欧拉角:俯仰(Pitch)、横滚(Roll)和偏航(Yaw)角度
欧拉角是描述物体在三维空间中姿态的一种常用方法,通过三个角度值来表示物体相对于参考坐标系的旋转。在MPU6050 DMP应用中,欧拉角提供了直观的姿态信息。
·
目录
概述
欧拉角是描述物体在三维空间中姿态的一种常用方法,通过三个角度值来表示物体相对于参考坐标系的旋转。在MPU6050 DMP应用中,欧拉角提供了直观的姿态信息。
1 欧拉角基本概念
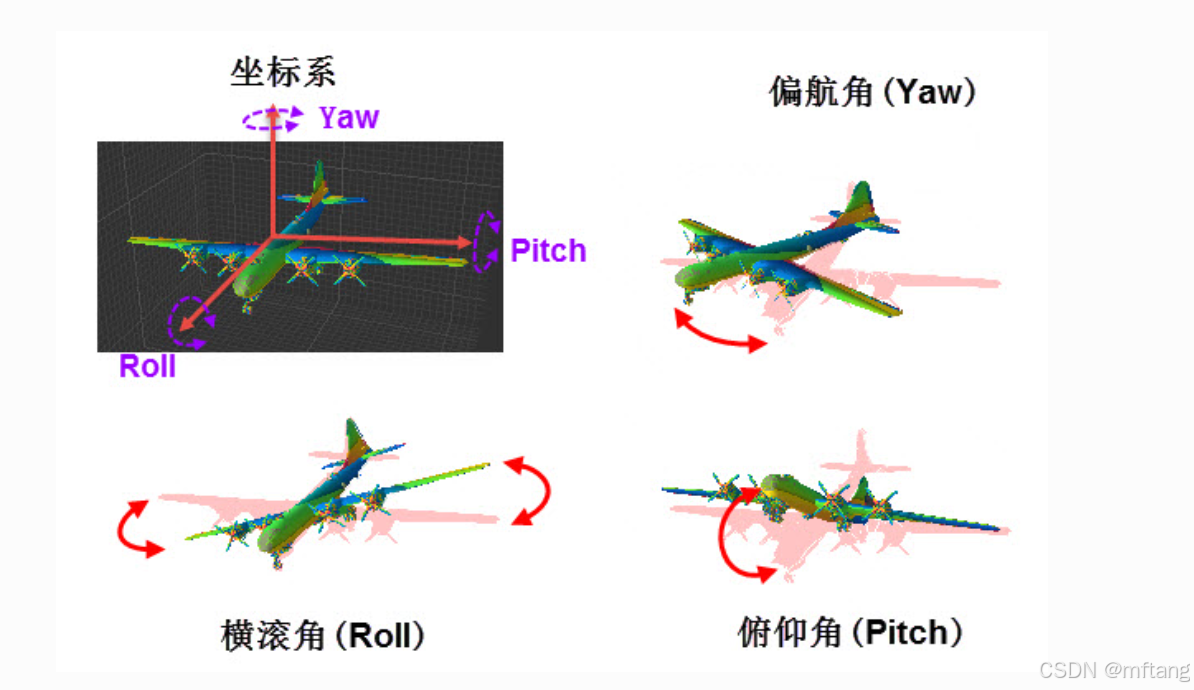
三个旋转角度:
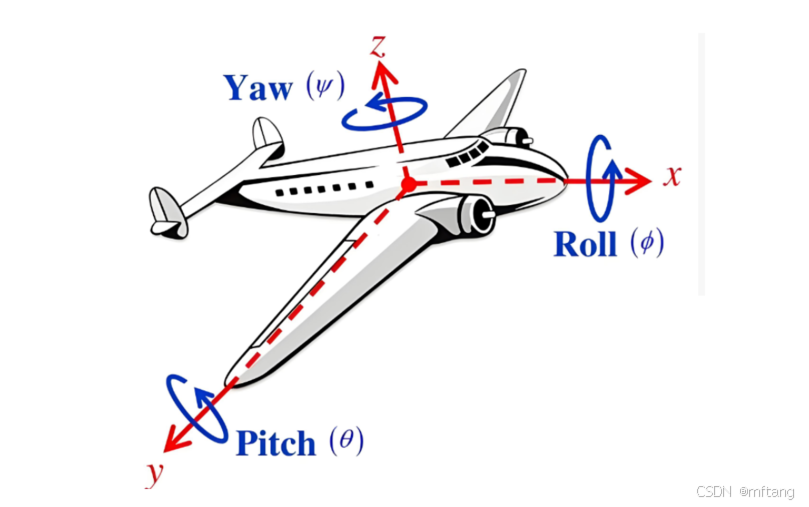
俯仰角(Pitch) - 绕y轴旋转的角度
描述"点头"动作
正值表示向前倾斜,负值表示向后倾斜
横滚角(Roll) - 绕x轴旋转的角度
描述"侧倾"动作
正值表示向右倾斜,负值表示向左倾斜
偏航角(Yaw) - 绕Z轴旋转的角度
描述"摇头"动作
正值表示向右转,负值表示向左转
2 从四元数计算欧拉角
MPU6050的DMP输出四元数数据,需要转换为更直观的欧拉角:
// 将四元数转换为欧拉角(弧度)
void QuaternionToEuler(float q0, float q1, float q2, float q3,
float* roll, float* pitch, float* yaw)
{
// 计算俯仰角 (pitch)
*pitch = asin(2.0f * (q0 * q2 - q3 * q1));
// 计算横滚角 (roll)
*roll = atan2(2.0f * (q0 * q1 + q2 * q3),
1.0f - 2.0f * (q1 * q1 + q2 * q2));
// 计算偏航角 (yaw)
*yaw = atan2(2.0f * (q0 * q3 + q1 * q2),
1.0f - 2.0f * (q2 * q2 + q3 * q3));
}
// 将弧度转换为角度
void RadiansToDegrees(float* roll, float* pitch, float* yaw)
{
*roll *= 57.295779513f; // 180/π
*pitch *= 57.295779513f;
*yaw *= 57.295779513f;
}3 欧拉角的实际应用
3.1 姿态显示和监控
// 显示欧拉角姿态
void DisplayEulerAngles(float roll, float pitch, float yaw)
{
printf("Roll: %.2f°\n", roll);
printf("Pitch: %.2f°\n", pitch);
printf("Yaw: %.2f°\n\n", yaw);
// 简单的文本姿态指示器
printf("姿态: ");
if (fabs(roll) < 5.0f && fabs(pitch) < 5.0f) {
printf("水平");
} else if (pitch > 30.0f) {
printf("前倾");
} else if (pitch < -30.0f) {
printf("后仰");
} else if (roll > 30.0f) {
printf("右倾");
} else if (roll < -30.0f) {
printf("左倾");
}
printf("\n\n");
}3.2 姿态控制应用
// 基于欧拉角的简单平衡控制
typedef struct {
float kp; // 比例系数
float ki; // 积分系数
float kd; // 微分系数
float error_sum; // 误差积分
float last_error;// 上次误差
} PIDController;
void Init_PID(PIDController* pid, float kp, float ki, float kd)
{
pid->kp = kp;
pid->ki = ki;
pid->kd = kd;
pid->error_sum = 0;
pid->last_error = 0;
}
float Update_PID(PIDController* pid, float setpoint, float current_value, float dt)
{
float error = setpoint - current_value;
pid->error_sum += error * dt;
float derivative = (error - pid->last_error) / dt;
pid->last_error = error;
return pid->kp * error + pid->ki * pid->error_sum + pid->kd * derivative;
}
// 自平衡机器人控制示例
void BalanceRobotControl(float pitch, float roll)
{
static PIDController pitch_pid, roll_pid;
static bool initialized = false;
if (!initialized) {
Init_PID(&pitch_pid, 1.0f, 0.1f, 0.2f); // 俯仰PID参数
Init_PID(&roll_pid, 1.0f, 0.1f, 0.2f); // 横滚PID参数
initialized = true;
}
float dt = 0.01f; // 假设10ms控制周期
// 计算控制输出 (目标是保持0度,即水平)
float pitch_output = Update_PID(&pitch_pid, 0.0f, pitch, dt);
float roll_output = Update_PID(&roll_pid, 0.0f, roll, dt);
// 应用控制输出到电机
ApplyMotorControl(pitch_output, roll_output);
}3.3 姿态限制和安全检查
// 检查姿态是否在安全范围内
typedef struct {
float max_roll;
float max_pitch;
float max_yaw_rate;
} AttitudeLimits;
bool CheckAttitudeSafety(float roll, float pitch, float yaw_rate, AttitudeLimits limits)
{
// 检查横滚角是否超出限制
if (fabs(roll) > limits.max_roll) {
printf("警告: 横滚角超出限制! %.2f° > %.2f°\n", fabs(roll), limits.max_roll);
return false;
}
// 检查俯仰角是否超出限制
if (fabs(pitch) > limits.max_pitch) {
printf("警告: 俯仰角超出限制! %.2f° > %.2f°\n", fabs(pitch), limits.max_pitch);
return false;
}
// 检查偏航角变化率是否过大
static float last_yaw = 0;
static uint32_t last_time = 0;
uint32_t current_time = HAL_GetTick();
float dt = (current_time - last_time) / 1000.0f; // 转换为秒
if (dt > 0) {
float yaw_rate_calculated = fabs(yaw_rate - last_yaw) / dt;
if (yaw_rate_calculated > limits.max_yaw_rate) {
printf("警告: 偏航角变化过快! %.2f°/s > %.2f°/s\n",
yaw_rate_calculated, limits.max_yaw_rate);
return false;
}
}
last_yaw = yaw_rate;
last_time = current_time;
return true;
}3.4 数据滤波和平滑处理
// 欧拉角的滤波处理
typedef struct {
float roll;
float pitch;
float yaw;
float alpha; // 滤波系数
} FilteredEulerAngles;
void InitEulerFilter(FilteredEulerAngles* filter, float alpha)
{
filter->roll = 0;
filter->pitch = 0;
filter->yaw = 0;
filter->alpha = alpha;
}
void UpdateEulerFilter(FilteredEulerAngles* filter, float new_roll, float new_pitch, float new_yaw)
{
// 应用一阶低通滤波
filter->roll = filter->alpha * new_roll + (1 - filter->alpha) * filter->roll;
filter->pitch = filter->alpha * new_pitch + (1 - filter->alpha) * filter->pitch;
filter->yaw = filter->alpha * new_yaw + (1 - filter->alpha) * filter->yaw;
}
// 处理角度跳变(超过180度的情况)
float NormalizeAngle(float angle)
{
while (angle > 180.0f) angle -= 360.0f;
while (angle < -180.0f) angle += 360.0f;
return angle;
}3.5 姿态历史记录和趋势分析
// 记录姿态历史用于分析
#define HISTORY_SIZE 100
typedef struct {
float roll[HISTORY_SIZE];
float pitch[HISTORY_SIZE];
float yaw[HISTORY_SIZE];
int index;
} AttitudeHistory;
void InitAttitudeHistory(AttitudeHistory* history)
{
for (int i = 0; i < HISTORY_SIZE; i++) {
history->roll[i] = 0;
history->pitch[i] = 0;
history->yaw[i] = 0;
}
history->index = 0;
}
void UpdateAttitudeHistory(AttitudeHistory* history, float roll, float pitch, float yaw)
{
history->roll[history->index] = roll;
history->pitch[history->index] = pitch;
history->yaw[history->index] = yaw;
history->index = (history->index + 1) % HISTORY_SIZE;
}
// 计算姿态变化趋势
void CalculateAttitudeTrend(AttitudeHistory* history, float* roll_trend, float* pitch_trend, float* yaw_trend)
{
float roll_sum = 0, pitch_sum = 0, yaw_sum = 0;
int count = HISTORY_SIZE;
for (int i = 0; i < count; i++) {
roll_sum += history->roll[i];
pitch_sum += history->pitch[i];
yaw_sum += history->yaw[i];
}
// 简单趋势计算:当前值与平均值的差异
*roll_trend = history->roll[(history->index - 1 + HISTORY_SIZE) % HISTORY_SIZE] - (roll_sum / count);
*pitch_trend = history->pitch[(history->index - 1 + HISTORY_SIZE) % HISTORY_SIZE] - (pitch_sum / count);
*yaw_trend = history->yaw[(history->index - 1 + HISTORY_SIZE) % HISTORY_SIZE] - (yaw_sum / count);
}4 注意事项和最佳实践
万向节锁问题:当俯仰角接近±90°时,横滚和偏航会失去一个自由度,导致万向节锁。在这种情况下,考虑使用四元数代替欧拉角。
角度归一化:始终将角度归一化到-180°到+180°范围,避免角度跳变。
坐标系定义:明确MPU6050的安装方向和坐标系定义,确保欧拉角的解释正确。
滤波选择:根据应用需求选择合适的滤波算法和参数,平衡响应速度和稳定性。
单位一致性:在整个系统中保持角度单位的一致性(度或弧度)。
通过合理使用欧拉角,可以开发出直观且响应迅速的姿态感知应用,如无人机飞行控制、机器人平衡、虚拟现实交互等。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 8
8 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)