ROS 发展现状:历史、生态、版本路线与落地清单
ROS 2 以 DDS 为内核,在通信 QoS、安全、实时性、跨平台与嵌入式(micro-ROS)方面补齐工程短板,配合 LTS 发行节奏成为主流。2025 年之后,ROS 1 已收官,建议尽快完成向 ROS 2 的迁移,并把 QoS、安全与实时能力纳入工程基线。依托 DDS Security(加密、认证与访问控制),配合 sros2 工具链实现证书与策略管理,满足车规、工业与云边协同。密钥与策略
摘要:ROS 自 2007 年兴起,2025 年 ROS 1 正式收官,重心全面转向 ROS 2。ROS 2 以 DDS 为内核,在通信 QoS、安全、实时性、跨平台与嵌入式(micro-ROS)方面补齐工程短板,配合 LTS 发行节奏成为主流。本文给出发展脉络、版本选择、迁移要点与工程落地清单。
1. 历史与里程碑
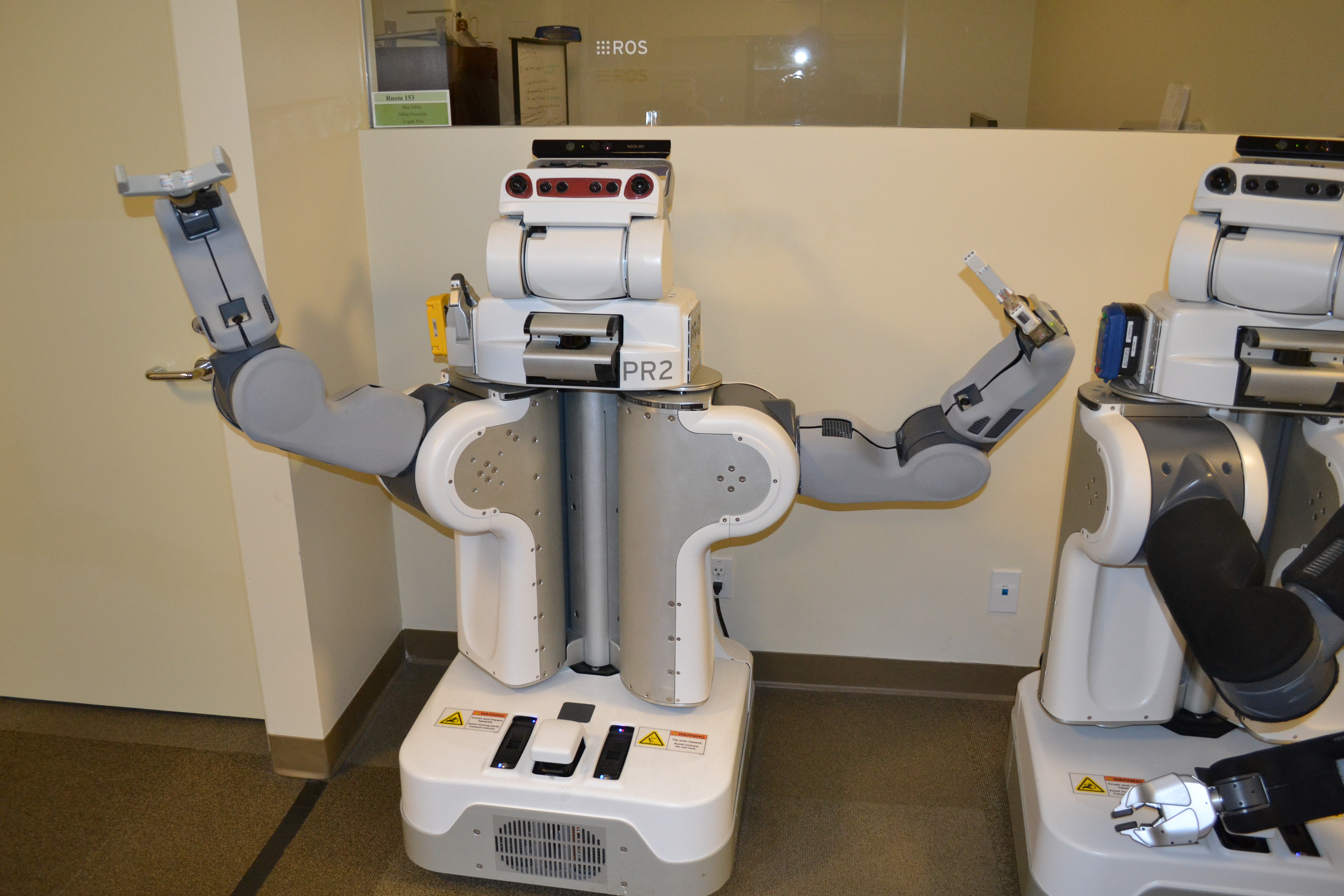
早期由 Willow Garage 推动,PR2 在抓取、移动与协作任务上沉淀了大量可复用软件栈,成为学研界的示范平台;随后社区由 OSRF/Open Robotics 接棒,生态持续扩张。在高可靠场景中,Robonaut 2(R2)在国际空间站进行在轨验证,展示了在严苛环境中的远程操作与人机协作能力。自动驾驶方向上,Autoware 依托 ROS 生态逐步完善,从感知到路径规划与控制形成可视化工作流。
PR2 研究平台
Robonaut 2 在国际空间站与宇航员 Dan Burbank

2. 一句话现状(2025)
• ROS 1 Noetic 已结束生命周期(EOL),建议迁移至 ROS 2。
• ROS 2 已成为主流开发与部署平台,生态与工具链以 ROS 2 为中心演进。
• 版本选型:生产优先 Jazzy Jalisco(LTS,支持期≈5 年);探索/验证可用 Kilted Kaiju(短支持)。

3. 为什么转向 ROS 2(工程视角)
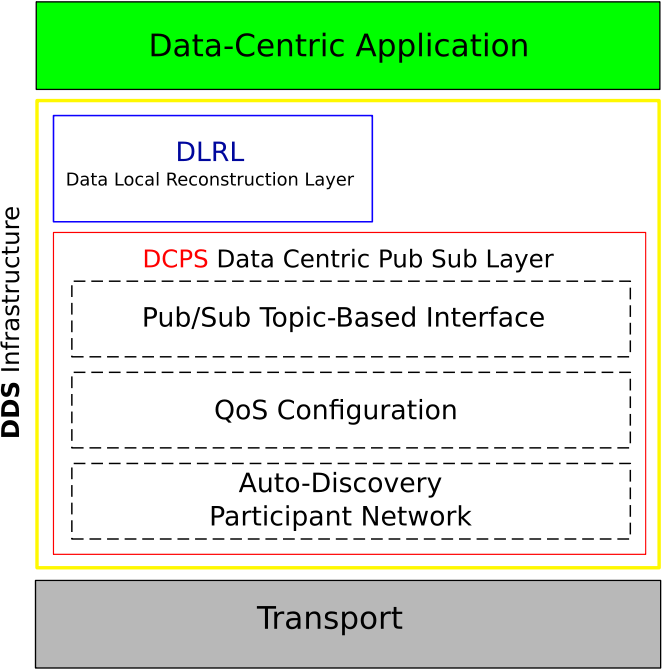
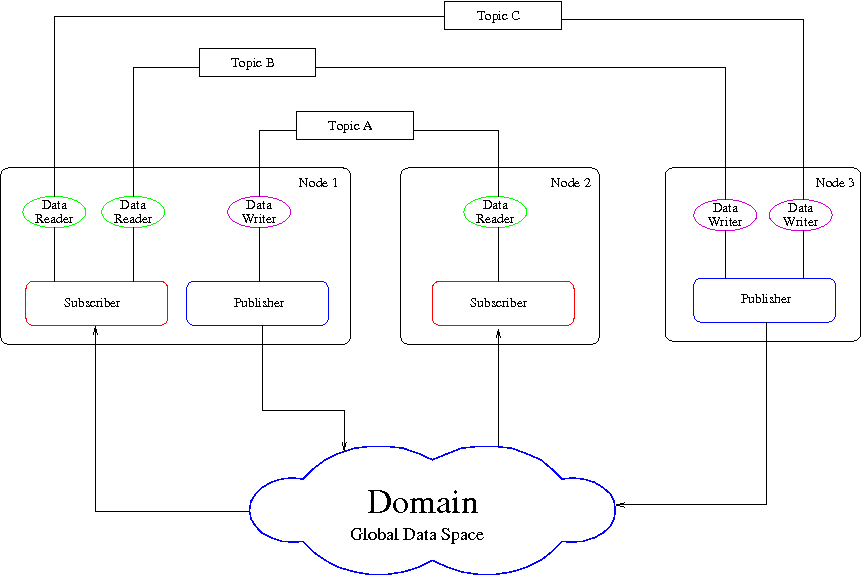
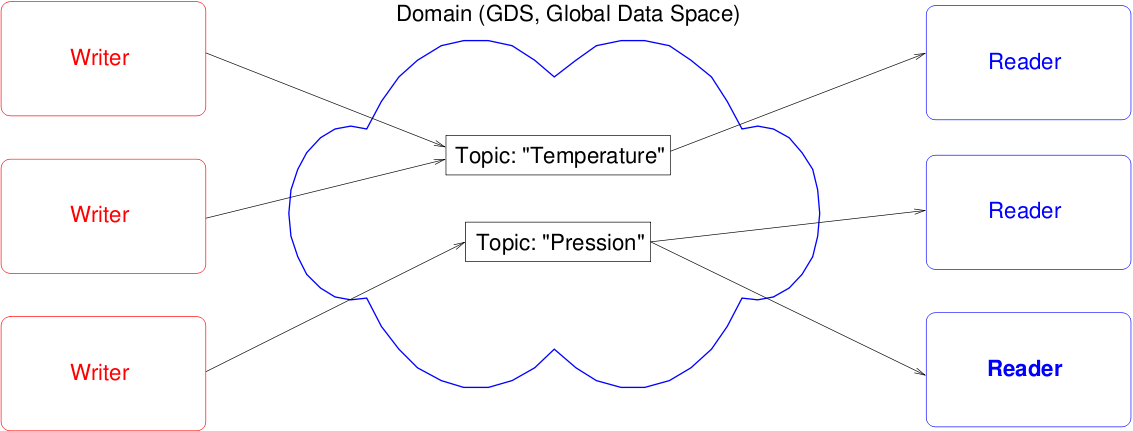
3.1 通信内核:DDS + QoS
基于 DDS 的发布订阅中间件,提供可靠性、历史深度、消息寿命等 QoS 组合,可覆盖“TCP 级可靠”与“UDP 级尽力而为”的不同需求。
3.2 安全
依托 DDS Security(加密、认证与访问控制),配合 sros2 工具链实现证书与策略管理,满足车规、工业与云边协同。
3.3 实时与确定性
提供实时编程指南(优先级、锁页内存、避免运行期动态分配与阻塞 I/O),降低关键链路抖动并提升确定性。
3.4 平台矩阵与嵌入式
按 REP-2000 管理平台支持层级(Tier-1/2/3);micro-ROS(DDS-XRCE)将 ROS 2 能力下沉至 MCU/RTOS 场景,统一消息模型。
4. 发行版节奏与 2025 选型
• 节奏:每年 5 月 23 日发布新版本;偶数年为 LTS(≈5 年),奇数年为标准发行(≈18 个月);Rolling 持续演进。
• 推荐:生产优先 Jazzy(LTS),分支上评估 Kilted 新特性并保持回迁至下一个 LTS。
5. 从 ROS 1 迁移到 ROS 2:行动清单
1) 梳理接口:列出话题/服务/动作/参数,先迁移消息定义与数据约定。
2) 桥接过渡:使用 ros1_bridge 双栈互通,逐步切换关键链路。
3) QoS/安全基线:控制与状态链路采用 reliable + depth;跨主机/弱网启用 DDS-Security。
4) 实时化:按官方实践改造关键路径;建立端到端延迟/抖动度量体系。
5) 平台与打包:对齐 REP-2000 目标平台矩阵,容器化交付并在 CI 覆盖仿真与回放用例。
6. 工程落地清单
• 通信与 QoS:控制/状态选择 reliable + keep_last(depth≥10);高频传感器 best_effort + keep_last(depth 基于频率取舍);定期压测 ros2 topic hz/bw/delay。
• 安全上线:使用 sros2 生成与轮转证书,按命名空间细化访问策略;密钥与策略文件纳入版本控制。
• 实时与可观测性:避免运行期动态分配与阻塞 I/O;锁页内存与调度优先级配置;建立端到端延迟仪表板。
• 平台与分发:生产优先 Jazzy(LTS);Rolling/非 LTS 用于特性验证;按 REP-2000 约束维护支持矩阵。
• 嵌入式接入:MCU 侧通过 micro-ROS(DDS-XRCE)与上位机互通,统一消息模型与调度
结语
2025 年之后,ROS 1 已收官,建议尽快完成向 ROS 2 的迁移,并把 QoS、安全与实时能力纳入工程基线。生产环境优先选择 Jazzy(LTS)作为稳定基座,探索性功能可在分支上评估并规划回迁到 LTS 的路线。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)