STM32F103C8T6基础开发指南:从零到项目实践
STM32F103C8T6是STMicroelectronics(意法半导体)生产的一款广泛使用的基于Cortex-M3内核的32位ARM微控制器。作为STM32 F1系列的中档产品,它具有丰富的外设和较高的性能,特别适合于那些要求较高的应用场合。其设计旨在为各种应用提供平衡的性能、功耗和成本。本章将详细介绍STM32F103C8T6的核心特性和应用范围,以及它如何在现代嵌入式系统中发挥关键作用。

简介:STM32F103C8T6是意法半导体基于ARM Cortex-M3内核的微控制器,具有丰富的外设集,适用于多种嵌入式应用。MDK开发工具和HAL库简化了硬件操作,使得开发者能更专注于应用开发。本文档提供的”STM32F103C8T MDK HAL库工程模版”包含了初始化代码、LED控制等基础开发框架,帮助开发者快速开始项目。模板文件包括主函数、HAL库配置、中断服务、系统初始化、构建文件等。通过模板,开发者可以掌握STM32F103C8T6的使用,了解HAL库配置,并熟悉MDK项目构建。 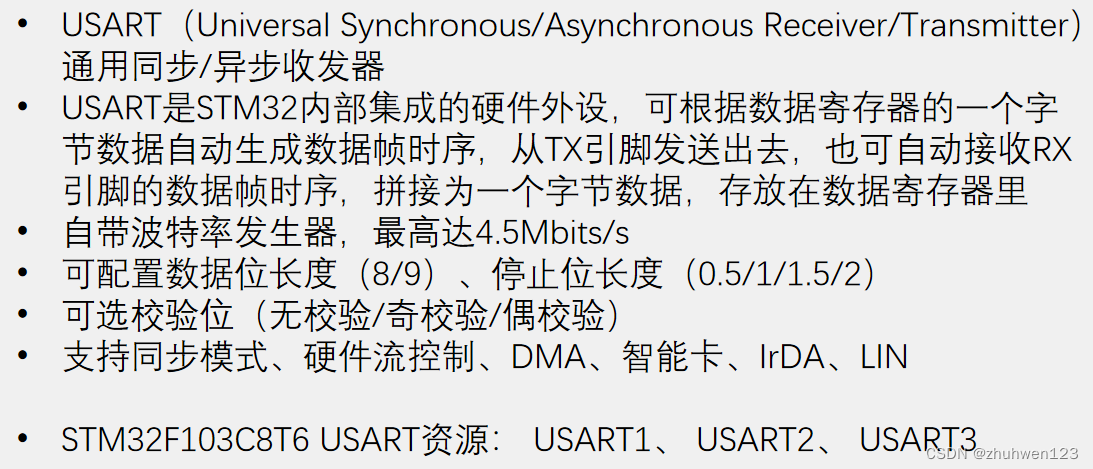
1. STM32F103C8T6微控制器概述
STM32F103C8T6是STMicroelectronics(意法半导体)生产的一款广泛使用的基于Cortex-M3内核的32位ARM微控制器。作为STM32 F1系列的中档产品,它具有丰富的外设和较高的性能,特别适合于那些要求较高的应用场合。其设计旨在为各种应用提供平衡的性能、功耗和成本。本章将详细介绍STM32F103C8T6的核心特性和应用范围,以及它如何在现代嵌入式系统中发挥关键作用。
## 1.1 STM32F103C8T6的核心特性
- 核心频率:72MHz,高性能的Cortex-M3内核。
- 内存:64KB闪存,20KB SRAM。
- 多样的通信接口,包括USART, SPI, I2C, CAN等。
- 丰富的模拟外设,包括ADC, DAC, 比较器等。
- 可灵活配置的GPIO引脚。
## 1.2 应用领域
- 工业控制:如PLC,传感器数据采集等。
- 医疗设备:便携式诊断设备,健康监测系统等。
- 消费电子:智能家居,玩具,个人电子设备等。
- 自动化设备:生产线控制,机器人技术等。
## 1.3 开发与资源支持
- 为开发者提供大量的文档和示例代码,便于快速学习和开发。
- 社区支持和论坛提供广泛的问题解答和经验分享。
- 适合快速原型开发和产品迭代。
通过本章的介绍,我们对STM32F103C8T6微控制器有了初步了解,为后续章节的深入学习奠定了基础。
2. ARM Cortex-M3内核特点
2.1 Cortex-M3内核架构简介
2.1.1 内核的基本设计和功能
ARM Cortex-M3内核是专为微控制器设计的32位RISC处理器,具有高性能和高能效的特征。该内核基于ARMv7-M架构,旨在为成本和功耗敏感型应用提供高效的计算能力。其核心设计包括一系列优化特性,如单周期的乘法和位反转指令,硬件除法支持,以及紧密耦合的中断控制器,这些设计显著提高了实时性能。
Cortex-M3还提供了一个紧密耦合的内存接口(TCM),这允许将关键代码和数据直接映射到处理器地址空间中,进一步提高处理速度和确定性。此外,内核支持Thumb-2指令集,这是ARM指令集的一个混合版本,支持32位指令的同时,保持了16位指令的高代码密度。
2.1.2 与其它内核的比较分析
与同为ARM架构的其它内核相比,Cortex-M3的优势在于其针对微控制器市场进行了特别优化。例如,相较于Cortex-M0/M0+,Cortex-M3提供了更高的性能和更丰富的指令集,而对于Cortex-M4,则去除了数字信号处理(DSP)指令集等高级特性,以优化成本。
在实时性能方面,Cortex-M3具有确定性的中断处理机制,支持尾链(Tail-chaining)中断返回,以及早期返回和尾链启动功能,这些机制减少了中断延迟,提高了中断服务响应时间。
2.2 Cortex-M3的性能优势
2.2.1 中断处理机制
Cortex-M3的中断处理机制非常高效,这得益于其特定于微控制器的优化。当中断发生时,处理器能够快速响应并保存当前状态,转而处理中断服务例程。为了最小化中断延迟,Cortex-M3使用尾链中断返回技术,当一个中断服务例程完成后,处理器可以立即处理下一个中断,而无需额外的指令周期用于保存和恢复寄存器状态。
此外,内核支持中断优先级管理,允许系统设计者定义不同中断源的优先级,确保高优先级的中断能够及时得到处理。
2.2.2 系统定时器和电源管理
系统定时器是Cortex-M3中实现时间管理和任务调度的重要组件。它可以用于实现操作系统的节拍定时器,或者作为硬件触发事件的时间基准。系统定时器由一个专门的系统控制块(System Control Block, SCB)进行管理,确保时间管理的准确性和可配置性。
电源管理方面,Cortex-M3内核支持多种睡眠模式和功耗状态。处理器可以在指令执行过程中自动切换到低功耗模式,例如睡眠模式,以便在不活动期间降低功耗。在一些微控制器中,Cortex-M3与特定的低功耗外围设备相结合,进一步优化了整体系统能效。
2.3 Cortex-M3与STM32F103C8T6的结合
2.3.1 内核与外设的交互方式
Cortex-M3作为STM32F103C8T6微控制器的核心,通过一个高效的内存映射输入输出(Memory-Mapped I/O, MMIO)系统与各种外设进行交互。每个外设都有一个固定的内存地址范围,处理器通过读写这些地址来控制外设的行为。这种交互方式使得编程变得简单直观,开发者可以通过标准的C语言指针操作来访问外设。
在内核和外设之间,还有一个特殊的寄存器组——内核外设寄存器(System Core Peripheral Registers),这些寄存器用于配置内核本身的参数,如中断优先级、系统时钟源选择等。
2.3.2 特色功能实现的内在支持
Cortex-M3为STM32F103C8T6提供了多种特色功能实现的支持。例如,其内置的嵌套向量中断控制器(NVIC)支持多达240个中断,使得STM32F103C8T6能够支持复杂的中断驱动程序设计。另外,Cortex-M3的睡眠模式和低功耗特性也使得STM32F103C8T6在设计低功耗设备时具有了优势。
在调试和跟踪功能上,Cortex-M3支持串行线调试(Serial Wire Debug, SWD)和串行线跟踪(Serial Wire Trace),允许开发者利用JTAG或SWD接口进行调试,同时也支持使用串行跟踪端口进行代码执行过程的实时跟踪。
请注意,接下来的章节内容需要根据提供的信息逐步扩展,并加入所有要求的细节和代码块,以确保满足既定的要求。
3. MDK开发工具与RealView/uVision IDE介绍
3.1 MDK开发环境的安装与配置
3.1.1 系统要求和安装步骤
安装MDK(Microcontroller Development Kit)是进行STM32F103C8T6项目开发的第一步。MDK由Keil公司提供,是专为基于ARM处理器的微控制器设计的集成开发环境。在安装MDK之前,需要确保计算机满足以下基本系统要求:
- Windows操作系统,支持的版本包括XP、Vista、Windows 7、8和10。
- 处理器至少为Intel Pentium II或兼容处理器。
- 最少512MB RAM,推荐使用更高配置以提高开发效率。
- 大约1GB的硬盘空间用于安装MDK及其组件。
安装过程通常遵循以下步骤:
- 下载MDK安装包。
- 双击安装包开始安装。
- 在安装向导中选择安装路径和组件。
- 点击“安装”并耐心等待安装过程完成。
- 安装完成后,重启计算机,以确保MDK的所有组件都被正确加载。
3.1.2 创建第一个工程的流程
创建一个新的工程是学习如何使用MDK IDE的重要一步。以下是创建STM32F103C8T6工程的基本流程:
- 打开MDK uVision IDE。
- 在启动界面,点击“Project”菜单下的“New uVision Project…”。
- 在弹出的对话框中选择保存工程的位置,并为工程命名。
- 在“Select Device for Target”对话框中,从芯片数据库中选择“STMicroelectronics STM32F10x”系列和对应的“STM32F103C8T6”型号。
- 选择工程模板,例如“Hello World ARM”,以便快速开始。
- 点击“OK”完成工程创建。
完成上述步骤后,你将拥有一个基本的工程框架,包括一个主程序文件main.c和系统配置文件system_stm32f10x.c。接下来,你就可以开始编写代码,并使用MDK IDE提供的编译、下载和调试工具进行开发。
3.2 RealView/uVision IDE的界面与功能
3.2.1 IDE界面布局和功能模块
Keil RealView/uVision IDE提供了简洁直观的用户界面布局,旨在提升开发者的开发效率。IDE界面主要分为以下几个模块:
- 菜单栏 :提供工程管理、编译控制、调试工具等各项操作的快捷方式。
- 工具栏 :包含常用的编辑、编译、下载和调试操作按钮,通过点击可以直接执行相关操作。
- 项目窗口 :展示工程中所有的文件和项目树结构。
- 源文件编辑器 :用于编写和编辑代码,支持语法高亮和代码折叠等功能。
- 输出窗口 :显示编译、调试等操作的输出信息。
- 调试控制台 :用于查看调试过程中的各种日志信息。
3.2.2 工具链和调试工具的使用
使用RealView/uVision IDE进行项目开发,需要熟悉以下工具链和调试工具:
- 编译器 :MDK-ARM包括一个高效的ARM编译器,支持C和C++语言。
- 链接器 :负责将编译后的目标文件链接成最终的可执行文件。
- 调试器 :MDK-ARM集成了高性能的调试器,支持片上调试功能。
- 性能分析器 :可对程序运行性能进行分析,帮助优化代码。
为了充分利用这些工具,你需要了解如何配置编译选项、设置断点、进行单步调试和观察变量等操作。这些调试工具的使用能够帮助开发者快速定位问题,优化程序性能,从而提升开发效率。
3.3 MDK与STM32F103C8T6的集成
3.3.1 驱动安装和硬件配置
在开始STM32F103C8T6项目开发之前,需要确保相关的驱动程序已安装正确。这包括USB转串口驱动、ST-Link驱动等。确保这些驱动程序安装正确后,可以通过以下步骤将MDK与目标硬件配置集成:
- 连接STM32F103C8T6开发板和PC。
- 在MDK中打开设备的配置文件,如STM32F10x.sct或STM32F10x.ld。
- 设置工程选项,确保选择正确的芯片型号和目标配置。
- 在下载配置中选择正确的设备和接口。
- 通过菜单栏“Debug”->“Start/Stop Debug Session”或点击工具栏上的调试按钮,进行调试会话。
3.3.2 工程模板和项目构建
创建一个工程模板是使开发过程更加高效的重要步骤。通过使用模板,可以避免每次创建新项目时重复配置相同的项目设置。MDK提供了一些基本的工程模板,但开发者也可以根据需要创建自己的模板。项目构建包括编译代码、链接对象文件和生成可执行文件等步骤。
要构建项目,请遵循以下步骤:
- 确保所有源文件和配置文件已正确添加到项目中。
- 在MDK中打开项目。
- 选择“Project”菜单下的“Options for Target…”来配置工程的编译选项、内存设置和调试选项。
- 点击“Build”按钮开始编译过程。
一旦构建完成,可执行文件将被保存在工程的输出目录中,你就可以将这个文件下载到目标硬件中运行。
在创建和配置工程的过程中,建议定期使用版本控制工具,如Git,来管理项目文件的变化,这样可以更好地跟踪开发进度和协作开发。
4. HAL库功能与优势
4.1 HAL库概述
4.1.1 HAL库与标准外设库的对比
在嵌入式开发中,软件库提供了丰富的函数和数据结构,这些资源对硬件进行抽象,简化了开发流程。HAL库和标准外设库是STM32微控制器常用的两种开发库。
标准外设库(Standard Peripheral Library, SPL)是较早期STM32开发使用的库,它提供了一系列函数,用于直接操作硬件寄存器。SPL的优势在于灵活性高,开发者可以直接访问和操作硬件,但这也意味着开发者需要对硬件有深入的理解。同时,SPL库在不同型号的STM32微控制器间移植时,需要手动修改较多的硬件配置代码。
而HAL库(硬件抽象层库)是为了降低开发者对硬件底层细节的关注而设计的。HAL库提供了一套标准API,通过这些API,开发者可以不必关心底层硬件的具体实现,只需调用相应函数即可完成操作。HAL库相较于SPL,易于学习和使用,也更便于移植和维护。在新版本的STM32CubeMX工具支持下,HAL库与硬件的配置和代码生成变得更加高效。
4.1.2 HAL库的核心理念和架构
HAL库的核心理念是提供一套硬件无关的API,隐藏硬件细节,从而实现代码的可重用性和跨平台移植性。HAL库使用统一的API接口来访问各种外设,无论硬件平台如何变化,这些API函数的使用方式保持一致,这极大地提高了开发效率和代码的可移植性。
HAL库的架构设计中包含了以下几个关键部分:
- HAL核心模块 :提供设备初始化和主要的功能函数,是所有其他模块的基础。
- 外设驱动模块 :这些模块封装了针对特定外设的功能,例如ADC、I2C、SPI等。
- 通用外设的中间件 :为常见的外设功能提供高级抽象,例如定时器管理、中断管理、低功耗模式等。
HAL库通过配置结构体来定义硬件资源,通过HAL函数来控制这些资源。这些函数是按照“设置-使能-配置-操作”的流程设计的。例如,对于I2C通信,会有如下的函数序列:
/* I2C初始化 */
HAL_I2C_Init(&hi2c1);
/* I2C使能 */
HAL_I2C_Start(&hi2c1);
/* 配置I2C的某个属性 */
HAL_I2C_ConfigAddress(&hi2c1, ...);
/* 执行读写操作 */
HAL_I2C_Mem_Read(...);
这种分层的设计让HAL库的代码结构更加清晰,同时也方便了对各种外设操作的统一管理和维护。
4.2 HAL库提供的API与支持
4.2.1 常用API的介绍和使用
HAL库为每一种外设提供了丰富的API,包括初始化、配置、启用、禁用、读取和写入等操作。以下列举了一些常用的API,以及它们的使用场景:
-
GPIO操作 :
c HAL_GPIO_WritePin(GPIOx, GPIO_PIN_x, GPIO_PIN_SET); // 设置GPIO为高电平 HAL_GPIO_TogglePin(GPIOx, GPIO_PIN_x); // 切换GPIO电平
GPIO操作API主要用于配置和控制GPIO引脚的电平状态。 -
定时器操作 :
c HAL_TIM_Base_Start_IT(&htim2); // 启动定时器2的中断 HAL_TIM_Base_Stop_IT(&htim2); // 停止定时器2的中断
定时器操作API用于初始化定时器,配置其周期以及启动和停止定时器的中断或连续计数。 -
ADC操作 :
c HAL_ADC_Start(&hadc1); // 启动ADC1 HAL_ADC_PollForConversion(&hadc1, HAL_MAX_DELAY); // 等待ADC转换完成 HAL_ADC_GetValue(&hadc1); // 读取ADC转换的值
ADC操作API用于开始一次ADC转换,查询转换状态,以及读取转换结果。 -
UART操作 :
c HAL_UART_Transmit(&huart1, (uint8_t*) "Hello World", 11, HAL_MAX_DELAY); // 通过UART1发送字符串 HAL_UART_Receive(&huart1, (uint8_t*) buffer, 10, HAL_MAX_DELAY); // 通过UART1接收数据到buffer
UART操作API用于发送和接收数据。
以上仅是HAL库中API的一小部分示例,通过这些API的组合使用,可以实现复杂的功能。
4.2.2 配置外设的API使用实例
以配置STM32的ADC为例,下面展示如何使用HAL库的API来完成ADC初始化和配置:
/* 初始化ADC */
void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
/* ADC1初始化 */
hadc1.Instance = ADC1;
hadc1.Init.ScanConvMode = ADC_SCAN_DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
/* ADC初始化错误处理 */
}
/* 配置ADC1的第一个通道 */
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
/* ADC通道配置错误处理 */
}
}
在这个例子中,首先初始化ADC1,设置扫描模式、连续转换模式、外部触发、数据对齐方式和转换序列数量。然后配置ADC1的第一个通道的采样时间和通道。通过这种方式,可以对STM32的ADC进行精确的控制和配置。
4.3 HAL库的优势与实践应用
4.3.1 简化代码和提高移植性
HAL库最明显的优势之一在于它的代码简化和高移植性。HAL库通过设备的中间抽象层,隐藏了硬件的具体细节,使得开发者可以将更多的精力集中在应用逻辑上,而非硬件细节。
例如,使用HAL库编写一个简单的LED闪烁程序时,可以忽略硬件寄存器级别的操作,只需要关注业务逻辑,如下所示:
/* LED闪烁函数 */
void LED_Blink(void)
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
HAL_Delay(500); // 延时500ms
}
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
while(1)
{
LED_Blink(); // 调用LED闪烁函数
}
}
在上述代码中,初始化系统、配置时钟和GPIO的代码都是通过HAL库提供的函数完成的。如果硬件平台或者外设发生变化,通过简单的配置修改即可适应新的硬件,而无需重写大部分代码。
4.3.2 实际项目中的应用案例
在实际项目中,HAL库提供了强大的支持,从简单的应用到复杂的系统设计,都能有效降低开发难度和提高开发效率。下面是一个使用HAL库实现的简单温度传感器读取案例:
/* 初始化ADC和温度传感器通道 */
void MX_ADC_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
hadc.Instance = ADC1;
hadc.Init.ScanConvMode = DISABLE;
hadc.Init.ContinuousConvMode = ENABLE;
hadc.Init.DiscontinuousConvMode = DISABLE;
hadc.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc.Init.NbrOfConversion = 1;
HAL_ADC_Init(&hadc);
sConfig.Channel = ADC_CHANNEL_10; // 温度传感器通道
sConfig.Rank = ADC_REGULAR_RANK_1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
HAL_ADC_ConfigChannel(&hadc, &sConfig);
}
/* 读取温度传感器 */
float Read_Temperature(void)
{
HAL_ADC_Start(&hadc); // 启动ADC
HAL_ADC_PollForConversion(&hadc, HAL_MAX_DELAY); // 等待转换完成
uint32_t adc_value = HAL_ADC_GetValue(&hadc); // 读取ADC值
/* 这里假设已经知道传感器的线性化公式和校准参数 */
float temperature = Linearize_Temperature_Sensor(adc_value);
return temperature;
}
在这个例子中, MX_ADC_Init 函数负责初始化ADC,并配置温度传感器通道,而 Read_Temperature 函数负责启动ADC转换,并计算得到实际温度值。
通过这样的案例,我们可以看到HAL库如何简化了外设的初始化和读取过程,让开发者将更多精力投入到温度数据的处理和应用逻辑上,而不必关心底层细节。
在实践中,HAL库的这些优势可以显著提高项目的开发速度和代码质量,尤其适合中大型项目以及团队协作开发的场景。开发者可以利用HAL库提供的丰富API,快速实现项目需求,并且在不同硬件平台间移植应用时,只需关注平台特定的配置差异,大大简化了开发工作。
5. STM32F103C8T6工程模板内容
5.1 模板目录结构解析
在STM32微控制器项目的开发过程中,工程模板是快速启动项目的基石。一个结构良好、内容丰富的模板可以帮助开发人员节省大量配置时间,快速进入代码编写阶段。
5.1.1 标准模板的文件组成
标准的STM32F103C8T6工程模板通常包括以下几个核心部分:
- Core文件夹 :存储内核相关代码,包括启动文件和系统配置文件。
- Drivers文件夹 :包含硬件驱动的源代码和头文件,用于控制各种外设。
- Middlewares文件夹 :提供中间件组件,比如USB、TCP/IP堆栈等。
- Src文件夹 :放置所有用户编写的应用代码,包括主函数main.c。
- Inc文件夹 :包含用户代码需要的头文件,如main.h。
- Startup文件夹 :存放启动代码,如STM32F10x型号的startup_stm32f10x_xx.s。
- Makefile/Launchpad/STM32CubeMX项目文件 :用于构建和配置工程的脚本或配置工具文件。
5.1.2 各文件的功能和作用
- 启动代码文件 :初始化CPU和内存,设置堆栈指针,调用系统初始化函数和主函数。
- 系统配置文件 :配置时钟、中断优先级等系统级设置。
- 主函数(main.c) :程序的入口点,负责初始化硬件和运行主循环。
- 硬件驱动文件 :实现对特定外设的控制逻辑。
- 中间件组件 :提供额外的服务和功能,例如操作系统的API。
5.2 模板中关键代码分析
模板中包含了完成特定功能必须的关键代码片段。理解并掌握这些代码是快速开发STM32F103C8T6项目的前提。
5.2.1 主函数和中断服务函数
主函数(main.c)通常是模板中最先被关注的部分。它包含了程序的主要逻辑。以下是一个简化的主函数框架:
#include "main.h"
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
while (1)
{
// 主循环代码
HAL_GPIO_TogglePin(GPIOx, GPIO_PIN_x); // 切换LED状态
}
}
void SystemClock_Config(void)
{
// 此处填写时钟配置代码
}
void MX_GPIO_Init(void)
{
// 此处填写GPIO初始化代码
}
每个函数都具有特定的作用:
- HAL_Init :初始化HAL库,包括硬件资源。
- SystemClock_Config :配置系统时钟,确保CPU和外设工作在正确的频率。
- MX_GPIO_Init :初始化GPIO,配置LED等设备的引脚。
5.2.2 硬件初始化代码的编写
在 MX_GPIO_Init 函数中,初始化代码将根据实际硬件连接情况进行编写。以下是一个配置单个LED灯的例子:
void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOx_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOx, GPIO_PIN_x, GPIO_PIN_RESET);
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = GPIO_PIN_x;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOx, &GPIO_InitStruct);
}
这段代码将指定的GPIO引脚配置为输出模式,并默认设置为低电平。
5.3 模板的个性化定制与扩展
一个成功的模板不仅仅是一个开始,还应该是可以不断成长和优化的。通过调整和扩展模板,可以创建出适应特定需求的项目。
5.3.1 模板的调整与优化
根据项目的具体要求,模板中的文件和代码可能需要进行调整。这包括:
- 修改配置文件 :根据项目需求调整时钟、GPIO等配置。
- 添加新的驱动文件 :如果需要使用其他外设,需要添加相应的驱动文件。
- 优化启动代码 :优化引导加载程序以提高系统的启动速度。
5.3.2 针对特定需求的模块开发
对于不同的应用场景,可能需要开发特定的模块来实现额外的功能。例如:
- 添加新的外设驱动 :开发和集成新的外设驱动,比如CAN、SPI、I2C等。
- 模块化设计 :将工程分解为独立的模块,每个模块负责一组功能,便于管理和维护。
- 集成中间件 :集成网络、图形、文件系统等中间件,为项目提供高级功能支持。
通过不断调整和扩展模板,可以快速适应新的开发需求,缩短项目的开发周期,提高开发效率。
6. LED控制示例代码
6.1 LED控制的基本原理
6.1.1 GPIO的基本操作
通用输入输出端口(GPIO)是微控制器与外部世界交互的基础。在STM32F103C8T6微控制器中,GPIO端口可以配置为输入或输出模式,并且在输出模式下可进一步设置为推挽输出或开漏输出。对于LED控制来说,通常需要将GPIO配置为推挽输出模式。在推挽模式下,端口可以输出高电平或低电平,从而控制连接到该端口的LED的亮或灭。
6.1.2 LED闪烁的实现机制
LED闪烁通常利用定时器中断来控制,定时器中断可以在设定的时间间隔内触发中断服务程序,从而在程序中切换LED的状态。另一种常见的方法是使用延时函数,通过在代码中插入延时来简单实现LED的闪烁效果。但是,使用延时函数的方式会占用CPU资源,在其他任务执行时可能导致LED闪烁不均匀。因此,推荐使用中断方式实现LED的精确控制。
6.2 示例代码的编写与运行
6.2.1 代码清单和关键步骤
下面是一个简单的示例代码,演示如何使用STM32F103C8T6控制一个连接到GPIO端口的LED灯闪烁。此代码假设LED连接到GPIO端口的第13号引脚。
#include "stm32f10x.h"
void GPIO_Configuration(void);
int main(void)
{
/* 初始化GPIO */
GPIO_Configuration();
/* 主循环 */
while (1)
{
/* 切换LED状态 */
GPIOC->ODR ^= GPIO_Pin_13;
/* 延时 */
for (uint32_t i = 0; i < 500000; i++);
}
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能GPIOC时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* 配置GPIOC的第13号引脚为推挽输出模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
6.2.2 调试过程和问题解决
编译并下载程序到开发板后,可以看到LED灯开始闪烁。如果LED没有闪烁,需要检查以下几点:
- 确认LED的正负极是否连接正确。
- 检查是否正确配置了对应的GPIO端口和引脚。
- 使用调试工具查看GPIO端口的电平状态,确定是否按预期翻转。
- 确认电源供应是否稳定,以及是否连接了正确的电阻来限制LED的电流。
6.3 示例代码的深入解读
6.3.1 代码优化和效率提升
在上面的示例中,使用了简单的延时循环来控制LED闪烁的频率。这种方法简单,但不够高效,尤其是在有其他任务需要CPU处理时。优化的方法是使用硬件定时器来生成周期性的中断,然后在中断服务程序中切换LED状态,从而释放CPU资源以处理其他任务。
6.3.2 多LED控制与状态显示
若要在同一微控制器上控制多个LED,并且实现不同的闪烁模式或状态显示,可以通过配置多个GPIO端口,并在代码中定义不同的控制逻辑来实现。此外,可以引入状态机的概念,为每个LED定义不同的状态,并在每个状态中实现特定的行为,如闪烁频率、亮灭持续时间等。这将需要更复杂的逻辑和更多的代码实现,但可以提供更大的灵活性和丰富的显示效果。
// 假设使用三个LED,分别连接到GPIO端口的第12、13、14号引脚
#define LED1_PIN GPIO_Pin_12
#define LED2_PIN GPIO_Pin_13
#define LED3_PIN GPIO_Pin_14
void MultipleLED_Configuration(void);
void MultipleLED_Control(void);
int main(void)
{
/* 初始化多个GPIO */
MultipleLED_Configuration();
/* 主循环 */
while (1)
{
/* 根据需要调用控制函数 */
MultipleLED_Control();
}
}
void MultipleLED_Configuration(void)
{
// 配置GPIO端口和引脚的代码
}
void MultipleLED_Control(void)
{
// 控制多个LED的代码
}
以上代码只是一个结构框架,具体实现需要根据每个LED的特定需求来编写。通过这种方式,可以实现多LED的同步或异步闪烁,以及不同的显示模式。
7. 文件结构与模板组件解释
在STM32F103C8T6的工程开发中,一个组织良好的文件结构和模板组件是至关重要的,它们不仅有助于提高开发效率,还能确保项目的可维护性和可扩展性。本章将深入探讨STM32F103C8T6工程的文件结构与模板组件的细节。
7.1 文件结构的布局与作用
STM32F103C8T6工程的文件结构清晰地将源代码、配置文件和资源文件进行了分类管理,这样的布局有助于开发者快速定位到需要编辑或查看的部分。
7.1.1 各类型文件的分类与功能
在工程目录中,通常会包含如下几种类型的文件和文件夹:
- Core :存放核心代码,包括启动文件、系统文件以及硬件抽象层(HAL)的源代码。
- Drivers :存放硬件驱动代码,如STM32F103C8T6的各种外设驱动。
- Middlewares :中间件组件,例如通信协议栈等。
- Inc :存放头文件(.h),用于声明函数、宏定义、变量等。
- Src :存放源代码文件(.c)。
- Startup :包含启动代码,如链接脚本(.ld)和系统启动代码,是系统初始化的关键部分。
- Drivers/STM32F10x_StdPeriph_Driver :存放标准外设库的源文件和头文件。
每种文件类型都有其特定的职责,例如:
- 启动代码负责系统初始化,如时钟设置、内存分配等。
- HAL文件定义了微控制器的基本操作,如配置GPIO、ADC等。
- 源代码文件(.c)和头文件(.h)包含了应用逻辑和设备的具体配置。
7.1.2 源代码与头文件的组织
在实际的项目中,源代码文件和头文件按照功能进行组织,推荐使用以下实践:
- 每个.c文件对应一个.h文件,实现模块化编程。
- 使用include guards(包含守卫)在头文件中防止重复包含。
- 将公共的宏定义和类型定义放在项目级别的头文件中。
以模板组件中的GPIO控制为例,可能会有如下文件结构:
- gpio.h :定义了GPIO相关函数的声明。
- gpio.c :实现了上述函数,包括初始化GPIO、设置IO电平等。
- main.h :主头文件,包含了所有需要的库和模块的头文件。
通过这样的组织结构,使得代码易于管理和维护,也便于团队协作。
7.2 模板组件的功能和用途
STM32F103C8T6工程模板组件是根据不同的开发需求和阶段选择的,以确保项目的快速启动和高效开发。
7.2.1 硬件抽象层(HAL)的作用
HAL是硬件抽象层的缩写,它提供了一套标准的API,用于与硬件进行交互。HAL的作用包括:
- 简化硬件操作 :不需要深入了解硬件的细节,通过统一的API就可以完成如GPIO、ADC等的操作。
- 提高代码的可移植性 :当更换微控制器时,可以通过更新HAL层来适应新的硬件,而无需重写大量的应用代码。
- 封装硬件特定的细节 :HAL层封装了硬件特定的细节,使得开发者可以更加专注于业务逻辑的实现。
7.2.2 中间件组件(Middlewares)的介绍
中间件组件是位于操作系统和应用程序之间的软件层,它为应用程序提供额外的服务。STM32F103C8T6的工程模板中可能会包含以下中间件:
- USB Device :用于USB设备端的通信。
- FatFs :提供了文件系统的接口,使得操作存储介质如SD卡变得简单。
- LwIP :轻量级的TCP/IP协议栈,可以用来进行网络通信。
中间件组件可以极大地扩展STM32F103C8T6的功能,比如加入网络通信能力、实现文件存储等。
7.3 文件和组件的管理维护
随着项目的进行,文件和组件的数量会不断增加,因此合理的管理维护就变得非常关键。
7.3.1 版本控制与代码备份
版本控制系统如Git可以有效地管理代码的变更历史,确保不会因为误操作而导致重要更改的丢失。建议:
- 定期提交更改(Commit)。
- 使用分支(Branch)管理不同的开发阶段和功能。
- 建立标签(Tag)来标记重要的版本里程碑。
7.3.2 组件升级和依赖管理
随着软件开发的进展,可能会有新的版本的中间件或HAL库发布,合理的组件升级和依赖管理策略包括:
- 跟踪依赖版本 :在项目文档中记录使用的组件和依赖库的版本。
- 自动化工具 :使用如STM32CubeMX等工具来生成和升级代码,确保依赖的一致性。
- 定期更新 :定期检查并更新组件到最新稳定版本,以利用新的特性和改进的性能。
通过遵循上述的文件结构与模板组件解释,开发者可以更好地理解和应用STM32F103C8T6的工程模板,从而更高效地开发和维护项目。
简介:STM32F103C8T6是意法半导体基于ARM Cortex-M3内核的微控制器,具有丰富的外设集,适用于多种嵌入式应用。MDK开发工具和HAL库简化了硬件操作,使得开发者能更专注于应用开发。本文档提供的”STM32F103C8T MDK HAL库工程模版”包含了初始化代码、LED控制等基础开发框架,帮助开发者快速开始项目。模板文件包括主函数、HAL库配置、中断服务、系统初始化、构建文件等。通过模板,开发者可以掌握STM32F103C8T6的使用,了解HAL库配置,并熟悉MDK项目构建。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 11
11 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)