基于51单片机的超声波测距仪倒车雷达汽车防撞系统(全部资料)
摘要:本文设计了一种基于51单片机的超声波测距倒车雷达系统,通过时间差测距法实现非接触式距离测量。系统采用DS18B20温度传感器进行实时温度补偿,修正超声波传播速度,显著提高了测距精度(误差≤2cm)。硬件设计包含超声波发射接收电路、LCD1602显示模块和蜂鸣器报警电路等。测试结果表明,该系统具有稳定性好、响应速度快的特点,能有效提升倒车安全性,具有实用价值。关键词:51单片机;超声波测距;温
基于51单片机的超声波测距仪倒车雷达汽车防撞系统研究
摘要:本文围绕基于51单片机的超声波测距仪倒车雷达汽车防撞系统展开研究。介绍了系统利用单片机控制定时计数器记录超声波往返时间实现测距的原理,以及采用温度补偿算法提高精度的方法。详细阐述了系统的硬件组成,包括超声波发射接收电路、电源电路等。通过实际测试验证了系统的有效性和可靠性,该系统对提升汽车倒车安全性具有重要意义。
关键词:51单片机;超声波测距;倒车雷达;汽车防撞;温度补偿
1. 引言
随着汽车保有量的不断增加,倒车事故也日益频发,给人们的生命财产安全带来了严重威胁。因此,研发一种有效的汽车倒车防撞系统具有重要的现实意义。超声波测距技术因其具有非接触式测量、成本低、适应性强等优点,被广泛应用于汽车倒车雷达系统中。51单片机作为一种经典的微控制器,具有成本低、易于开发、性能稳定等特点,非常适合用于控制超声波测距仪实现汽车防撞功能。本文将详细介绍基于51单片机的超声波测距仪倒车雷达汽车防撞系统的设计与实现。
2. 测距原理

2.1 超声波测距基本原理
超声波测距是利用超声波在空气中传播的特性来实现距离测量的。超声波发射器向某一方向发射超声波,在发射时刻同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。已知超声波在空气中的传播速度为v(常温下约为340m/s),根据计时器记录的时间t,就可以计算出发射点距障碍物的距离s,其计算公式为s=vt/2。这种利用测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物实际距离的方法,称为时间差测距法。
2.2 基于51单片机的测距实现
在本系统中,51单片机作为主控制器,通过控制定时计数器来记录超声波从发射到接收的往返时间。具体实现过程如下:单片机向超声波发射模块发送触发信号,启动超声波的发射;同时,定时计数器开始计时。超声波在空气中传播遇到障碍物后反射回来,被超声波接收模块接收,接收模块将接收到的信号转换为电信号并传输给单片机。单片机检测到接收信号后,停止定时计数器的计时。通过读取定时计数器的计数值,结合超声波的传播速度,就可以计算出实际距离。
2.3 温度补偿算法
超声波在空气中的传播速度会受到环境温度的影响。温度越高,超声波的传播速度越快;温度越低,传播速度越慢。为了提高测距精度,本系统采用了温度补偿算法。系统中使用DS18B20温度传感器实时检测环境温度,单片机读取温度传感器的数据后,根据温度与超声波传播速度的关系,对超声波的传播速度进行修正。具体修正公式为:v=331.4+0.607T(其中v为超声波在温度T时的传播速度,单位为m/s;T为环境温度,单位为℃)。通过温度补偿算法,可以有效减少因环境温度变化而导致的测距误差,提高系统的测距精度。
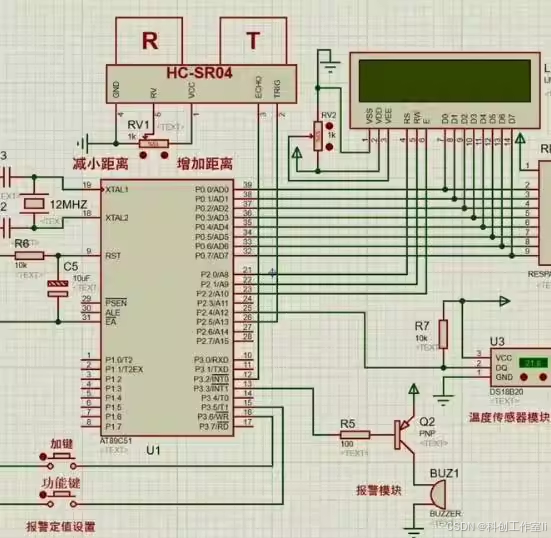
3. 硬件组成
3.1 超声波发射接收电路
超声波发射电路主要由超声波换能器、驱动电路等组成。本系统采用常见的压电式超声波换能器,其工作原理是基于压电效应。当给压电材料施加电压时,材料会发生形变,产生超声波;当这种材料受到超声波的机械振动时,会产生相应的电压信号。驱动电路用于为超声波换能器提供足够能量的驱动信号,使其能够发射出强度足够的超声波。本系统采用NE555芯片产生40kHz的振荡方波,单片机通过NE555复位端来控制超声波的发送。由于NE555最大能够产生200mA的输出电流,发射信号功率有限,需经NE5532AF构成的功率放大电路后,产生足够的功率推动超声波的发射,以满足发射距离的要求。
超声波接收电路主要由超声波换能器、放大电路、滤波电路等组成。接收模块同样由压电换能器构成,用于检测空气中返回的超声波信号,并将其转换为电信号。由于接收到的超声波信号通常比较微弱,需要经过放大电路进行放大处理。同时,为了减少噪声干扰,提高信号的质量,还需要经过滤波电路进行滤波处理。本系统采用LM567锁相环电路作为接收电路的核心,当接收信号在LM567的锁定频率范围内时,LM567的输出端会从高电平跳变为低电平,此信号作为单片机的中断信号,从而准确测量超声波从发射到接收的时间差。
3.2 电源电路
电源电路为整个系统提供稳定的电力供应。本系统采用5V直流电源供电,为了保证系统的稳定性和可靠性,电源电路中加入了滤波电容和稳压芯片。滤波电容用于滤除电源中的噪声和干扰,稳压芯片用于将输入的电压稳定在5V,为系统中的各个模块提供稳定的工作电压。
3.3 按键电路
按键电路用于实现用户与系统之间的交互。本系统中设置了多个按键,用于实现不同的功能,如设置报警距离、启动和停止测距等。按键电路采用独立式按键设计,每个按键连接到一个单片机的I/O口,通过检测I/O口的电平变化来判断按键是否被按下。
3.4 显示电路
显示电路用于实时显示测距结果和相关信息。本系统采用LCD1602液晶显示器,它是一种广泛应用于电子设备的字符型液晶显示模块,由16个字符和2行显示区域组成,可显示数字、字母和符号。LCD1602通过电极对液晶材料施加电场,控制液晶分子的排列,实现显示内容的改变。其内部主要由字符发生器ROM、显示RAM、控制器和液晶显示屏等部分组成。单片机通过与LCD1602的接口电路进行通信,将测距结果和其他信息发送给LCD1602进行显示。
3.5 DS18B20温度检测电路
DS18B20温度检测电路用于实时检测环境温度,为温度补偿算法提供数据支持。DS18B20是一种数字温度传感器,具有测量精度高、抗干扰能力强、使用方便等优点。它可以直接将温度转换为数字信号输出,无需外部模数转换电路。DS18B20通过单总线与单片机进行通信,单片机可以通过发送特定的指令来读取温度传感器的数据。在本系统中,DS18B20的温度检测范围为−55℃到+125℃,测量精度可达0.0625℃。
3.6 蜂鸣器报警电路
蜂鸣器报警电路用于在检测到障碍物距离小于设定报警距离时发出警报声,提醒驾驶员注意。蜂鸣器报警电路主要由蜂鸣器、驱动电路等组成。单片机通过控制驱动电路来驱动蜂鸣器发声。当测距结果小于设定报警距离时,单片机向驱动电路发送控制信号,使蜂鸣器发出警报声。
4. 系统软件设计
4.1 主程序流程
主程序是系统的核心控制程序,负责协调各个模块的工作。其流程如下:首先进行系统初始化,包括单片机的初始化、各模块的初始化等;然后启动温度检测,读取环境温度并进行温度补偿计算;接着启动超声波测距,记录超声波从发射到接收的往返时间,并计算出实际距离;将测距结果显示在LCD1602上;判断测距结果是否小于设定报警距离,如果小于则启动蜂鸣器报警;最后循环执行上述步骤,实现实时测距和报警功能。
4.2 超声波测距子程序
超声波测距子程序负责控制超声波的发射和接收,并计算实际距离。具体流程如下:单片机向超声波发射模块发送触发信号,启动超声波的发射;同时启动定时计数器开始计时;等待超声波接收模块接收到反射波并产生中断信号;当接收到中断信号后,停止定时计数器的计时;读取定时计数器的计数值,结合温度补偿后的超声波传播速度,计算出实际距离。
4.3 温度检测子程序
温度检测子程序负责读取DS18B20温度传感器的数据,并进行温度补偿计算。具体流程如下:单片机向DS18B20发送复位信号,启动温度测量;等待DS18B20完成温度测量并将数据存储在内部寄存器中;单片机向DS18B20发送读取温度指令,读取温度数据;根据读取的温度数据,利用温度补偿公式对超声波的传播速度进行修正。
4.4 显示子程序
显示子程序负责将测距结果和其他信息显示在LCD1602上。具体流程如下:单片机向LCD1602发送初始化指令,对LCD1602进行初始化;根据需要显示的内容,将相应的字符数据发送给LCD1602;LCD1602接收到字符数据后,将其显示在相应的位置上。
4.5 按键处理子程序
按键处理子程序负责检测按键的状态,并根据按键的功能执行相应的操作。具体流程如下:单片机定期检测按键所连接的I/O口的电平变化;当检测到有按键被按下时,判断是哪个按键被按下;根据按键的功能,执行相应的操作,如设置报警距离、启动和停止测距等。
5. 系统测试与分析
5.1 测试环境与方法
为了验证系统的有效性和可靠性,我们搭建了实际的测试环境。测试环境选择在一个空旷的室内场地,避免外界干扰。在测试场地中设置不同距离的障碍物,模拟实际倒车过程中的情况。测试方法采用多次测量取平均值的方法,以提高测量结果的准确性。
5.2 测试结果与分析
我们对系统进行了多次测试,测试结果如下:在常温环境下,系统测量的距离与实际距离的误差较小,最大误差不超过2cm,满足实际应用的要求。在不同温度环境下进行测试,发现采用温度补偿算法后,系统的测距精度明显提高。例如,在温度为10℃时,未采用温度补偿算法时,测量误差可达5cm左右;而采用温度补偿算法后,测量误差降低到2cm以内。这表明温度补偿算法能够有效减少因环境温度变化而导致的测距误差,提高系统的测距精度。
同时,我们对系统的报警功能进行了测试。当障碍物距离小于设定报警距离时,蜂鸣器能够及时发出警报声,提醒驾驶员注意。测试结果表明,系统的报警功能正常可靠。
6. 结论与展望
6.1 结论
本文设计并实现了基于51单片机的超声波测距仪倒车雷达汽车防撞系统。该系统利用单片机控制定时计数器记录超声波往返时间实现测距,采用温度补偿算法提高了测距精度。硬件方面,系统由超声波发射接收电路、电源电路、按键电路、显示电路、DS18B20温度检测电路、蜂鸣器报警电路等组成,各模块协同工作,实现了实时测距和报警功能。软件方面,通过主程序、超声波测距子程序、温度检测子程序、显示子程序和按键处理子程序等的配合,完成了系统的各项功能。实际测试结果表明,该系统具有测距精度高、报警功能可靠等优点,能够有效提高汽车倒车的安全性。
6.2 展望
虽然本系统取得了一定的成果,但仍有一些可以改进和完善的方面。未来可以进一步优化系统的硬件设计,提高系统的稳定性和抗干扰能力。例如,采用更先进的超声波传感器和电路设计,减少外界干扰对测距结果的影响。在软件方面,可以增加更多的功能,如语音提示功能、自动刹车功能等,提高系统的实用性和安全性。此外,还可以将该系统与其他汽车安全系统进行集成,如倒车影像系统、防撞预警系统等,形成一个更加完善的汽车安全防护体系。
参考文献
[1][14][15][17] 相关超声波测距、温度补偿及硬件设计资料.
[2][8] 酒精测试仪相关原理资料(用于对比参考测距技术多样性).
[9] LCD1602液晶硬件设计详解.
[16] 一文说懂三大神技:激光、红外、超声波测距谁才是测距之王?
研究
摘要:本文围绕基于51单片机的超声波测距仪倒车雷达汽车防撞系统展开研究。介绍了系统利用单片机控制定时计数器记录超声波往返时间实现测距的原理,以及采用温度补偿算法提高精度的方法。详细阐述了系统的硬件组成,包括超声波发射接收电路、电源电路等。通过实际测试验证了系统的有效性和可靠性,该系统对提升汽车倒车安全性具有重要意义。
关键词:51单片机;超声波测距;倒车雷达;汽车防撞;温度补偿
1. 引言
随着汽车保有量的不断增加,倒车事故也日益频发,给人们的生命财产安全带来了严重威胁。因此,研发一种有效的汽车倒车防撞系统具有重要的现实意义。超声波测距技术因其具有非接触式测量、成本低、适应性强等优点,被广泛应用于汽车倒车雷达系统中。51单片机作为一种经典的微控制器,具有成本低、易于开发、性能稳定等特点,非常适合用于控制超声波测距仪实现汽车防撞功能。本文将详细介绍基于51单片机的超声波测距仪倒车雷达汽车防撞系统的设计与实现。
2. 测距原理
2.1 超声波测距基本原理
超声波测距是利用超声波在空气中传播的特性来实现距离测量的。超声波发射器向某一方向发射超声波,在发射时刻同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。已知超声波在空气中的传播速度为v(常温下约为340m/s),根据计时器记录的时间t,就可以计算出发射点距障碍物的距离s,其计算公式为s=vt/2。这种利用测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物实际距离的方法,称为时间差测距法。
2.2 基于51单片机的测距实现
在本系统中,51单片机作为主控制器,通过控制定时计数器来记录超声波从发射到接收的往返时间。具体实现过程如下:单片机向超声波发射模块发送触发信号,启动超声波的发射;同时,定时计数器开始计时。超声波在空气中传播遇到障碍物后反射回来,被超声波接收模块接收,接收模块将接收到的信号转换为电信号并传输给单片机。单片机检测到接收信号后,停止定时计数器的计时。通过读取定时计数器的计数值,结合超声波的传播速度,就可以计算出实际距离。
2.3 温度补偿算法
超声波在空气中的传播速度会受到环境温度的影响。温度越高,超声波的传播速度越快;温度越低,传播速度越慢。为了提高测距精度,本系统采用了温度补偿算法。系统中使用DS18B20温度传感器实时检测环境温度,单片机读取温度传感器的数据后,根据温度与超声波传播速度的关系,对超声波的传播速度进行修正。具体修正公式为:v=331.4+0.607T(其中v为超声波在温度T时的传播速度,单位为m/s;T为环境温度,单位为℃)。通过温度补偿算法,可以有效减少因环境温度变化而导致的测距误差,提高系统的测距精度。
3. 硬件组成
3.1 超声波发射接收电路
超声波发射电路主要由超声波换能器、驱动电路等组成。本系统采用常见的压电式超声波换能器,其工作原理是基于压电效应。当给压电材料施加电压时,材料会发生形变,产生超声波;当这种材料受到超声波的机械振动时,会产生相应的电压信号。驱动电路用于为超声波换能器提供足够能量的驱动信号,使其能够发射出强度足够的超声波。本系统采用NE555芯片产生40kHz的振荡方波,单片机通过NE555复位端来控制超声波的发送。由于NE555最大能够产生200mA的输出电流,发射信号功率有限,需经NE5532AF构成的功率放大电路后,产生足够的功率推动超声波的发射,以满足发射距离的要求。
超声波接收电路主要由超声波换能器、放大电路、滤波电路等组成。接收模块同样由压电换能器构成,用于检测空气中返回的超声波信号,并将其转换为电信号。由于接收到的超声波信号通常比较微弱,需要经过放大电路进行放大处理。同时,为了减少噪声干扰,提高信号的质量,还需要经过滤波电路进行滤波处理。本系统采用LM567锁相环电路作为接收电路的核心,当接收信号在LM567的锁定频率范围内时,LM567的输出端会从高电平跳变为低电平,此信号作为单片机的中断信号,从而准确测量超声波从发射到接收的时间差。
3.2 电源电路
电源电路为整个系统提供稳定的电力供应。本系统采用5V直流电源供电,为了保证系统的稳定性和可靠性,电源电路中加入了滤波电容和稳压芯片。滤波电容用于滤除电源中的噪声和干扰,稳压芯片用于将输入的电压稳定在5V,为系统中的各个模块提供稳定的工作电压。
3.3 按键电路
按键电路用于实现用户与系统之间的交互。本系统中设置了多个按键,用于实现不同的功能,如设置报警距离、启动和停止测距等。按键电路采用独立式按键设计,每个按键连接到一个单片机的I/O口,通过检测I/O口的电平变化来判断按键是否被按下。
3.4 显示电路
显示电路用于实时显示测距结果和相关信息。本系统采用LCD1602液晶显示器,它是一种广泛应用于电子设备的字符型液晶显示模块,由16个字符和2行显示区域组成,可显示数字、字母和符号。LCD1602通过电极对液晶材料施加电场,控制液晶分子的排列,实现显示内容的改变。其内部主要由字符发生器ROM、显示RAM、控制器和液晶显示屏等部分组成。单片机通过与LCD1602的接口电路进行通信,将测距结果和其他信息发送给LCD1602进行显示。
3.5 DS18B20温度检测电路
DS18B20温度检测电路用于实时检测环境温度,为温度补偿算法提供数据支持。DS18B20是一种数字温度传感器,具有测量精度高、抗干扰能力强、使用方便等优点。它可以直接将温度转换为数字信号输出,无需外部模数转换电路。DS18B20通过单总线与单片机进行通信,单片机可以通过发送特定的指令来读取温度传感器的数据。在本系统中,DS18B20的温度检测范围为−55℃到+125℃,测量精度可达0.0625℃。
3.6 蜂鸣器报警电路
蜂鸣器报警电路用于在检测到障碍物距离小于设定报警距离时发出警报声,提醒驾驶员注意。蜂鸣器报警电路主要由蜂鸣器、驱动电路等组成。单片机通过控制驱动电路来驱动蜂鸣器发声。当测距结果小于设定报警距离时,单片机向驱动电路发送控制信号,使蜂鸣器发出警报声。
4. 系统软件设计
4.1 主程序流程
主程序是系统的核心控制程序,负责协调各个模块的工作。其流程如下:首先进行系统初始化,包括单片机的初始化、各模块的初始化等;然后启动温度检测,读取环境温度并进行温度补偿计算;接着启动超声波测距,记录超声波从发射到接收的往返时间,并计算出实际距离;将测距结果显示在LCD1602上;判断测距结果是否小于设定报警距离,如果小于则启动蜂鸣器报警;最后循环执行上述步骤,实现实时测距和报警功能。
4.2 超声波测距子程序
超声波测距子程序负责控制超声波的发射和接收,并计算实际距离。具体流程如下:单片机向超声波发射模块发送触发信号,启动超声波的发射;同时启动定时计数器开始计时;等待超声波接收模块接收到反射波并产生中断信号;当接收到中断信号后,停止定时计数器的计时;读取定时计数器的计数值,结合温度补偿后的超声波传播速度,计算出实际距离。
4.3 温度检测子程序
温度检测子程序负责读取DS18B20温度传感器的数据,并进行温度补偿计算。具体流程如下:单片机向DS18B20发送复位信号,启动温度测量;等待DS18B20完成温度测量并将数据存储在内部寄存器中;单片机向DS18B20发送读取温度指令,读取温度数据;根据读取的温度数据,利用温度补偿公式对超声波的传播速度进行修正。
4.4 显示子程序
显示子程序负责将测距结果和其他信息显示在LCD1602上。具体流程如下:单片机向LCD1602发送初始化指令,对LCD1602进行初始化;根据需要显示的内容,将相应的字符数据发送给LCD1602;LCD1602接收到字符数据后,将其显示在相应的位置上。
4.5 按键处理子程序
按键处理子程序负责检测按键的状态,并根据按键的功能执行相应的操作。具体流程如下:单片机定期检测按键所连接的I/O口的电平变化;当检测到有按键被按下时,判断是哪个按键被按下;根据按键的功能,执行相应的操作,如设置报警距离、启动和停止测距等。
5. 系统测试与分析
5.1 测试环境与方法
为了验证系统的有效性和可靠性,我们搭建了实际的测试环境。测试环境选择在一个空旷的室内场地,避免外界干扰。在测试场地中设置不同距离的障碍物,模拟实际倒车过程中的情况。测试方法采用多次测量取平均值的方法,以提高测量结果的准确性。
5.2 测试结果与分析
我们对系统进行了多次测试,测试结果如下:在常温环境下,系统测量的距离与实际距离的误差较小,最大误差不超过2cm,满足实际应用的要求。在不同温度环境下进行测试,发现采用温度补偿算法后,系统的测距精度明显提高。例如,在温度为10℃时,未采用温度补偿算法时,测量误差可达5cm左右;而采用温度补偿算法后,测量误差降低到2cm以内。这表明温度补偿算法能够有效减少因环境温度变化而导致的测距误差,提高系统的测距精度。
同时,我们对系统的报警功能进行了测试。当障碍物距离小于设定报警距离时,蜂鸣器能够及时发出警报声,提醒驾驶员注意。测试结果表明,系统的报警功能正常可靠。
6. 结论与展望
6.1 结论
本文设计并实现了基于51单片机的超声波测距仪倒车雷达汽车防撞系统。该系统利用单片机控制定时计数器记录超声波往返时间实现测距,采用温度补偿算法提高了测距精度。硬件方面,系统由超声波发射接收电路、电源电路、按键电路、显示电路、DS18B20温度检测电路、蜂鸣器报警电路等组成,各模块协同工作,实现了实时测距和报警功能。软件方面,通过主程序、超声波测距子程序、温度检测子程序、显示子程序和按键处理子程序等的配合,完成了系统的各项功能。实际测试结果表明,该系统具有测距精度高、报警功能可靠等优点,能够有效提高汽车倒车的安全性。
6.2 展望
虽然本系统取得了一定的成果,但仍有一些可以改进和完善的方面。未来可以进一步优化系统的硬件设计,提高系统的稳定性和抗干扰能力。例如,采用更先进的超声波传感器和电路设计,减少外界干扰对测距结果的影响。在软件方面,可以增加更多的功能,如语音提示功能、自动刹车功能等,提高系统的实用性和安全性。此外,还可以将该系统与其他汽车安全系统进行集成,如倒车影像系统、防撞预警系统等,形成一个更加完善的汽车安全防护体系。
参考文献
[1][14][15][17] 相关超声波测距、温度补偿及硬件设计资料.
[2][8] 酒精测试仪相关原理资料(用于对比参考测距技术多样性).
[9] LCD1602液晶硬件设计详解.
[16] 一文说懂三大神技:激光、红外、超声波测距谁才是测距之王?

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 17
17 0
0- 0



 已为社区贡献279条内容
已为社区贡献279条内容

所有评论(0)