阵列导向矢量(Array Response Vector/Steering vector)
在学习这篇文献 (Xu and Zhang et al. 2022)1 的时候,发现其中有用到 Steering vector 这个概念来表示电磁波到达或者离开天线阵列的相位差。由于文章中描述不够详细,参考 (Alkhateeb 2019)3 这篇DeepMIMO 数据集中的描述,对阵列导向矢量的表达式进行一些推导。阵列导向矢量描述的是:相邻接收/发送天线之间信号的相位差。假设有如下排布的水平天线
阵列导向矢量(Array Response Vector/Steering vector)
在学习这篇文献 (Xu and Zhang et al. 2022)1 的时候,发现其中有用到 Steering vector 这个概念来表示电磁波到达或者离开天线阵列的相位差。由于文章中描述不够详细,参考 (Alkhateeb 2019)2 这篇DeepMIMO 数据集中的描述,对阵列导向矢量的表达式进行一些推导。
阵列导向矢量描述的是:相邻接收/发送天线之间信号的相位差。
ULA 均匀线阵推导
假设有如下排布的水平天线整列
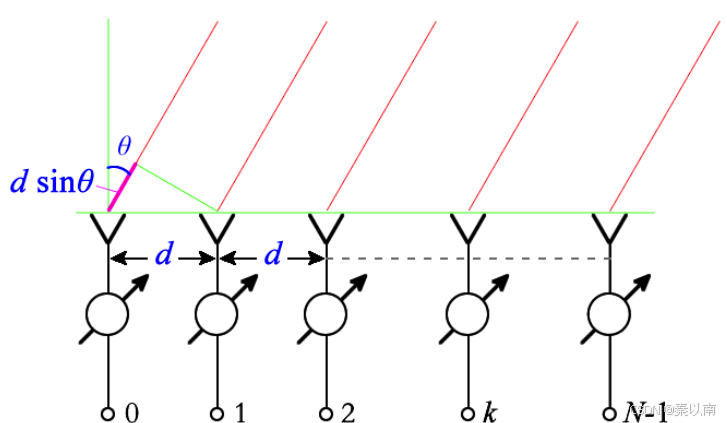
天线从左往右线性排列,编号从 0 0 0 开始,一直到 N − 1 N-1 N−1 。电磁波和法线的夹角定义为入射角 θ \theta θ,两个向量天线之间的间隔定义为 d d d。那么,可以很快速的得到图中紫色线段的长度为:
Δ L = d sin θ \Delta L = d\sin{\theta} ΔL=dsinθ
那么,第0个和第1个天线之间的相位差就可以表示为 2 π λ d sin θ \displaystyle \frac{2\pi}{\lambda}d \sin{\theta} λ2πdsinθ,由此可以得到整个天线阵列的导向矢量,以0号天线为参考点,表示为指数形式
a = [ 1 , e j 2 π λ d sin θ , ⋯ , e j 2 π λ d ( N − 1 ) sin θ ] T \mathbf{a} =\left[ 1, e^{j\frac{2\pi}{\lambda}d\sin{\theta}}, \cdots, e^{j\frac{2\pi}{\lambda}d\left( N - 1 \right)\sin{\theta}} \right]^T a=[1,ejλ2πdsinθ,⋯,ejλ2πd(N−1)sinθ]T
UPA 均匀平面阵
如下图所示,在 z o y zoy zoy 平面上,放置有一个 M H × M V M_H \times M_V MH×MV 大小,各部分间距为 d H = d V = d d_H = d_V = d dH=dV=d 的平面天线整列。入射的平面波,方位角为 φ \varphi φ ,俯仰角为 θ \theta θ,图中表示为 k ( φ , θ ) \mathbf{k} \left( \varphi, \theta \right) k(φ,θ)。
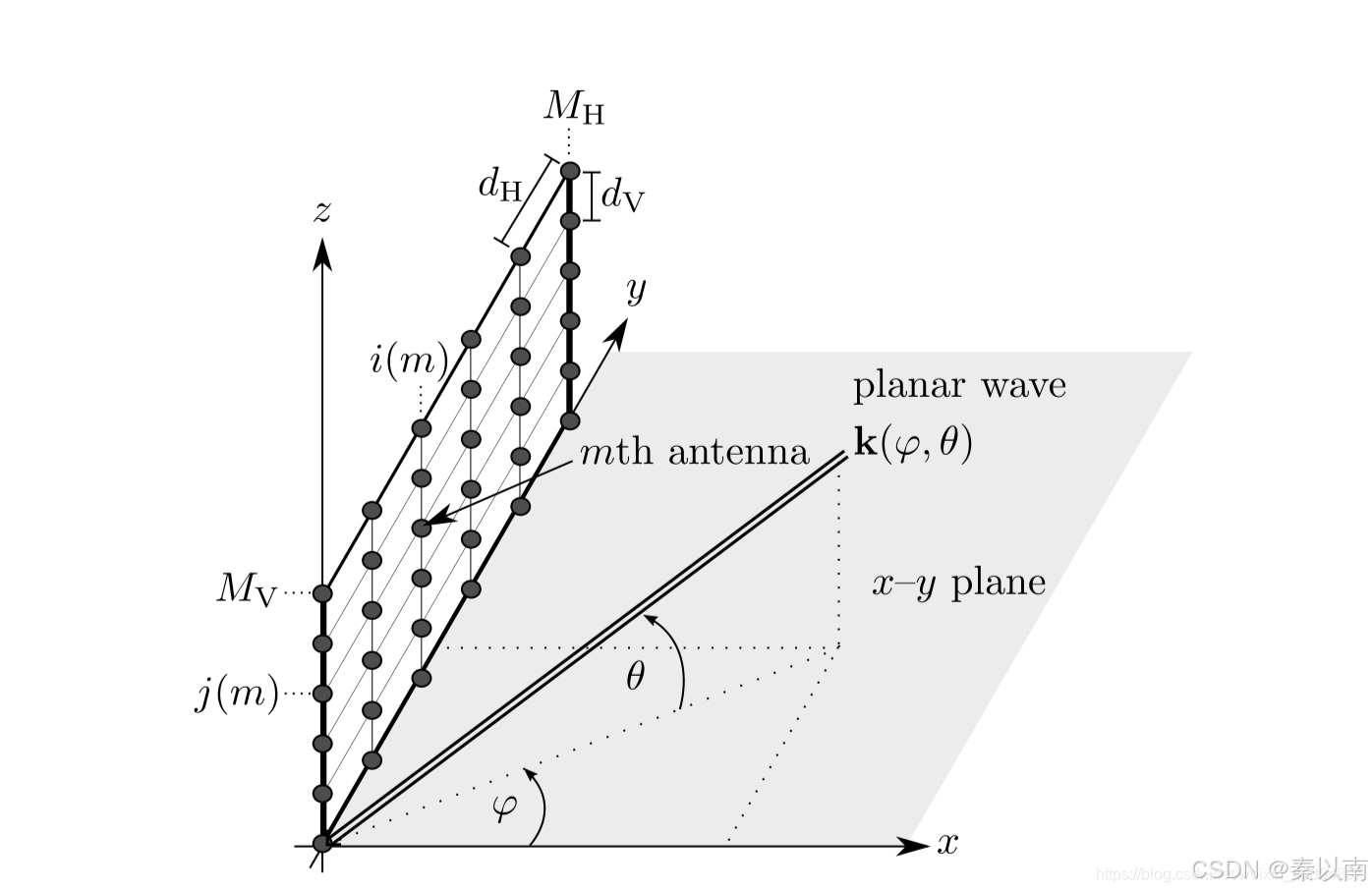
z z z 轴方向(Vertical Axis)
从图中可以看出,相邻两个天线所接收到的电磁波的路径差值为 d sin θ d\sin\theta dsinθ。因此,和上面的线性阵列同理,在 z z z 轴方向上,相邻两个天线所接收到的电磁波的相位的差值也为 Δ ϕ z = 2 π λ d sin θ \displaystyle \Delta \phi_z = \frac{2\pi}{\lambda}d \sin{\theta} Δϕz=λ2πdsinθ
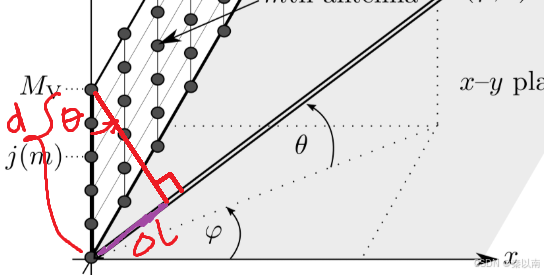
y y y 轴方向(Horizontal Axis)
从图中可以看出,在 y y y 轴方向上,传播路程的差值就是紫色线段的长度!我们只需要求解到这个紫色线段 O H \mathrm{OH} OH 的长度就好啦~
在 △ O H G \triangle \mathrm{OHG} △OHG 中, O H O G = cos γ \displaystyle \frac{\mathrm{OH}}{\mathrm{OG}}=\cos {\gamma} OGOH=cosγ。同理,在 △ O K G \triangle \mathrm{OKG} △OKG 中, O G O K = cos γ \displaystyle \frac{\mathrm{OG}}{\mathrm{OK}}=\cos {\gamma} OKOG=cosγ。由此可得
O H d = b a 2 + b 2 + c 2 \frac{\mathrm{OH}}{d} = \frac{b}{\sqrt{a^2 + b^2 + c^2}} dOH=a2+b2+c2b
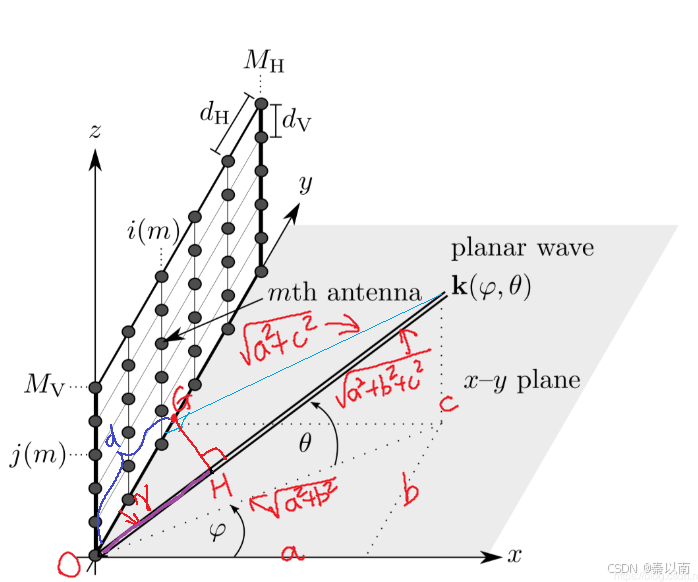
因为, sin φ = b a 2 + b 2 \displaystyle \sin \varphi = \frac{b}{\sqrt{a^2 + b^2}} sinφ=a2+b2b 并且 cos θ = a 2 + b 2 a 2 + b 2 + c 2 \displaystyle \cos \theta = \frac{\sqrt{a^2+b^2}}{\sqrt{a^2 + b^2 + c^2}} cosθ=a2+b2+c2a2+b2。因此,紫色线段 O H \mathrm{OH} OH 的长度就可以直接得到了
O H = d sin φ cos θ \mathrm{OH} = d\sin\varphi\cos\theta OH=dsinφcosθ
则这两个水平天线之间的相位差为
Δ ϕ y = 2 π λ d sin φ cos θ \Delta \phi_y = \frac{2\pi}{\lambda} d \sin\varphi\cos\theta Δϕy=λ2πdsinφcosθ
综合 z z z 轴方向和 y y y 轴方向
把两个方向上的相位差联合起来看,如果两个天线之间,在水平方向上间隔 M H − 1 M_H - 1 MH−1,在竖直方向上间隔 M V − 1 M_V - 1 MV−1(也就是原点的天线和右上角的天线),则他们之间的相位差可以表示为
Δ ϕ = ( M H − 1 ) Δ ϕ y + ( M V − 1 ) Δ ϕ z \Delta \phi = (M_H - 1)\Delta \phi_y + (M_V - 1)\Delta \phi_z Δϕ=(MH−1)Δϕy+(MV−1)Δϕz
转为指数形式,就是
Δ ϕ = e j 2 π λ d ( M H − 1 ) sin φ cos θ e j 2 π λ d ( M V − 1 ) sin θ = a z ( k ) a y ( j ) \Delta \phi = e^{j\frac{2\pi}{\lambda}d\left( M_H - 1\right)\sin\varphi\cos\theta}e^{j\frac{2\pi}{\lambda}d\left( M_V - 1\right)\sin\theta} = \mathrm{a}_z(k)\mathrm{a}_y(j) Δϕ=ejλ2πd(MH−1)sinφcosθejλ2πd(MV−1)sinθ=az(k)ay(j)
这里, k k k 和 j j j 分别代表了 z z z 轴方向和 y y y 轴方向的导向矢量的下标序号。
由此可见,当我们给出 z z z 轴方向和 y y y 轴方向的导向矢量后,整体的导向矢量可以方便地用克罗内克积(Kronecker product)求得。
z z z 轴方向的导向矢量为
a z = [ 1 , e j 2 π λ d sin θ , ⋯ , e j 2 π λ d ( M V − 1 ) sin θ ] T \mathbf{a}_z =\left[ 1, e^{j\frac{2\pi}{\lambda}d\sin{\theta}}, \cdots, e^{j\frac{2\pi}{\lambda}d\left( M_V - 1 \right)\sin{\theta}} \right]^T az=[1,ejλ2πdsinθ,⋯,ejλ2πd(MV−1)sinθ]T
y y y 轴方向的导向矢量为
a y = [ 1 , e j 2 π λ d sin φ cos θ , ⋯ , e j 2 π λ d ( M H − 1 ) sin φ cos θ ] T \mathbf{a}_y =\left[ 1, e^{j\frac{2\pi}{\lambda}d\sin\varphi\cos\theta}, \cdots, e^{j\frac{2\pi}{\lambda}d\left( M_H - 1\right)\sin\varphi\cos\theta} \right]^T ay=[1,ejλ2πdsinφcosθ,⋯,ejλ2πd(MH−1)sinφcosθ]T
由此可得,整个UPA的导向矢量为
a = a z ⊗ a y \mathbf{a} = \mathbf{a}_z \otimes \mathbf{a}_y a=az⊗ay
-
G5H8WEBY
User Data3
Title: Deep Learning-Based Time-Varying Channel Estimation for RIS Assisted Communication
Author: M. Xu, S. Zhang, J. Ma, O. A. Dobre
Year: 2022
Abstract
Select on Zotero
zotero
Files
[Open] | [PDF](file://C:\Users\elysia\Zotero\storage\VG787CM7\Xu%20等%20-%202022%20-%20Deep%20Learning-Based%20Time-Varying%20Channel%20Estimation%20for%20RIS%20Assisted%20Communication.pdf)
Note
User Data
↩︎ -
AHSJ9TG9
User Data4
Title: DeepMIMO: A Generic Deep Learning Dataset for Millimeter Wave and Massive MIMO Applications
Author: Ahmed Alkhateeb
Year: 2019
Abstract
Select on Zotero
zotero
Files
[Open] | [PDF](file://C:\Users\elysia\Zotero\storage\YAPHHTA9\Alkhateeb%20-%202019%20-%20DeepMIMO%20A%20Generic%20Deep%20Learning%20Dataset%20for%20Millimeter%20Wave%20and%20Massive%20MIMO%20Applications.pdf)
Note
User Data
↩︎
-
User Data
↩︎ -
User Data
↩︎

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)