时钟信号抖动的定义和测量方法
例如,前4个时钟周期的周期恒定为990皮秒,因此“周期变化”图是平坦的;长期抖动不同于周期抖动和逐周期抖动,因为它代表了在长时间间隔内,抖动对连续时钟周期流的累积效应。周期抖动是指在多个随机选择的周期内,时钟信号的周期时间相对于理想周期的偏差。例如,如果从10,000个随机样本计算出的RMS值为10皮秒,那么Error_RMS将为0.071皮秒,实际上该测量的所有RMS值仍将落在10±0.213皮
1 简介
抖动是一组信号边沿相对于其理想值的时序变化。时钟信号中的抖动通常由系统中的噪声或其他干扰引起。影响因素包括热噪声、电源电压波动、负载条件、器件噪声以及从附近电路耦合的干扰。
2 抖动类型
抖动可以通过多种方式测量,以下是主要的抖动类型:
-
周期抖动
-
逐周期周期抖动
-
长期抖动
-
相位抖动
-
时间间隔误差(TIE)
2.1 周期抖动
周期抖动是指在多个随机选择的周期内,时钟信号的周期时间相对于理想周期的偏差。如果得到多个单独的时钟周期,就可以测量每个周期,并计算平均时钟周期、标准偏差和峰峰值。标准偏差和峰峰值通常分别称为均方根(RMS)值和峰-峰(Pk-Pk)周期抖动。
许多出版物将周期抖动定义为测量的时钟周期与理想周期之间的差值。在实际应用中,通常很难量化理想周期。如果使用示波器观察设置为100 MHz的振荡器的输出,测量的平均时钟周期可能是9.998纳秒,而不是10纳秒。因此,将平均周期视为理想周期通常更实际。
2.1.1 周期抖动应用
周期抖动在计算数字系统的时序裕量时很有用。考虑一个基于微处理器的系统,其中处理器要求在时钟上升沿之前有1纳秒的数据建立时间。如果时钟的周期抖动为-1.5纳秒,那么时钟的上升沿可能在数据有效之前出现。因此,微处理器将接收到不正确的数据。此示例如图1所示。
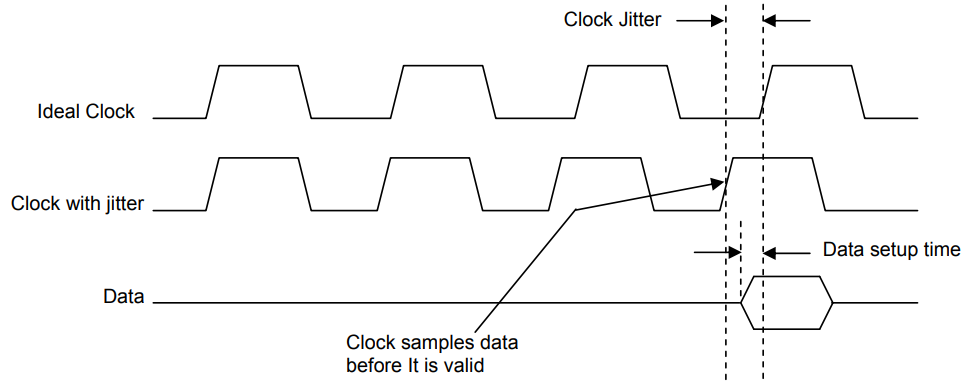
图1 由时钟抖动引起的data setup time违规
同样,如果另一个微处理器的数据保持时间要求为2纳秒,但现在时钟抖动为+1.5纳秒,那么数据保持时间实际上会减少到0.5纳秒。微处理器将再次看到不正确的数据。这种情况如图2所示。
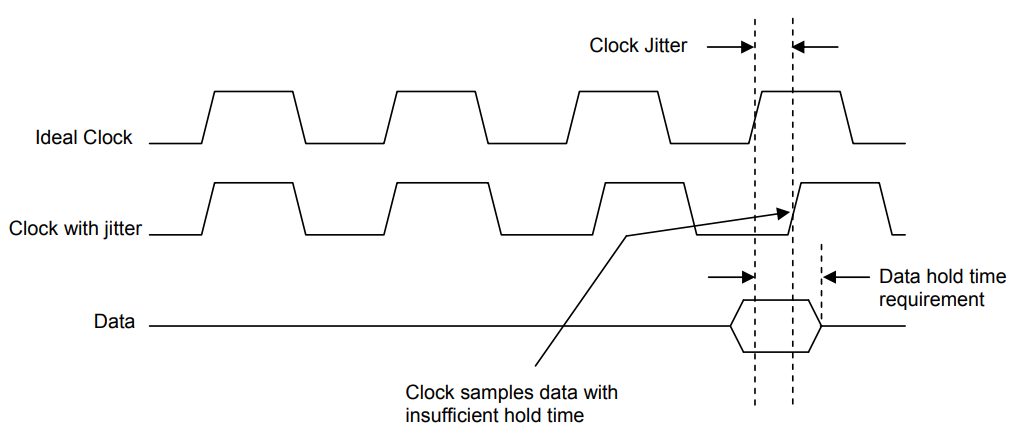
图2 由时钟抖动引起的data hold time违规
2.1.2 从RMS抖动计算峰峰值抖动
由于时钟的周期抖动本质上是具有高斯分布的随机量,因此可以用皮秒(pS)为单位的均方根(RMS)值来完全表示。然而,峰峰值在计算建立时间和保持时间预算时更为相关。对于样本数量为10,000的情况,读者可以使用以下公式将RMS抖动转换为峰峰值(Pk-Pk)抖动:
![]()
例如,如果RMS抖动为3皮秒,峰峰值抖动为±11.16皮秒。、
表1. 高斯概率密度函数(PDF)

公式1源自高斯概率密度函数(PDF)表。例如,如果样本数量为100,99个样本将落在分布均值的±2.327σ范围内,平均只有1个样本会落在该区域之外。SiTime按照JEDEC标准在10,000个样本上测量RMS周期抖动。
2.1.3 周期抖动测量方法
JEDEC标准65B将周期抖动定义为在多个随机选择的周期内,信号的周期时间相对于理想周期的偏差。JEDEC标准进一步规定,周期抖动应在10,000个周期的样本上进行测量。建议使用以下步骤测量周期抖动:
-
测量一个时钟周期的持续时间(上升沿到上升沿)。
-
等待随机数量的时钟周期。
-
重复上述步骤1,共10,000次。
-
从10,000个样本中计算均值、标准偏差(σ)和峰峰值。
-
重复上述测量25次。从25组结果中计算平均峰峰值。
从10,000个随机样本的测量中计算出的标准偏差(σ)或RMS值非常准确。RMS值的误差可以使用以下公式计算:
其中,σₙ是采集样本的RMS(或西格玛),N是样本数量。对于样本数量为10,000的情况,Error_RMS为0.0071σₙ。该误差是随机的,遵循高斯分布。最坏情况下的测量误差通常计算为±3 Error_RMS。
例如,如果从10,000个随机样本计算出的RMS值为10皮秒,那么Error_RMS将为0.071皮秒,实际上该测量的所有RMS值仍将落在10±0.213皮秒的窄范围内。在实际应用中,10,000个样本集的RMS误差足够小,可以忽略不计。
虽然可以从随机的10,000个样本集中计算出准确的RMS值,但峰峰值更难测量。由于周期抖动的随机特性,样本数量越大,在分布曲线远端采集到数据点的概率就越高。换句话说,随着采集的样本越多,峰峰值会发散而不是收敛。这就是为什么添加了额外的步骤5,以产生更一致和可重复的峰峰值测量。
每次对10,000个随机样本的测量(步骤4)会产生一个标准偏差值和一个峰峰值。通过随机重复该过程25次,可以收集一组良好的数据点,从中可以高度准确地计算平均峰峰值。也可以从该数据中计算平均RMS值,但它将非常接近每次单独运行得出的RMS值。
图3是某振荡器在125 MHz下运行的周期抖动直方图。它代表了从10,000个样本(步骤4)测量的一组RMS和峰峰值。
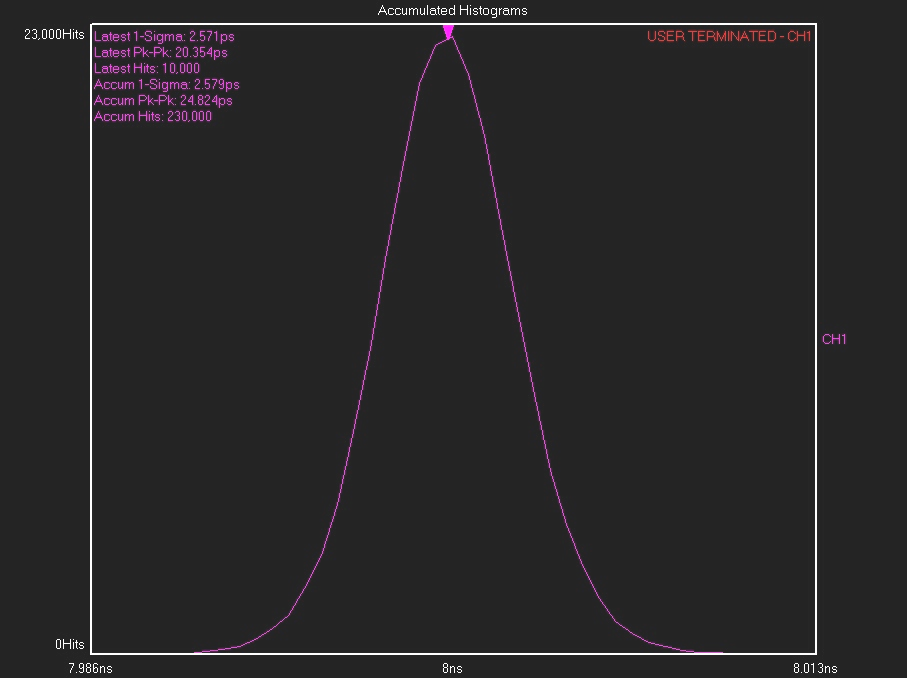
图3 10000次周期抖动测量的直方图
2.2 逐周期抖动
JEDEC标准65B将逐周期(C2C)抖动定义为在随机样本的相邻周期对中,信号相邻周期之间的周期时间变化。JEDEC标准进一步规定,每个样本数量应大于或等于1,000。请注意,逐周期抖动仅涉及两个连续周期之间的周期差,不参考理想周期。
逐周期抖动通常以皮秒为单位的峰值报告,该峰值定义了任何两个连续时钟的上升沿之间的最大偏差。这种类型的抖动规范通常用于说明扩频时钟的稳定性,因为周期抖动对频率扩展特性更敏感,而C2C抖动则不然。逐周期抖动有时也以皮秒为单位的RMS值表示。
2.2.1 逐周期抖动测量方法
建议使用以下步骤测量逐周期抖动:
-
测量两个相邻时钟周期的周期时间,T1和T2。
-
计算T1-T2的值。记录该数字的绝对值。
-
等待随机数量的时钟周期。
-
重复上述步骤1、2,共1,000次。
-
从1,000个样本中计算标准偏差(σ)和峰值。峰值是数据集中最大的绝对(T1-T2)数。
-
重复上述测量25次,并从25组结果中计算平均峰值。
与峰-峰周期抖动类似,逐周期抖动的峰值也会随着采集更多样本而发散,而不是收敛。程序中的步骤6是为了从25个样本集获得平均峰值C2C抖动。
图4是逐周期抖动直方图的一个示例。在这种情况下,逐周期抖动的峰值为25.66皮秒(两个数字中的较大者:21.22皮秒和-25.66皮秒以绝对值形式表示)。
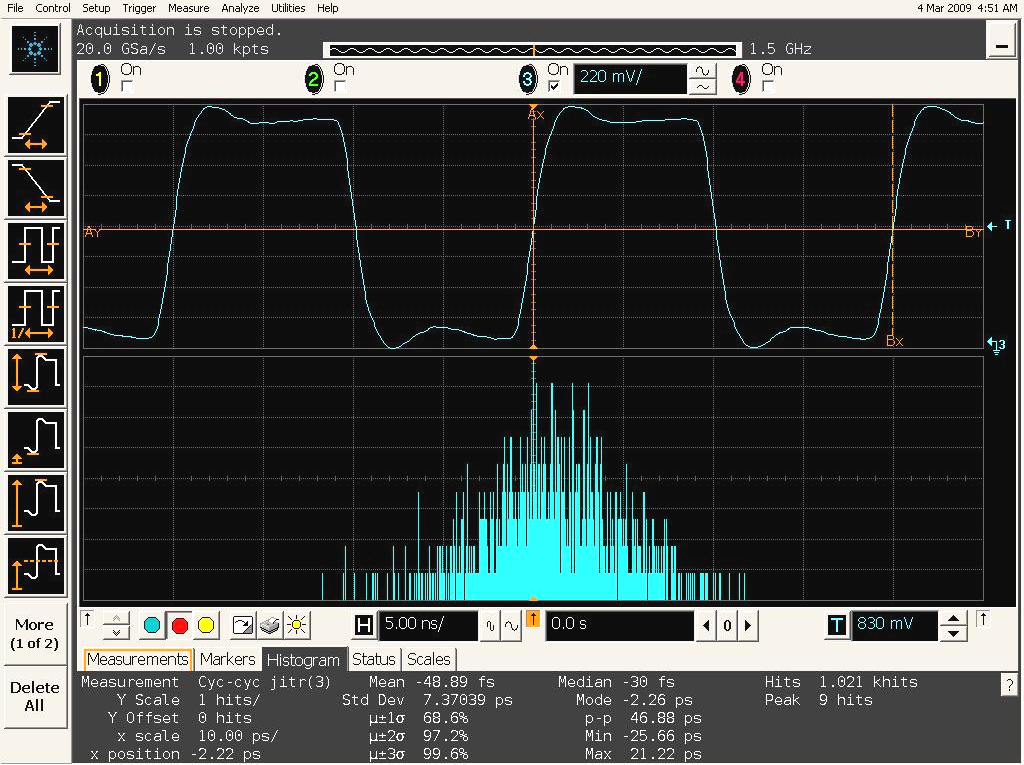
图4 周期到周期抖动cycle to cycle jitter直方图
2.3 长期抖动
长期抖动测量的是时钟输出在多个连续周期内相对于理想位置的变化。测量中使用的实际周期数取决于应用。长期抖动不同于周期抖动和逐周期抖动,因为它代表了在长时间间隔内,抖动对连续时钟周期流的累积效应。这就是为什么长期抖动有时被称为累积抖动。长期抖动通常在图形/视频显示和远程遥测应用(如测距仪)中有用。建议使用以下方法测量长期抖动;在本示例中,在10,000个时钟上测量长期抖动。
-
测量10,000个连续时钟周期的时间间隔,如图5所示。
-
等待随机数量的时钟周期。
-
重复上述步骤1,共1,000次。
-
从1,000个样本中计算均值、标准偏差(σ)和峰峰值。
-
重复上述测量25次。从25组结果中计算平均峰峰值。
同样,步骤5是需要的,以克服峰峰值的无界性质。
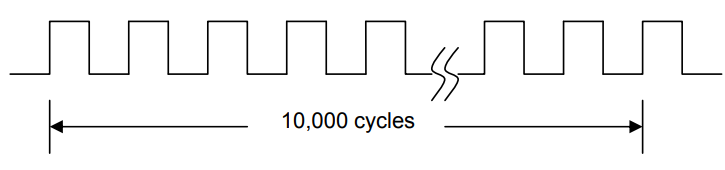
图5 测量一个10000个时钟周期的时间间隔
2.4 相位抖动
相位噪声通常描述为不同频率偏移处的一组噪声值(例如,20KHz处为-60 dBc/Hz,10MHz处为-95 dBc/Hz),或作为在一定频率范围内的连续噪声图。相位抖动是在特定频谱上对相位噪声的积分,并以秒为单位表示。
在方波中,大部分能量位于载波频率。然而,一些信号能量会在载波两侧的一定频率范围内“泄漏”。相位抖动是相对于载波(fc)在两个偏移频率之间包含的相位噪声能量的量。图6是未滤波的相位噪声图,阴影区域表示频率f1和f2之间的相位抖动。
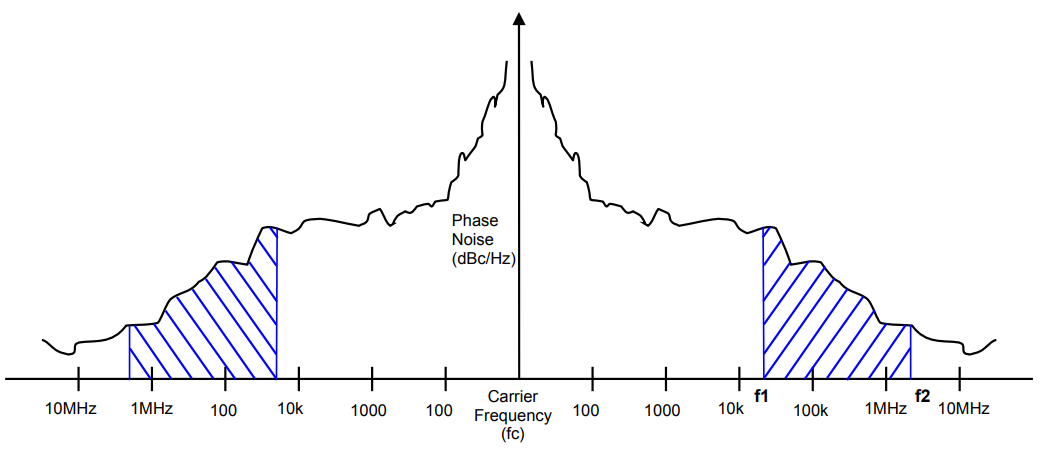
图6 相位噪声曲线
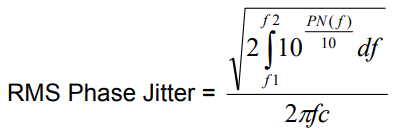
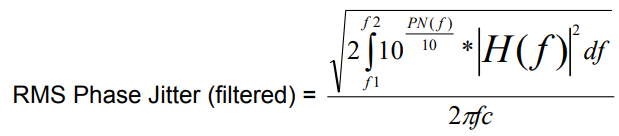
f1和f2之间的RMS相位抖动由公式3定义。
在通信应用中,在计算最终的RMS相位抖动值之前,将组合的发射PLL和接收PLL的带通滤波器效应应用于原始相位噪声数据。以下是常见应用及其相关滤波器的带宽(转折频率):
-
光纤通道:637 KHz至10 MHz
-
10吉比特以太网XAUI:1.875 MHz至20 MHz
-
SATA/SAS:900 KHz至7.5 MHz
如果滤波器函数为H(f),则滤波后的RMS相位抖动可以使用公式4计算。
3 时间间隔误差(TIE)
边沿的时间间隔误差(TIE)是该边沿相对于从参考点测量的理想位置的时间偏差。实际上,TIE是以秒或皮秒为单位表示的相位噪声的离散时域表示。图7说明了TIE的基本概念。理想信号通常是通过软件从信号周期的平均估计中创建的信号。
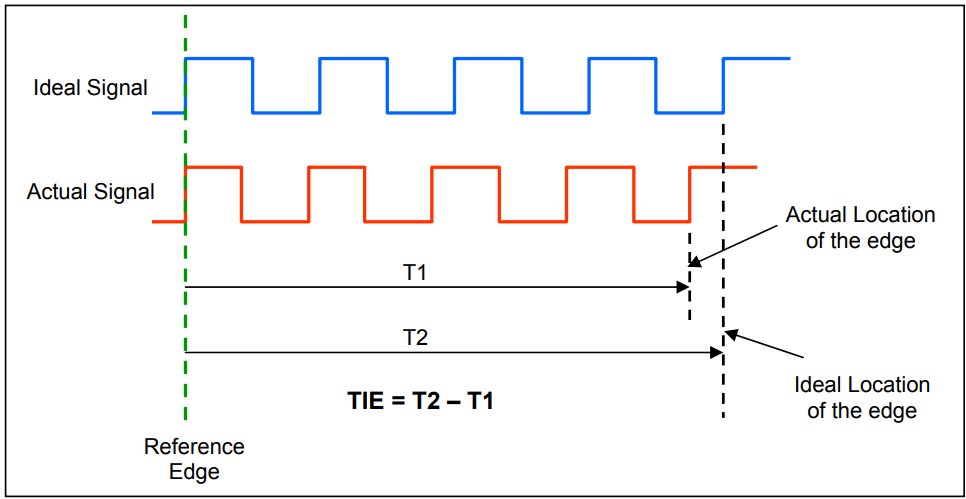
图7 TIE概念定义
3.1 随时间绘制TIE
图8顶部显示了一个时钟波形。红色脉冲是完美定时的时钟周期,持续时间正好为1000皮秒。黑色脉冲是带有抖动的时钟周期。这些时钟脉冲的后沿已被移除,以增强显示效果。在序列开始时,红色和黑色时钟彼此对齐。由于抖动,黑色时钟边沿将开始随时间偏移,有时出现在红色时钟边沿之前,有时之后。
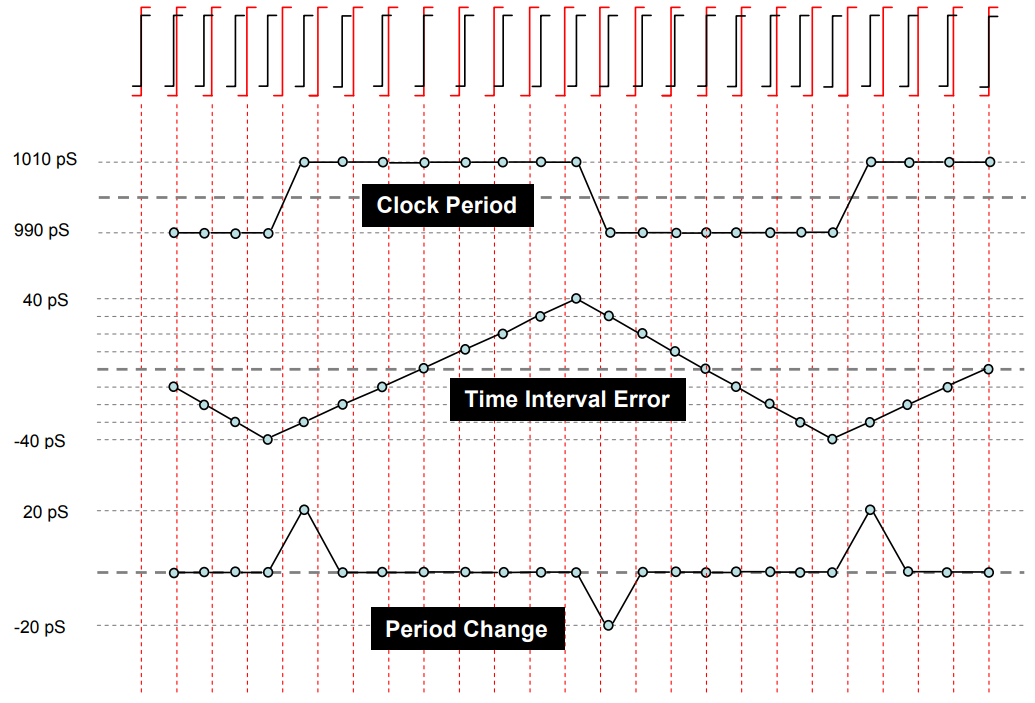
图8 Time interval error (TIE) 曲线
标记为“时钟周期”的图表示随时间测量的黑色时钟周期。在本示例中,黑色时钟周期为990皮秒或1010皮秒。“周期变化”图描绘了每个周期相对于前一个周期的变化。只要两个连续黑色时钟之间的周期保持不变,该图就保持平坦。然而,每当检测到周期差时,它就会记录变化。例如,前4个时钟周期的周期恒定为990皮秒,因此“周期变化”图是平坦的;但当第5个时钟的周期从990皮秒延长到1010皮秒时,该图通过跳到+20皮秒位置来报告此变化。换句话说,该图识别了“时钟周期”图中显示的周期变化。
“时间间隔误差”(TIE)图记录了理想边沿(红色时钟)和实际边沿(黑色时钟)之间的累积误差。在本示例中,TIE图开始向负方向移动,因为前4个时钟每个都比理想周期短10纳秒。在累积了-40皮秒的抖动误差后,该图在第5个时钟处改变方向并向正方向移动,因为第5个时钟周期比理想周期长10皮秒。
TIE测量在检查传输数据流的行为时特别有用,其中参考时钟通常使用时钟/数据恢复(CDR)电路从数据信号中恢复。较大的TIE值可能表明CDR中的PLL响应数据流变化的比特率太慢。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 5
5 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)