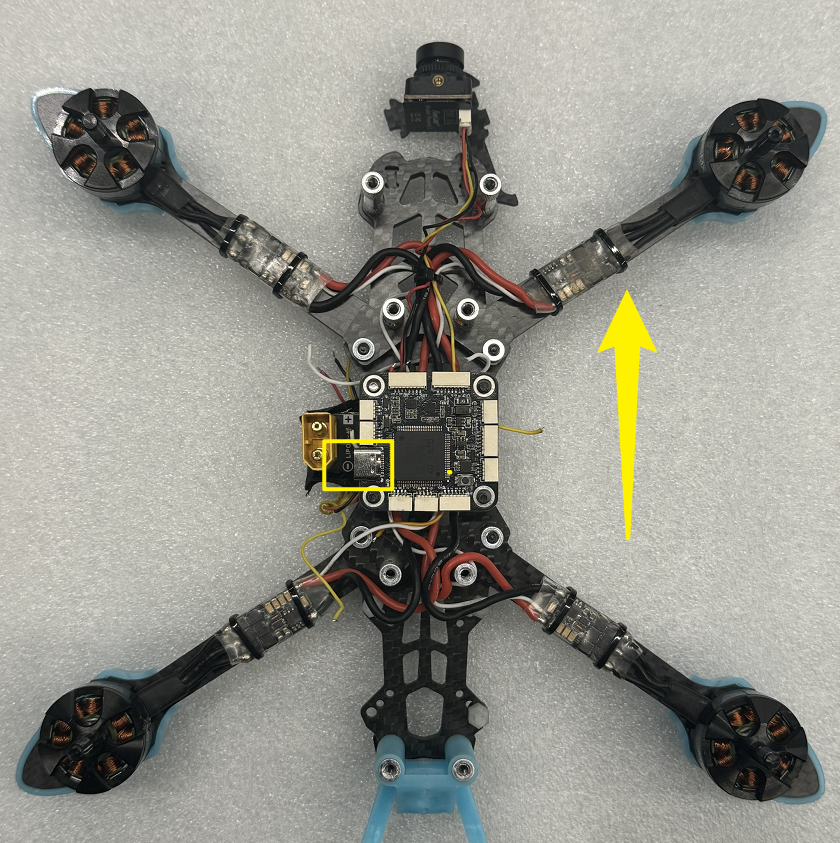
| 装机示意 | 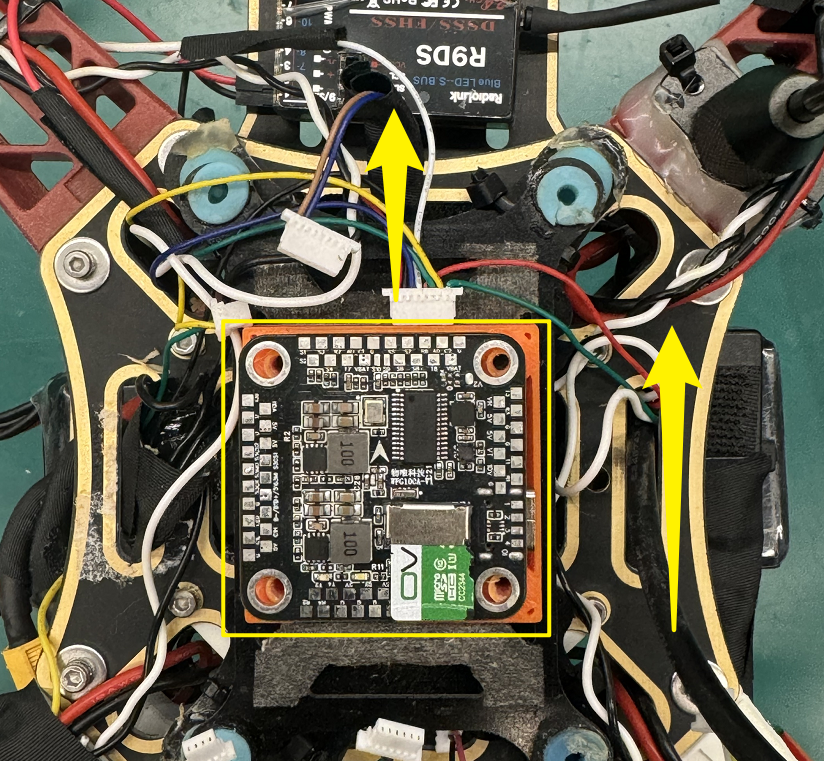 |
 |
| 参数配置 |
AHRS_ORIENTATION = 0 (默认参数,用户无需修改) |
AHRS_ORIENTATION = 8 (需要将默认=0,改为=8) |
修改方法如下:
参数写入后,重新上电连接地面站,晃动飞控确保其飞控的姿态与默认的姿态定义一致!
WFG100开源飞控烧录APM固件后,如何查看姿态方向?_哔哩哔哩_bilibili
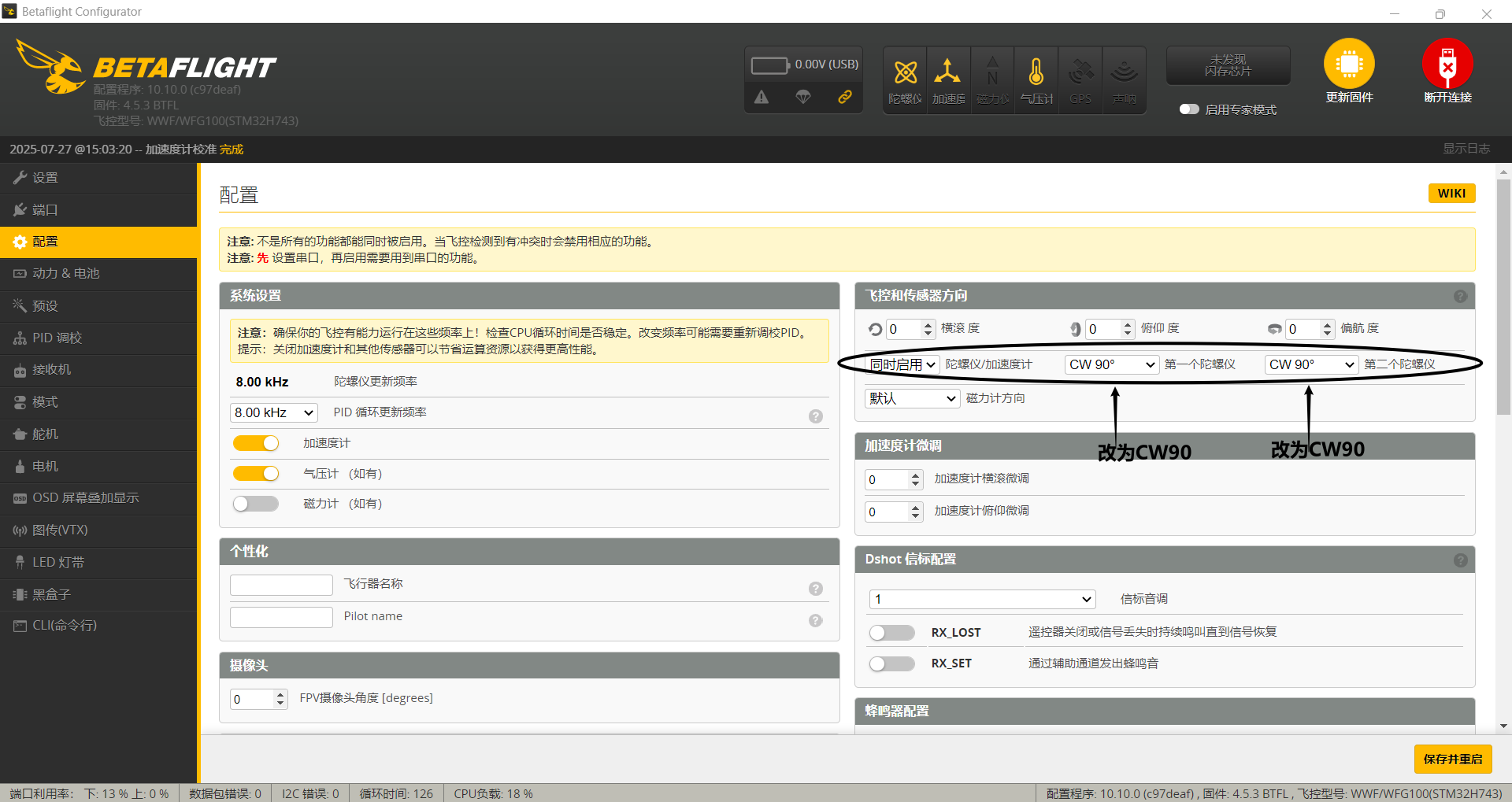
四、地面站修改飞控姿态方向(BF固件)
同样,在BF固件中也是以焊盘面朝上的方向为顶面方向,其默认姿态定义如下:
WFG100开源飞控烧录BF固件后,如何查看姿态方向?_哔哩哔哩_bilibili
4.1 默认IMU方向(焊盘朝上为顶面)
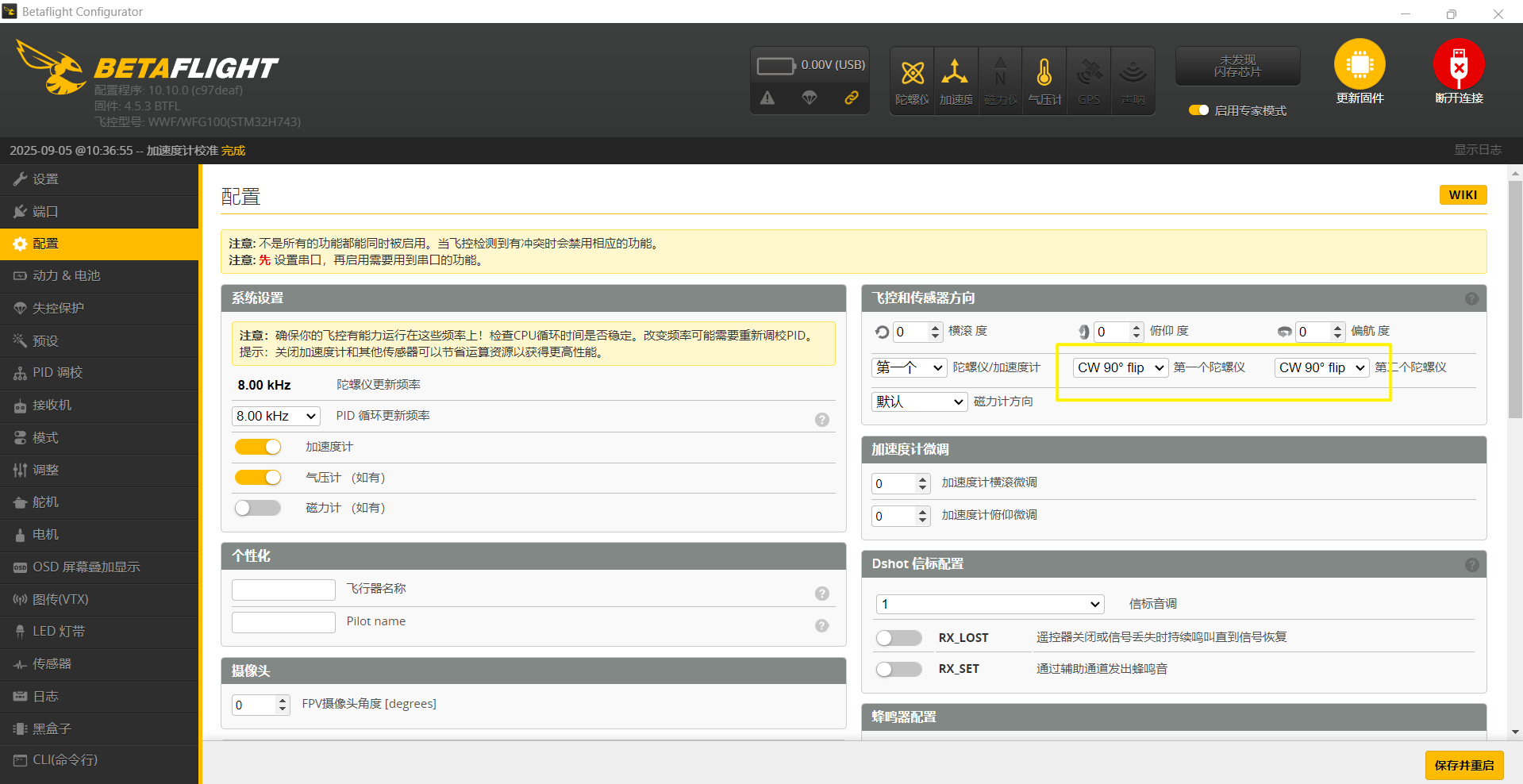
4.2 IMU方向调整(芯片朝上为顶面)
4.2 关于罗盘方向调整
在BF固件中,罗盘默认是关闭的,因为穿越机狭窄的走线布局、罗盘(特别是板载罗盘)在高速飞行中易受电机、电源干扰,导致航向数据跳变。同时我们刷写了BF固件一般都是玩穿越机居多,所以罗盘这里我们就不开启,因为也无需进行调整。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 36
36 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)