STM32HAL 快速入门(五):CubeMX 生成 GPIO 初始化代码深度解析
摘要:本文深入解析了STM32点灯程序中的GPIO初始化代码,重点剖析了CubeMX生成的MX_GPIO_Init函数。通过逐层拆解GPIO配置结构体GPIO_InitTypeDef,详细说明了引脚选择、推挽输出模式、上下拉配置和速率设置等参数如何转化为底层寄存器操作。特别分析了HAL_GPIO_Init函数如何通过计算GPIOC基地址(0x40011000)和操作CRH寄存器(PC13为13号引
前言
大家好,这里是 Hello_Embed。上一篇我们吃透了 GPIO 的硬件原理和工作模式,这一篇就来 “拆解” CubeMX 生成的初始化代码 —— 以点灯程序中的MX_GPIO_Init函数为例,看看这些代码是如何将硬件配置 “翻译” 成可执行的 C 语言指令的。理解这部分内容需要一定的 C 语言基础(结构体、宏定义)和寄存器知识(前面笔记提到的 CRL/CRH、BSRR 等),耐心跟着步骤拆解,就能彻底揭开 HAL 库的面纱,明白 “软件配置” 与 “硬件操作” 的对应关系。
一、从MX_GPIO_Init函数说起:整体框架
CubeMX 生成的 GPIO 初始化函数MX_GPIO_Init是配置 GPIO 的核心,我们先看完整代码,再逐句解析:
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0}; // 定义并初始化配置结构体
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE(); // 使能GPIOC时钟
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); // 初始化为低电平
/*Configure GPIO pin : PC13 */
GPIO_InitStruct.Pin = GPIO_PIN_13; // 引脚13
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 无上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;// 低速模式
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct); // 应用配置
}
这个函数看似简短,却包含了 GPIO 配置的所有关键步骤:使能时钟→设置初始电平→配置模式参数→应用配置。下面我们一步步拆解,看看每一行代码对应底层的什么操作。
二、GPIO_InitTypeDef:配置参数的 “载体”
代码第一行GPIO_InitTypeDef GPIO_InitStruct = {0};定义了一个结构体变量,它是传递配置参数的核心。我们先通过 “F12 跳转定义” 看看这个结构体的原型:
typedef struct
{
uint32_t Pin; // 引脚编号
uint32_t Mode; // 工作模式
uint32_t Pull; // 上拉/下拉配置
uint32_t Speed; // 输出速率
} GPIO_InitTypeDef;
这四个成员正好对应上一篇笔记提到的 “操作 GPIO 的四步”:选择引脚(Pin)→设置模式(Mode)→配置上下拉(Pull)→设定速率(Speed)。= {0}表示将结构体所有成员初始化为 0,避免未赋值成员的随机值影响配置。
三、逐成员解析:结构体如何 “描述” 硬件配置?
我们通过GPIO_InitStruct的成员赋值,看看代码如何对应硬件需求(以 PC13 配置为推挽输出为例)。
1. GPIO_InitStruct.Pin = GPIO_PIN_13;:选择引脚
跳转GPIO_PIN_13的定义,发现它是一个宏:
#define GPIO_PIN_13 ((uint16_t)0x2000)
将0x2000转为二进制是0010 0000 0000 0000,第 13 位(从 0 开始数)为 1,正好对应 PC13 引脚 —— 这意味着 “选择引脚” 的本质是通过二进制位 “标记” 目标引脚,后续配置会基于这个标记操作对应位。
2. GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;:设置输出模式
跳转GPIO_MODE_OUTPUT_PP的定义,宏定义如下:
#define GPIO_MODE_INPUT 0x00000000u // 输入模式
#define GPIO_MODE_OUTPUT_PP 0x00000001u // 推挽输出
#define GPIO_MODE_OUTPUT_OD 0x00000011u // 开漏输出
#define GPIO_MODE_AF_PP 0x00000002u // 复用推挽
#define GPIO_MODE_AF_OD 0x00000012u // 复用开漏
#define GPIO_MODE_AF_INPUT GPIO_MODE_INPUT // 复用输入
GPIO_MODE_OUTPUT_PP的值为0x00000001u(u表示无符号整型),这个值会被用于配置 CRH/CRL 寄存器的CNF位(控制模式类型),对应上一篇提到的 “推挽输出” 硬件配置。
3. GPIO_InitStruct.Pull = GPIO_NOPULL;:配置上下拉
跳转定义可知,上下拉通过宏区分:
#define GPIO_NOPULL 0x00000000u // 无上下拉
#define GPIO_PULLUP 0x00000001u // 上拉
#define GPIO_PULLDOWN 0x00000002u // 下拉
这里选择GPIO_NOPULL,表示不启用内部上拉 / 下拉电阻,对应 PC13 作为输出引脚时无需上下拉的需求(LED 控制无需外部电平拉拽)。
4. GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;:设定输出速率
速率宏定义如下:
#define GPIO_SPEED_FREQ_LOW (GPIO_CRL_MODE0_1)
#define GPIO_SPEED_FREQ_MEDIUM (GPIO_CRL_MODE0_0)
#define GPIO_SPEED_FREQ_HIGH (GPIO_CRL_MODE0)
跳转GPIO_CRL_MODE0_1发现其值为(0x2UL << GPIO_CRL_MODE0_Pos)(UL表示无符号长整型),对应 CRH/CRL 寄存器的MODE位 —— 低速模式(最大 2MHz)可减少电磁干扰,适合 LED 这类对速率无要求的场景。
四、HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);:应用配置的核心
结构体成员赋值完成后,通过HAL_GPIO_Init函数将配置应用到硬件,我们重点解析两个参数和函数内部的关键操作。
1. 第一个参数GPIOC:GPIO 组的地址
跳转GPIOC的定义:
#define GPIOC ((GPIO_TypeDef *)GPIOC_BASE)
继续跳转GPIOC_BASE:
#define GPIOC_BASE (APB2PERIPH_BASE + 0x00001000UL)
再跳转APB2PERIPH_BASE:
#define APB2PERIPH_BASE (PERIPH_BASE + 0x00010000UL)
最终PERIPH_BASE定义为:
#define PERIPH_BASE 0x40000000UL
计算可得:GPIOC_BASE = 0x40000000 + 0x10000 + 0x1000 = 0x40011000,这正是上一篇笔记提到的 GPIOC 组寄存器基地址:
因此,GPIOC本质是指向0x40011000的指针,函数通过它访问 GPIOC 的所有寄存器。
2. 函数内部关键操作:配置 CRH/CRL 寄存器
HAL_GPIO_Init函数内部逻辑复杂,我们聚焦 “配置模式” 的核心代码: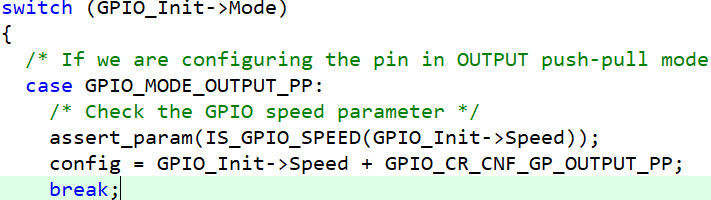

选择配置寄存器:
configregister = (iocurrent < GPIO_PIN_8) ? &GPIOx->CRL : &GPIOx->CRH;
引脚 0~7 用 CRL 寄存器,8~15 用 CRH 寄存器(PC13 是 13 号引脚,因此选择 CRH)。
修改寄存器值:
MODIFY_REG(*configregister, configmask, (config << registeroffset));
跳转MODIFY_REG宏定义:
#define MODIFY_REG(REG, CLEARMASK, SETMASK) WRITE_REG((REG), (((READ_REG(REG)) & (~(CLEARMASK))) | (SETMASK)))
逻辑拆解:
READ_REG(REG):读取寄存器当前值;& (~(CLEARMASK)):清除需要修改的位(避免干扰其他位);| (SETMASK):设置目标值;WRITE_REG:将结果写回寄存器。
对于 PC13,config的值由GPIO_Init->Speed + GPIO_CR_CNF_GP_OUTPUT_PP计算:
GPIO_SPEED_FREQ_LOW对应0x2(二进制10);GPIO_CR_CNF_GP_OUTPUT_PP定义为0x0(二进制00);
因此config = 0x2(二进制10),写入 CRH 寄存器的对应 4 位(控制 PC13),正好对应 “推挽输出、低速” 模式(上一篇笔记的寄存器配置表可查: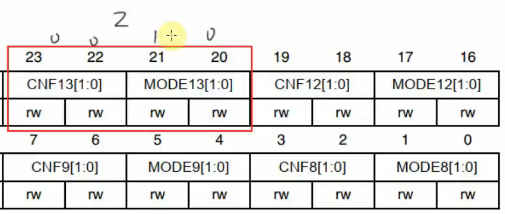
五、HAL_GPIO_WritePin:初始电平的设置
代码中HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET);用于设置引脚初始电平,跳转其定义可知,它操作的是 BSRR 寄存器: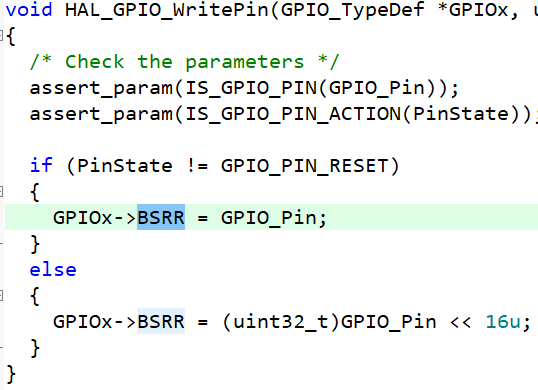
GPIO_PIN_RESET(低电平)对应 BSRR 的高 16 位(1 << (13+16) = 1 << 29);GPIO_PIN_SET(高电平)对应低 16 位(1 << 13)。
这与我们之前直接操作 BSRR 寄存器的逻辑一致 —— 通过单独操作特定位,避免影响其他引脚电平。
六、总结:HAL 库的本质是 “寄存器操作的封装”
拆解完代码会发现:无论是MX_GPIO_Init中的结构体配置,还是HAL_GPIO_Init、HAL_GPIO_WritePin等函数,底层都是通过指针访问寄存器(CRH、BSRR 等),并通过宏定义简化位操作。
HAL 库的价值在于:将复杂的寄存器地址计算、位操作逻辑封装成 “结构体 + 函数” 的形式,让开发者无需记忆地址和位掩码,只需通过 CubeMX 图形化配置或简单的函数调用即可完成硬件配置。但理解底层原理后,无论使用 HAL 库、标准库还是直接操作寄存器,都能得心应手。
结尾
本文通过拆解MX_GPIO_Init函数,理清了 CubeMX 生成代码与 GPIO 硬件配置的对应关系,也再次验证了 “HAL 库本质是寄存器操作” 的结论。下一篇笔记,我们将把点灯与按键结合,用 GPIO 的输入模式读取按键状态,实现 “按键控制 LED” 的交互功能,进一步巩固输入输出模式的应用。
Hello_Embed 继续带你从代码到硬件,逐步掌握 STM32 的实用开发技巧,敬请期待~

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 24
24 0
0- 0



 已为社区贡献61条内容
已为社区贡献61条内容

所有评论(0)