【easy_mc】一个简单的电机FOC控制系统
一个简单的基于FOC的有感电机控制算法,运行在STM32G4芯片,解决电角度定位问题。算法采用浮点计算,更多用于讲解FOC控制原理和过程,系统没Float硬件加速模块不建议使用。
简介
本项目主要面对用于FOC学习,为了更清晰看懂整套算法,相关算法并没有做专门的定点化优化,主要靠芯片自身的性能来完成性能优化,支持硬件浮点的芯片性能不会差。
仓库地址:bobwenstudy/easy_mc
项目特点
- 清晰明了,很多算法加了很多性能优化的处理,本项目只展示算法原理和实现,让初学者了解整套算法运行机制。
- 原理到实践,对每个硬件环境实现要求进行详细说明,并讲解测试方法和验证通过标准。
资料推荐
教你写一个比SimpleFOC更好的电机库_哔哩哔哩_bilibili,从0到1学习蛮好的。
手把手教您使用STM32G0/G4驱动BLDC/PMSM电机_哔哩哔哩_bilibili,从0到1学习,用Matlab仿真实现的示例。
原理介绍
从零开始自己编写FOC 算法篇:FOC和SVPWM_哔哩哔哩_bilibili,这个视频讲得蛮好的,包含python的实现代码。
深入浅出FOC控制-CSDN博客,不喜欢视频,喜欢文字的看这个。
【自制FOC驱动器】深入浅出讲解FOC算法与SVPWM技术 - 知乎,这个也讲得不错。
SVPWM
最核心的就是SVPWM了,这里主要参考彻底吃透SVPWM如此简单 - 知乎,文章进行实现,里面已经讲得很好了。
一些好看的动图
FOC控制中,相电流,母线电流,电机功率,这三者有何关系? - 知乎
[FOC 从0到1] 带你可视化坐标变换_哔哩哔哩_bilibili
EasyMC实现说明
FOC理论有一大堆,本质就是通过采样的Ia\Ib\Ic和Angle,控制电机的输出(PWM占空比)。
整个系统的输入为:Ia、Ib、Ic和Angle(决定FOC输出的主要输入),其他辅助的包括Vbus、Ibus之类(辅助用,并不直接觉得FOC数据)。
输出为:PWM占空比(也就是SVPWM输出)。
为了屏蔽软件和硬件行为,以便于在不同硬件板子和芯片中实现,软件分为2个部分,一个是HW Impl和FOC,其中HW Impl为具体硬件实现,控制具体的芯片的寄存器;FOC为纯软件行为。
由于FOC对时序要求很高,所以整个算法是由中断驱动运行的,High Task周期为PWM的周期(如10kHz和20kHz之类),Low Task周期为1ms中断。
flowchart RL
subgraph A[HW Impl]
a1[PWM Module]
a2[ADC-High Speed Module]
a3[ADC-Low Speed Module]
a4[Encoder Module]
a5[Debug Module]
end
subgraph B[FOC]
b1[SVPWM]
b2[FOC Control]
b3[High Task]
b4[Low Task]
b3-->b2
b2-->b1
end
B --> |HW Control
easy_mc_hw_start
easy_mc_hw_stop
easy_mc_hw_init
easy_mc_hw_deinit|A
B --> |PWM Control
easy_mc_hw_set_u_v_w_count|A
B --> |Debug
easy_mc_hw_vofa_debug_out
easy_mc_hw_debug_io_control|A
A --> |ABZ Encoder
Angle|B
A --> |High Task - Isr
easy_mc_isr_task_high_frequency
Ia,Ib,Ic|B
A --> |Low Task - Isr
easy_mc_isr_task_low_frequency
Vbus,Ibus|B
HW Impl
在不同硬件实现时,需要实现如下接口。
HW Control
主要用于控制所有硬件模块初始化和开关。包括:
easy_mc_hw_start,启动PWM输出。
easy_mc_hw_stop,关闭PWM输出。
easy_mc_hw_init,完成硬件模块时钟使能和初始化。
easy_mc_hw_deinit,关闭硬件模块时钟。
PWM Control
用于控制PWM的输出占空比。包括:
easy_mc_hw_set_u_v_w_count,控制UVW的输出占空比。
Debug
用于满足调试需要,包括VOFA时序输出和IO Debug信号输出。包括:
easy_mc_hw_vofa_debug_out,需要用DMA实现,FOC会在每次Low Task中Trigger一次,在中断中,波特率要求1ms内发送完毕。
easy_mc_hw_debug_io_control,控制io翻转,用于调试时序信号。
ABZ Encoder
暂时只实现了ABZ传感器,用于角度采集和z信号输入。包括:
easy_mc_hw_encoder_get_count,FOC算法调用,用于获取当前Encoder的计数值。
easy_mc_hw_encoder_set_zero,FOC算法调用,用于重置Encoder的计数值。
easy_mc_isr_set_zero,硬件触发调用FOC算法,用于通知FOC算法来了Z信号。
High Task
在每次Ia、Ib和Ic采样结束后触发,之后FOC根据当前的电流和角度信息,控制PWM输出,进而达到电机控制的目的。包括:
easy_mc_isr_task_high_frequency,FOC核心业务,后续展开。
Low Task
在每1ms需要触发1次,之后FOC会计算速度、调试输出、Vbus和Ibus采样这些行为。包括:
easy_mc_isr_task_low_frequency,FOC核心业务,后续展开。
easy_mc_hw_1ms_task,硬件需要实现,用于处理Vbus和Ibus采样等行为。
FOC-Low Task
1ms触发1次,主要完成以下任务,做一些耗时但是不紧急的业务。
需要注意,考虑到用户一般操作是在轮训之类场景做,为避免中断异步的问题,需要将用户操作接口和实际控制分离,用户页面不允许直接控制FOC,而是要通过中间接口,所有用户控制操作都需要在easy_mc_user_handle_command完成。
graph TD
A[FOC用户控制处理
easy_mc_user_handle_command]
B[Vbus,Ibus采样
easy_mc_hw_1ms_task]
C[Vofa输出
easy_mc_vofa_polling_send_data]
A-->B
B-->C
FOC-High Task
真正进行FOC控制的地方,按照PWM的周期运行。
graph TD
A[Encoder更新,包括speed,position计算
easy_mc_abz_encoder_update]
B[FOC用户控制处理
easy_mc_user_handle_command]
C[FOC状态机
easy_mc_high_freq_task_loop]
A-->B
B-->C
FOC状态机
FOC有以下状态,
MOTOR_STATE_INIT:初始化状态,刚上电在这个状态,什么都不做。
MOTOR_STATE_ADC_INIT:从初始化状态切换到工作状态时,必须走这个状态,进行ADC偏置计算。
MOTOR_STATE_ELECTRIC_ZERO_INIT:进行电角度定位。
MOTOR_STATE_MECHANICAL_ZERO_INIT:进行机械角度定位,将Z点作为position的0点。
MOTOR_STATE_ENABLE:电机运行状态,可以接受用户命令。
MOTOR_STATE_DISABLE:电机停止状态,可以接受用户命令。
typedef enum
{
MOTOR_STATE_INIT = 0,
MOTOR_STATE_ADC_INIT = 1,
MOTOR_STATE_ELECTRIC_ZERO_INIT = 2,
MOTOR_STATE_MECHANICAL_ZERO_INIT = 3,
MOTOR_STATE_ENABLE = 4,
MOTOR_STATE_DISABLE = 5,
} easy_mc_state_t;
状态机切换如下图所示。
部分对位置不敏感的项目,可以跳过MOTOR_STATE_MECHANICAL_ZERO_INIT状态,MOTOR_STATE_ENABLE和MOTOR_STATE_DISABLE可以切换。
MOTOR_STATE_ADC_INIT
在关闭电机PWM输出的情况下,计算ADC偏置,然后读取EASY_MC_ADC_OFFSET_CALC_MAX_CNT次而后取平均值。
MOTOR_STATE_ELECTRIC_ZERO_INIT
对于FOC控制而言,电角度非常关键,因为其是基于角度闭环控制的,如果电角度实际相位偏差,当控制Iq电流时,其实一部分能量作用到Id上,导致能量损失。尤其当电角度相位偏差为90°时,会导致只控制Iq并不会输出任何电流。
本项目基于FOC原理,在刚上电时,会用Uq开环控制,Uq配置为0,将Ud陆续增加,一段时间后,这时电机位置一定是在其电角度相位0点的位置,然后对encoder编码器进行归零操作,这时候采样角度和电角度就都为0了。
而后陆续降低Ud为0,以避免快速切换状态导致的电机抖动。
EASY_MC_CONFIG_ZERO_ALIGN_MAX_VOLTAGE,参数用于配置归零操作时的最大电压值。部分电机齿槽效益比较大,需要较大的电压来拉住电机。
EASY_MC_CONFIG_ENCODER_ZERO_ALIGN_TIMEOUT_MS,参数用于配置归零操作时的工作时间。根据需要调整。
MOTOR_STATE_MECHANICAL_ZERO_INIT
大多数业务场景下,需要一个准确的位置信息,通常是通过Z信号来定位的。
EASY_MC_CONFIG_ENCODER_ZERO_ALIGN_SPEED_RPM,配置机械角度定位时的运行速度,这时是用速度闭环控制。
EASY_MC_CONFIG_ENCODER_ZERO_ALIGN_SPEED_TIMEOUT_MS,配置机械角度定位时的超时时间。
FOC控制
最终控制电机的处理都在这里。网上有很多PID控制的图片了,这里就不在重新写了,这里重点描述控制流程。
graph TD
subgraph A[角度计算]
a1[OPEN_INC]
a2[ENCODER_ABZ]
a3[FIX]
end
B[电流计算]
subgraph C[FOC控制]
subgraph CA[UQ]
ca1[Park逆变化]
ca2[SVPWM计算]
ca3[PWM输出]
end
subgraph CB[IQ]
cb1[Clark变化]
cb2[Park变化]
cb3[Id/Iq经PID输出Ud/Uq]
end
subgraph CC[SPEED]
cc1[Id=0]
cc2[Iq=速度差的PID输出]
end
subgraph CD[POSITION]
cd1[Id=0]
cd2[Iq=位置差的PID输出]
end
subgraph CE[IQ_WITH_POSITION_LIMIT]
ce1[Positon溢出时,调整Iq=0]
end
end
A-->B
B-->C
CC-->|Id/Iq|CB
CD-->|Id/Iq|CB
CE-->|Id/Iq|CB
CB-->|Ud/Uq|CA
角度模式
本项目考虑各种场景,对角度来源定义了3种模式,分别是:
MOTOR_THETA_MODE_OPEN_INC:角度开环控制,按照motor_control.theta_inc角度提升,一般不怎么用,控制效果不怎么好。
MOTOR_THETA_MODE_ENCODER_ABZ:用ABZ编码器作为角度输入,开始运行后基本都会工作在这个模式下。
MOTOR_THETA_MODE_FIX:固定角度模式,在MOTOR_STATE_ELECTRIC_ZERO_INIT是就是用这个模式。
typedef enum
{
MOTOR_THETA_MODE_OPEN_INC = 0,
MOTOR_THETA_MODE_ENCODER_ABZ = 1,
MOTOR_THETA_MODE_FIX = 2,
} easy_mc_theta_mode_t;
控制模式
就是FOC的那些控制模式,然后加入了一些特殊的控制模式。
MOTOR_CONTROL_MODE_UQ:Uq的控制,不去计算电压电流,直接根据角度控制PWM输出,在MOTOR_STATE_ELECTRIC_ZERO_INIT用的就是这个模式,也可以用于验证电角度是否归零,配置Ud为有效值,手动旋转电机,看电机是否会动,不动基本证明电角度设置正确。
MOTOR_CONTROL_MODE_IQ:电流闭环控制,也就是力矩控制模式,很多资料讲了,就是根据采样的Id和Iq于Id_ref和Iq_ref进行对比,经过PID调节后,转换为Ud,Uq。再进行MOTOR_CONTROL_MODE_UQ控制。
MOTOR_CONTROL_MODE_SPEED:速度闭环控制,根据采样的Speed于Speed_ref的差值,经过PID调节后,转换为Iq_ref,而后进行MOTOR_CONTROL_MODE_IQ控制。
MOTOR_CONTROL_MODE_POSITION:位置闭环控制,根据采样的Position于Position_ref的差值,经过PID调节后,转换为Iq_ref,而后进行MOTOR_CONTROL_MODE_IQ控制。
MOTOR_CONTROL_MODE_IQ_WITH_POSITION_LIMIT:在电流闭环控制的基础上,就Position限制,在特定对行程敏感的业务场景下,快速关闭电机输出。本质还是MOTOR_CONTROL_MODE_IQ控制。
typedef enum
{
MOTOR_CONTROL_MODE_UQ = 0,
MOTOR_CONTROL_MODE_IQ = 1,
MOTOR_CONTROL_MODE_SPEED = 2,
MOTOR_CONTROL_MODE_POSITION = 3,
MOTOR_CONTROL_MODE_IQ_WITH_POSITION_LIMIT = 4,
} easy_mc_control_mode_t;
配置参数
默认参数在easy_mc_config_default.h中定义了默认值。
用户需要根据自己的板子实现app_easy_mc_config.h配置文件,里面根据具体板子情况,调整配置参数。
Porting说明
直接参考历程去实现即可。
euler_stm32g431:是欧拉电子的个人空间-欧拉电子个人主页-哔哩哔哩视频的板子+一个工业电机米格伺服电机110ST-M04030 05025 SJT-M040D凯恩帝华大广数包邮-淘宝网。
boot_stm32g474re:是另外一款电机。
待实现功能
抗锯齿算法
Odriver里面的算法简单直接,但是进行校准需要6min(Odriver文档写的),尝试实现了一下,在低转速下效果还可以,但是没太多实际意义,后续还是考虑要用别的更好的办法来做。
ODrive隐藏功能——转矩脉动抑制(抗齿槽算法)_哔哩哔哩_bilibili
下面是本地尝试实现后的低转速的效果,看起来还可以。但是实际用Iq控制时,体验不是那么丝滑。


实现注意事项
PWM载波频率选择
一个比较好的文章是这个:电机控制中载波频率大小的确定 - 知乎
低速电机建议用>20kHz,以减少电磁噪声。
电流环PI参数选择
可以参考(十) FOC的PI参数调节_哔哩哔哩_bilibili,告别经验调参–电流环PI参数自动整定 - 知乎,lab05a:FAST电流环pid参数自整定方法的探讨 - C2000™︎ 微控制器论坛 - C2000 微控制器 - E2E™ 设计支持,ST MCSDK FOC电流环PI参数整定 - 大大通(简体站)以及永磁同步电机(PMSM)磁场定向控制(FOC)电流环PI调节器参数整定_foc电流环pi参数整定过程-CSDN博客
有很多文章在讲,实际在使用的时候,遇到一个问题,就是这个参数太高了,这里需要乘以一个系数,也就是配置电流除以输出电压,不然电机会比较暴躁。(告别经验调参–电流环PI参数自动整定 - 知乎)
由于本项目是并联形PID,所以参数值计算公式如下:
#define EASY_MC_CURRENT_PI_BANDWIDTH (EASY_MC_CONFIG_PWM_FREQUENCY / 4)
#define EASY_MC_CURRENT_PI_COEX (EASY_MC_CONFIG_CURRENT_MAX / EASY_MC_CONFIG_VBUS_VOLTAGE)
#define EASY_MC_CONFIG_PID_CURRENT_KP (EASY_MC_CONFIG_LS * EASY_MC_CURRENT_PI_BANDWIDTH * EASY_MC_CURRENT_PI_COEX)
#define EASY_MC_CONFIG_PID_CURRENT_KI (EASY_MC_CONFIG_RS * EASY_MC_CURRENT_PI_BANDWIDTH * EASY_MC_CURRENT_PI_COEX)
注意,也不是一定要用这个公式计算,实际还是得调,EASY_MC_CURRENT_PI_COEX有时候配置直接是1/ EASY_MC_CONFIG_VBUS_VOLTAGE,电机更安静一些,具体工程上按需调整。
ADC采样注意
ADC采样时刻注意事项
FOC 电流采样方案对比(单电阻/双电阻/三电阻) - 知乎,写的很清楚了,根据具体的采样方案调整。
ADC采样滤波器注意事项
【电机控制】BLDC有感FOC控制——ADC电流采样_bldc电流采样-CSDN博客,提到一个工程问题,ADC电流不对劲,是工程中滤波器出问题了。可以用这个网站计算滤波器频率,RC滤波器截止频率在线计算器,
ADC采样周期注意事项
主要是各种节省成本方案的考量,可以看看这个文章。【电机控制】PMSM无感FOC控制(五)相电流检测及重构 — 单电阻采样-CSDN博客
ADC采样工程波形分析
看到各种ADC波形后的处理,FOC的ADC采样电流不平滑_foc电流采样波形-CSDN博客
ADC采样时钟配置
STM32G474配置
ADC的时钟不是越高越好,要看spec,要求最快速度为4Msps,那Msps单位是什么呢,继续往下看。
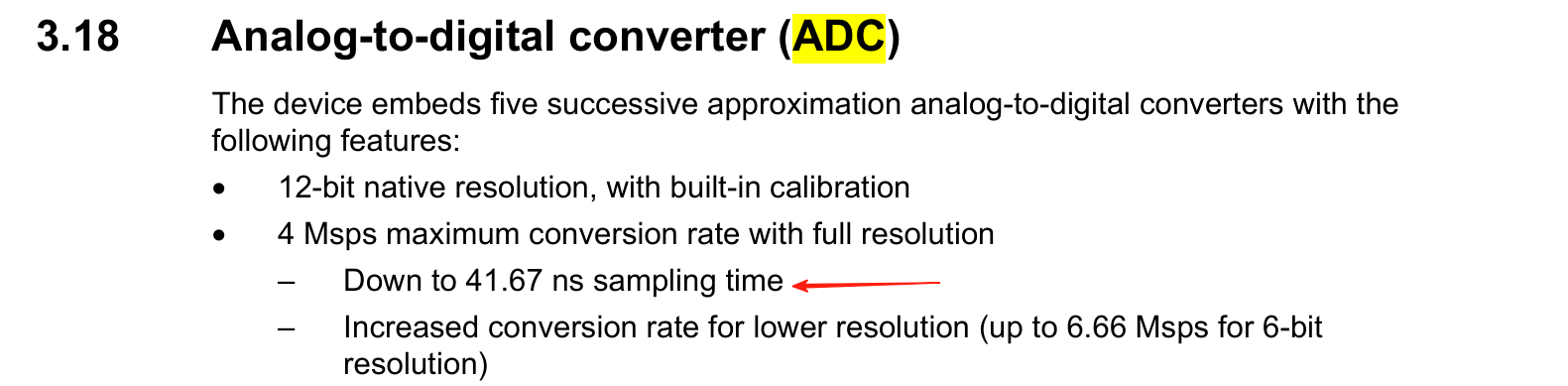
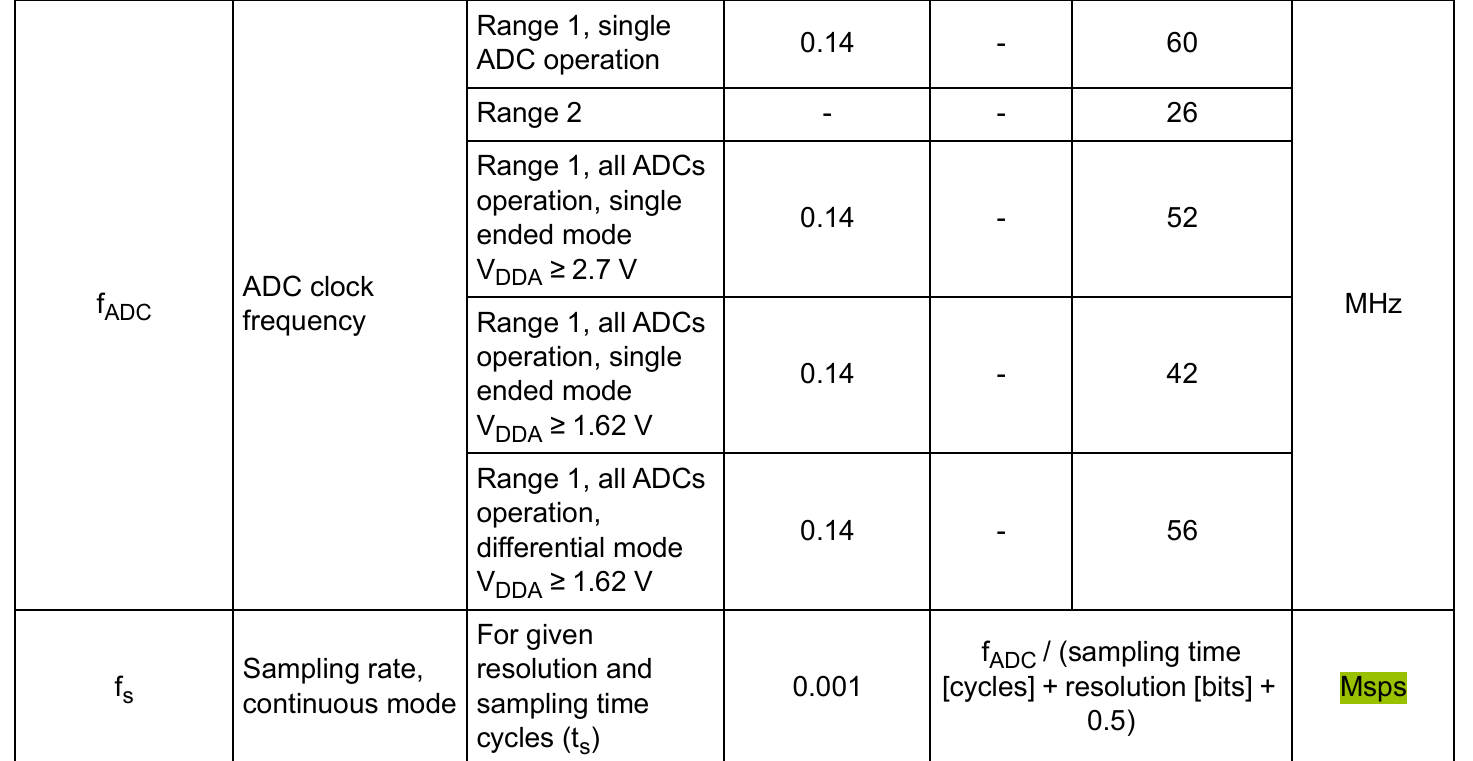
Msps的单位就是 fADC / (sampling time [cycles] + resolution [bits] + 0.5),fADC最快是60MHz,sampling time [cycles]最小是2.5,resolution [bits]用12bit的话,那就是60 / (2.5 + 12 + 0.5) = 4Msps。
需要注意,fADC的取值范围还要根据具体电压来。
测试环境搭建
为了进一步分析FOC行为,基于STM32G4芯片搭建测试环境,工程用ARM的GCC编译。
串口日志输出,波特率115200,打印一些状态信息。
VOFA日志输出,波特率2000000,用DMA TX,用于打印高频业务。
IO翻转调试,提供两个IO口用于分析时序问题。
三电阻采样电路,有三路ADC采集A/B/C的电流。
母线电阻采样电路,用于采集母线电流,不用于电机控制,主要用于电路分析。
母线电压采样电路,用于采集母线电压,不用于电机控制,主要用于电路分析。
测试例程
SVPWM测试
最主要的测试就是SVPWM测试了,分为了几个子测试,通过串口日志看状态、VOFA看波形以及IO翻转看时序。
其中foc_svpwm_test测试用串口输出了1个周期的Tcm输出。foc_svpwm_wave_test通过VOFA循环输出变化波形,看有没异常点。
void foc_test(void)
{
foc_svpwm_test();
foc_svpwm_wave_test();
}
void app_main(void)
{
foc_test();
}
VOFA分析
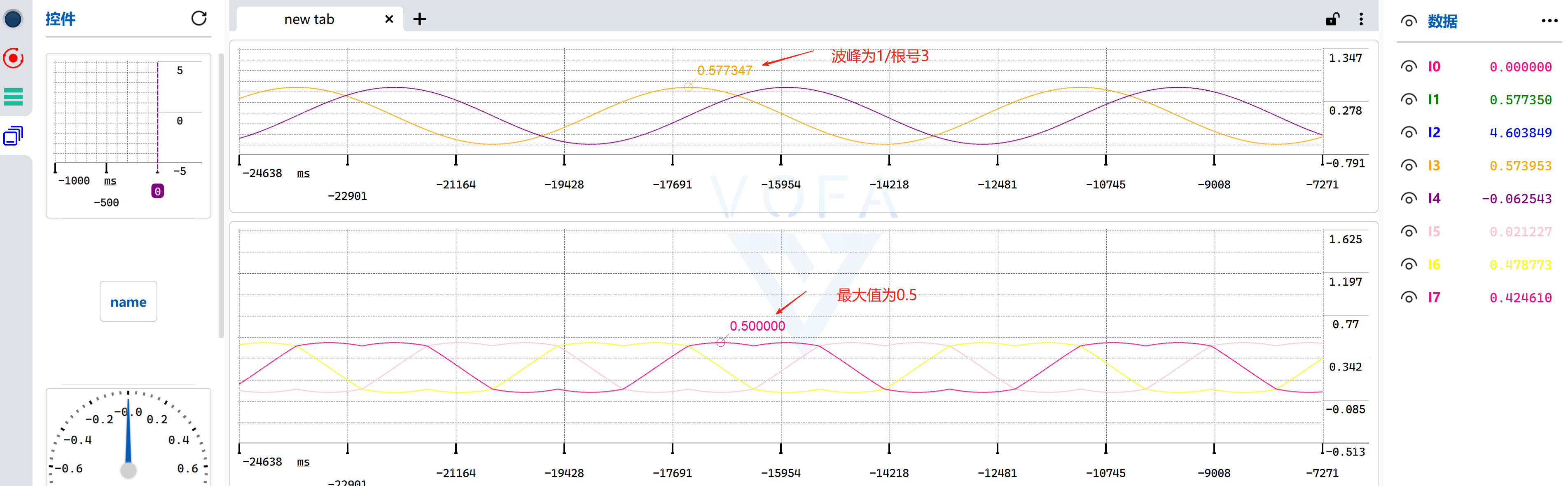
通过foc_svpwm_wave_test一直工作,看VOFA波形,确保u_alpha和u_beta的峰峰值为1/根号3。马鞍波的峰值为0.5。
IO时序分析
通过foc_svpwm_wave_test一直工作,看IO0和IO1的翻转,可以看到一次SVPWM用时1.2us,SIN/COS以及PACK逆变换用时2us。

PWM测试
主要测试PWM输出是否正常,并且测试ADC触发是否在3个MOS的Low侧中间打开,避免ADC采样时间点异常。
初始化完硬件后,将UVW的PWM输出调整一下占空比。确保有波形输出,电机需断开。同时注册easy_mc_isr_task_high_frequency_user_handle回调,配置EASY_MC_CONFIG_DEBUG_CUSTOM_IRQ_HANDLE宏,使用用户自定义high接口(避免foc整个业务运行)。
void easy_mc_isr_task_high_frequency_user_handle(void)
{
easy_mc_hw_debug_io_control(0, 1);
easy_mc_hw_debug_io_control(0, 0);
}
void app_main(void)
{
uint32_t test_unit = EASY_MC_PWM_PERIOD_CYCLES / 10;
easy_mc_hw_init();
easy_mc_hw_start();
easy_mc_hw_set_u_v_w_count(test_unit, test_unit * 2, test_unit * 3);
}
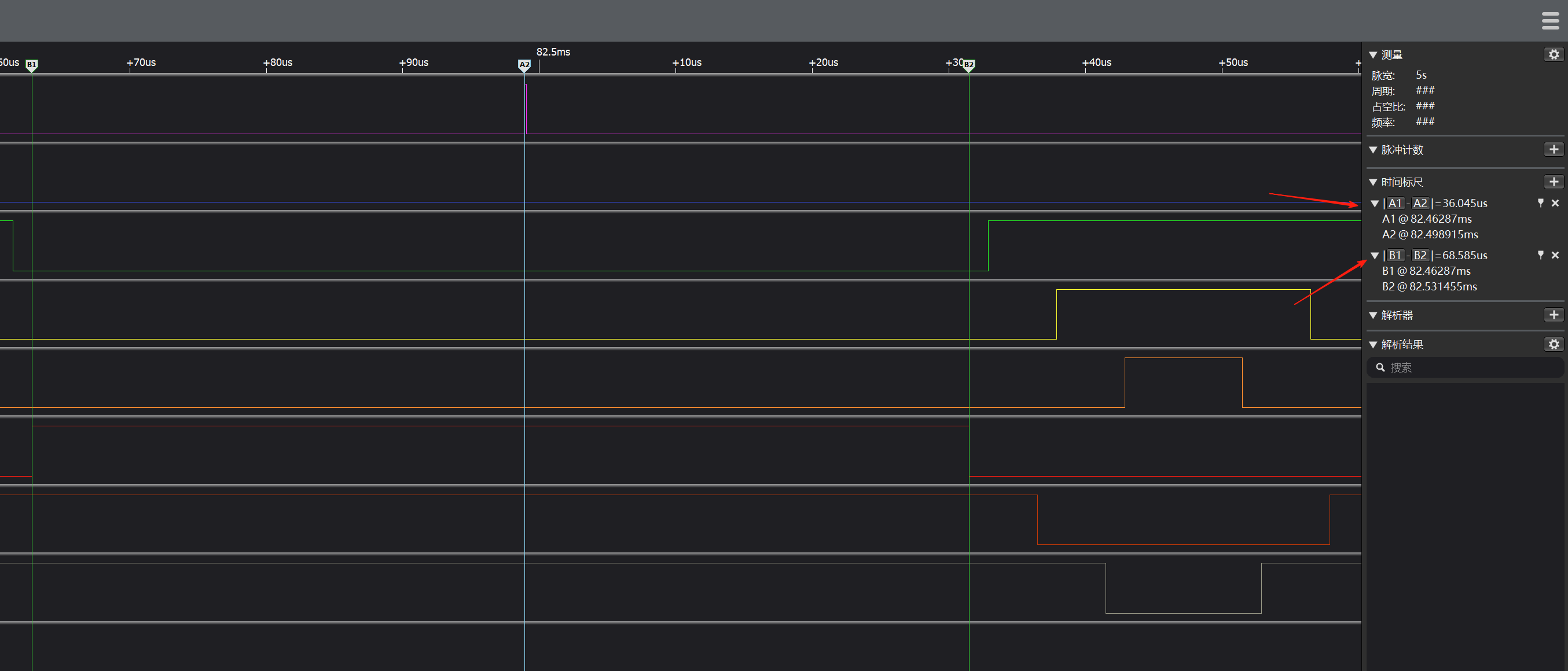
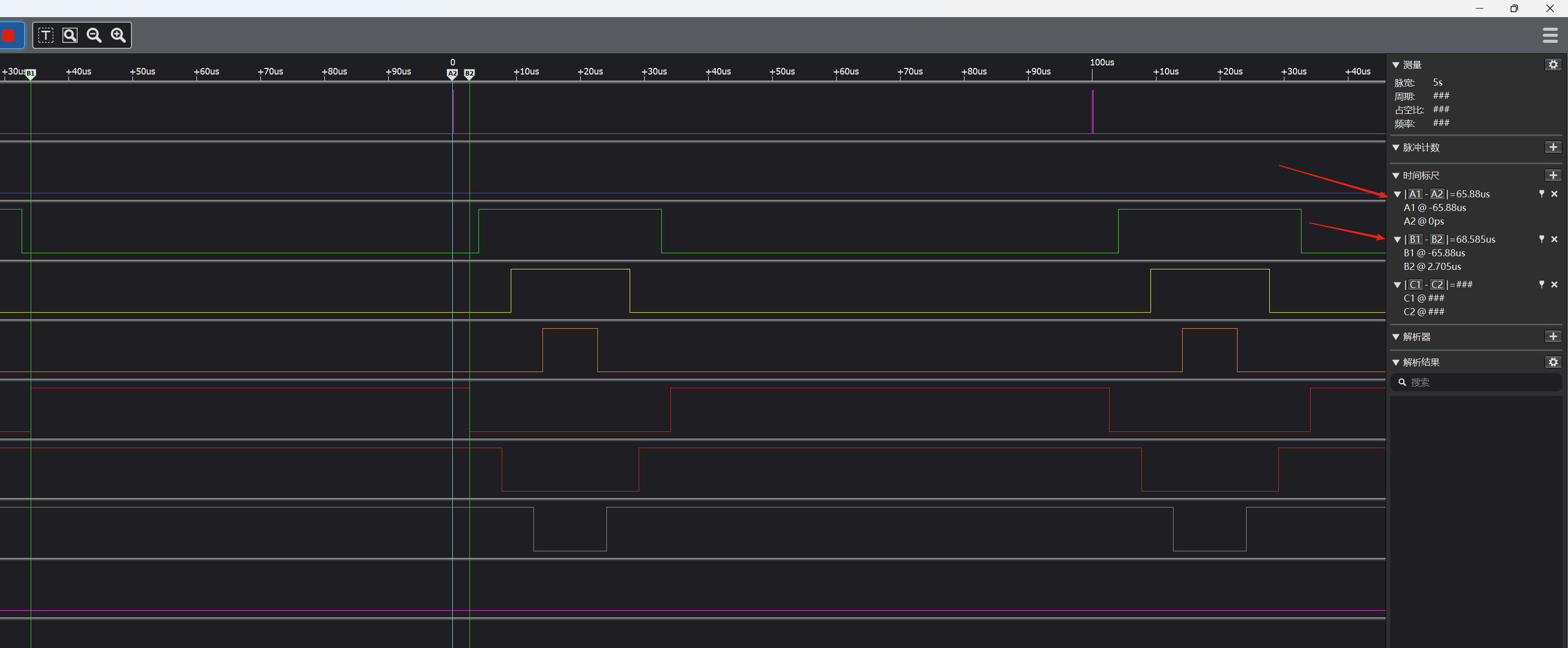
如下图所示,ADC中断触发时间点在3个MOS的Low侧中间打开,说明采样时刻没问题。
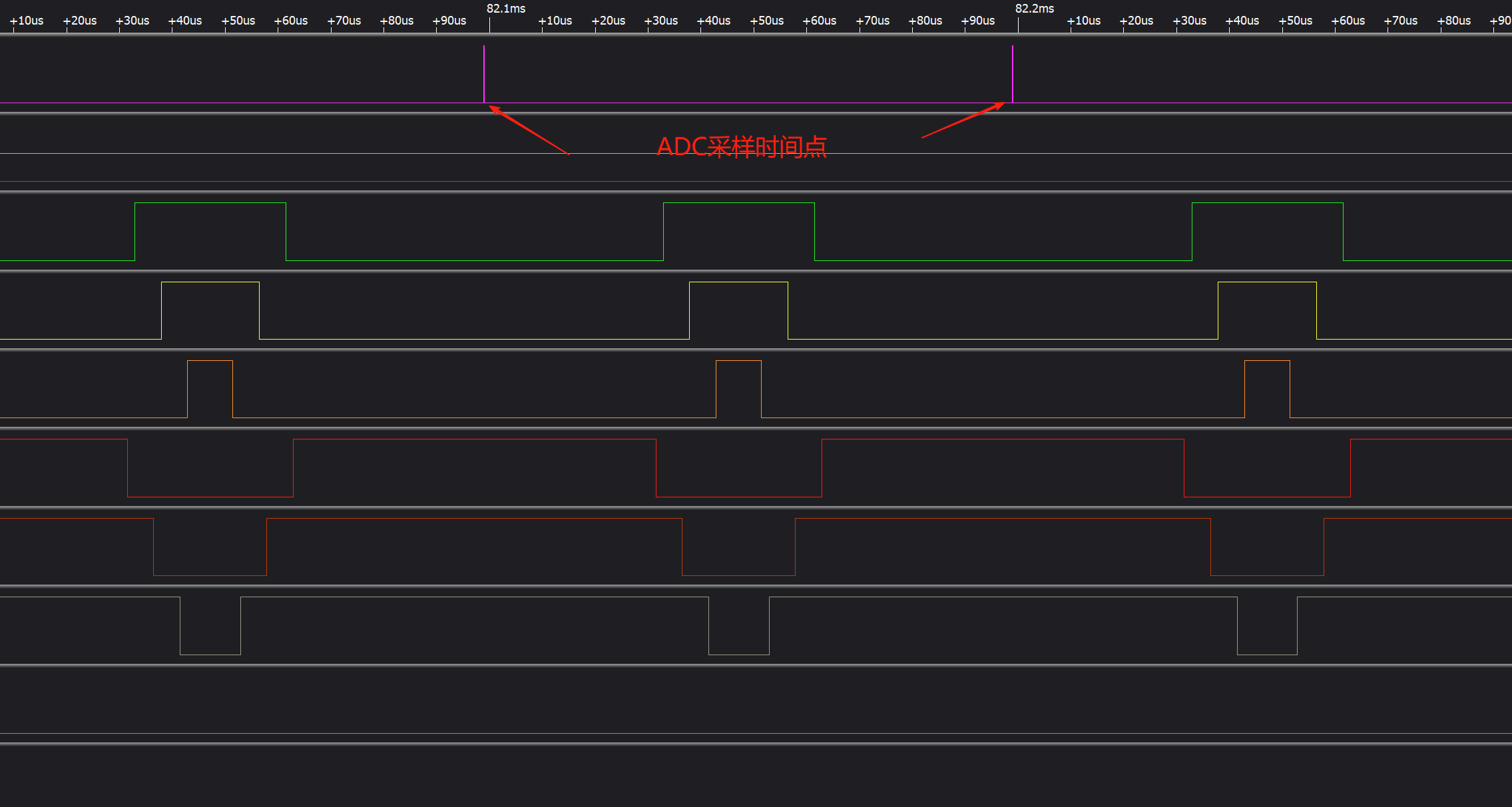
进一步分析ADC采样耗时,其中B1-B2=68.585us,一半的时间为34.2925us。但是实际ADC起来时间在36.045us,那1.7525us去哪呢?
看工程配置,目前ADC配置为170MHz,
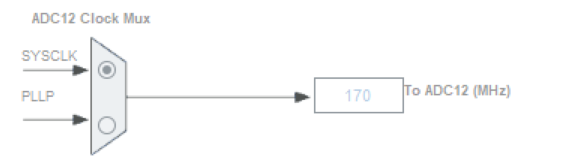
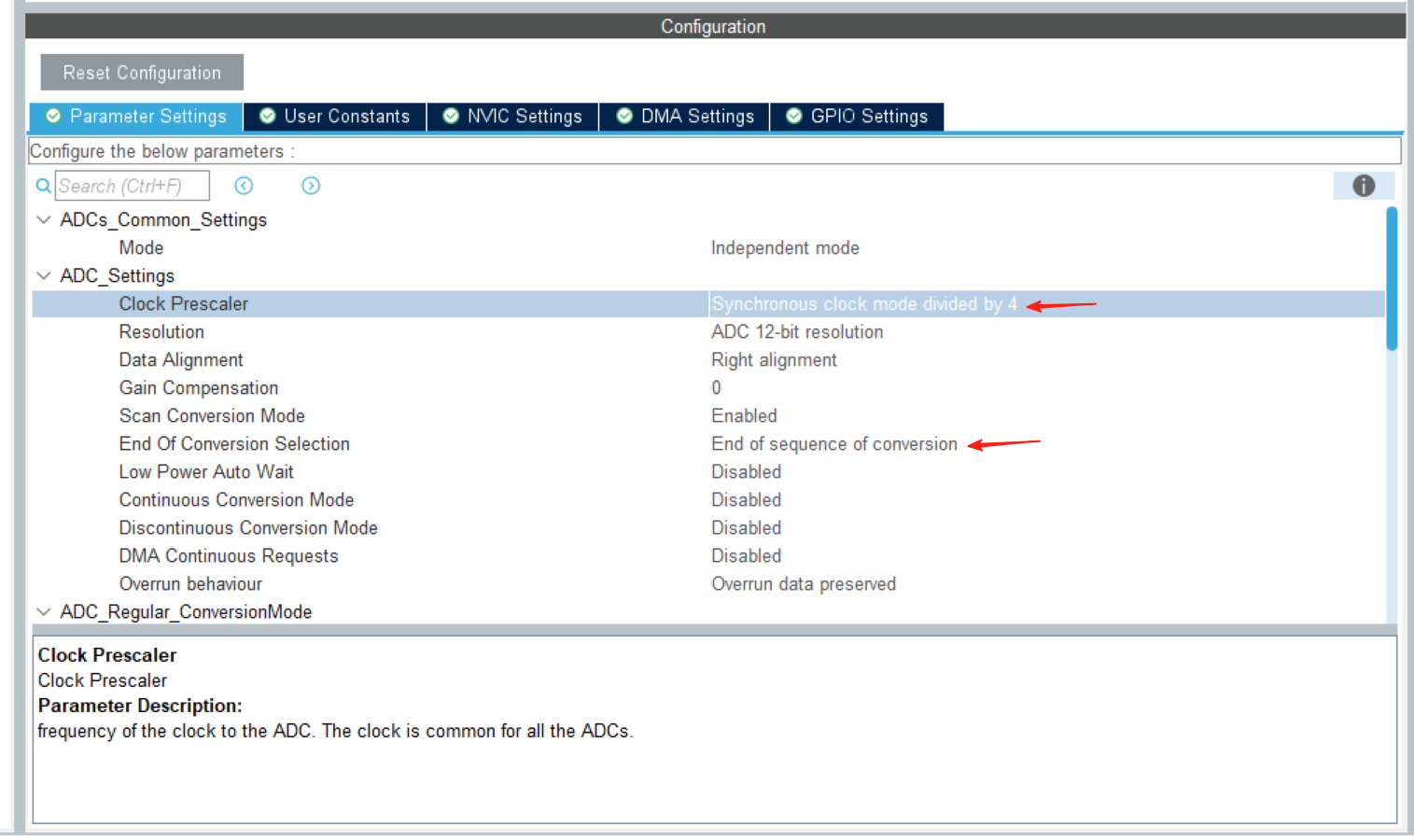
ADC的分频比为Div4,也就是ADC时钟为:170/4=42.5MHz。采样精度为12bit。
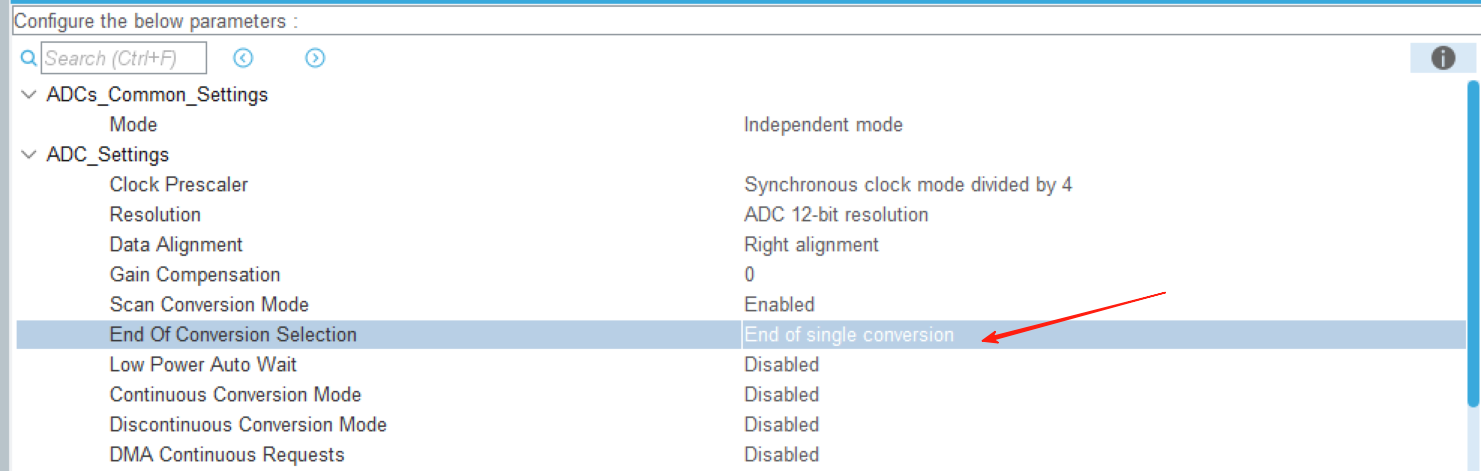
注意:End Of Conversion Selection配置为使能,确保中断到来时间点为采样结束之后。
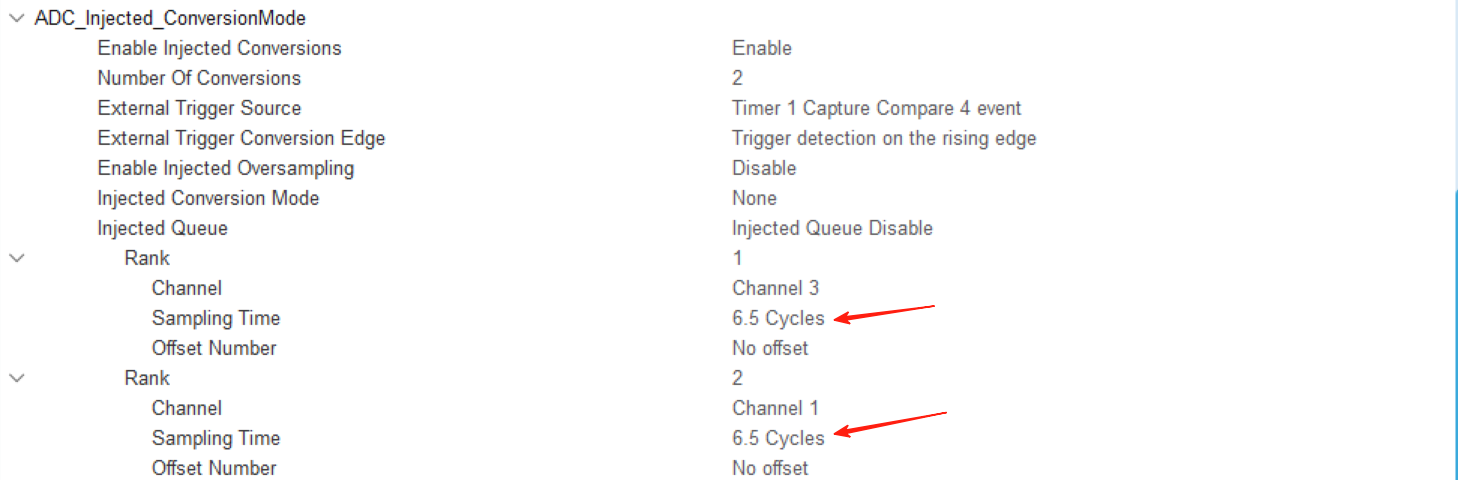
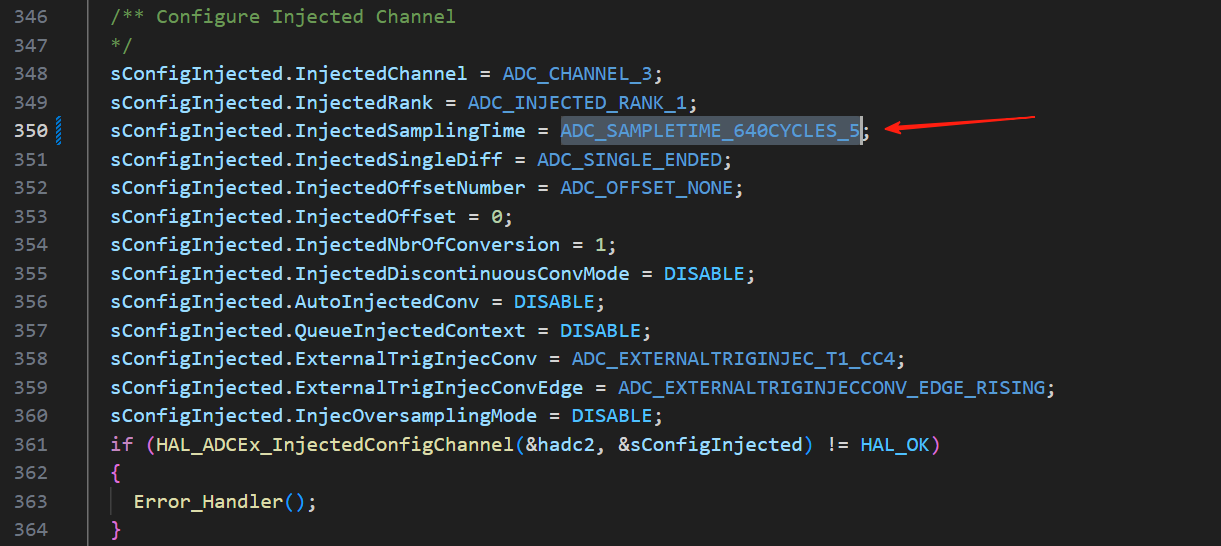
ADC1有2个Bank,ADC2只有1个Bank,主要看ADC1的,采样时间为6.5,一个ADC采样时间为:(6.5 + 12 + 0.5) / 42.5 = 0.447us。
两个采样为:0.894us,和1.7525us差值为0.8585us,有一定差距。考虑中断调度,拉信号线delay?
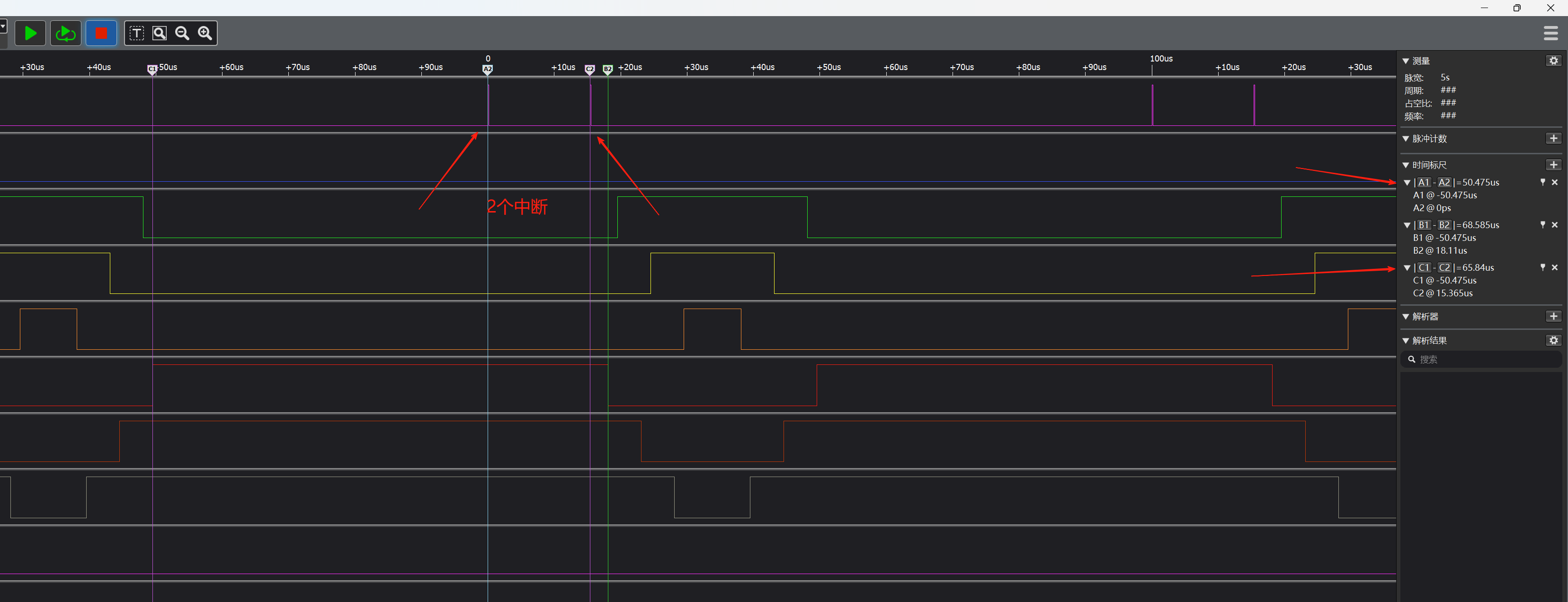
为避免这个影响,将cycle调大到640.5us。观察时间。
其中B1-B2=68.585us,一半的时间为34.2925us。但是实际ADC起来时间在65.88us,ADC转换用时31.5875us。
采样时间为640.5,一个ADC采样时间为:(640.5 + 12 + 0.5) / 42.5 = 15.365us。
两个采样为:30.729us,和31.5875us的差值为0.8585us,差值和之前的一样,那应该是硬件delay或者其他操作delay影响。
End Of Conversion Selection配置
这个如果配置为End of single conversion,会来2个中断,很多网上的程序这里配置是这个,因为ADC时间短,等代码去取ADC数据时,基本第二路ADC也取完了,但是当CPU很快,ADC时钟很慢时,取数据在中断开始就做的话,比较容易导致后面的ADC数据取的不对。
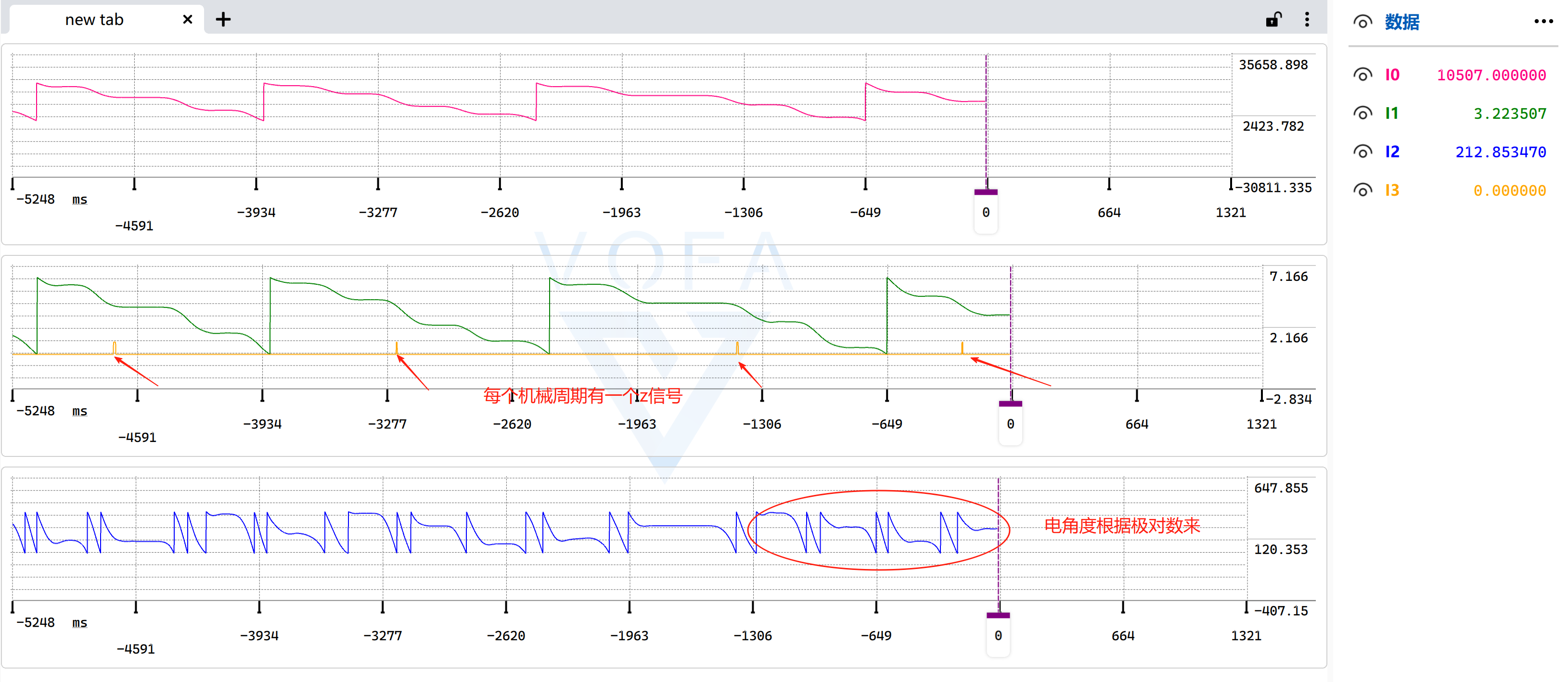
Encoder测试
这里用ABZ编码器,要确保每个机械周期都有1个Z信号。
电角度的周期和机械角度的倍数关系是极对数。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 29
29 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)