先楫HPM6E8Y PWMV2外设输出PWM
本文总结了PWMv2模块调试的关键要点:1)模块含28个影子寄存器,支持4个独立子模块,每个需单独配置时间基准;2)PWM输出由两个比较值控制,可精确定制波形;3)配置流程包括初始化引脚、绑定时钟源和比较器到影子寄存器等步骤。文中提供了详细的代码实现示例,并强调正确分配比较值和寄存器的重要性。最后指出,开发时应以数据手册为准,避免凭猜测编程。
主要记录一下调试时候的注意点:
1、PWMv2模块包含28个32位的影子寄存器,可以随意使用
2、PWMv2 支持4个PWM生成子模块,每个子模块包含一个32位计数器,计数器构成了输出信号的时间基 准。所以每一个子模块都应该配置自己的时间基准,我以为同一个PWM外设用同一个基准,所以踩坑半天!
3、看下图,每个子模块都有对应的比较值,不要乱分配 P0就是1、2;P1就是2、3。
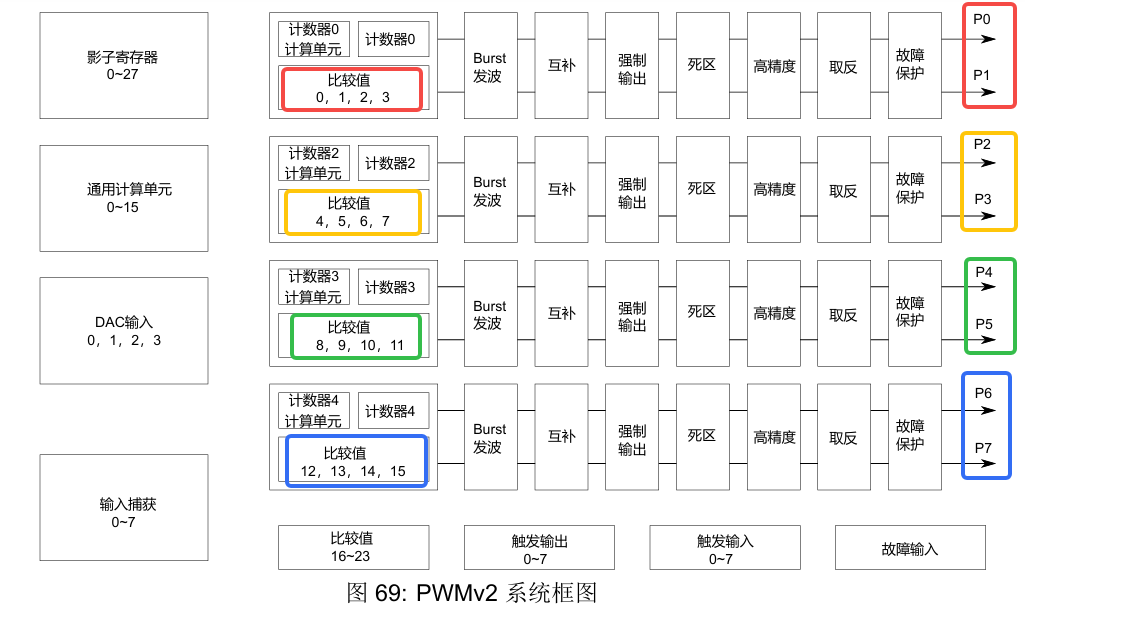
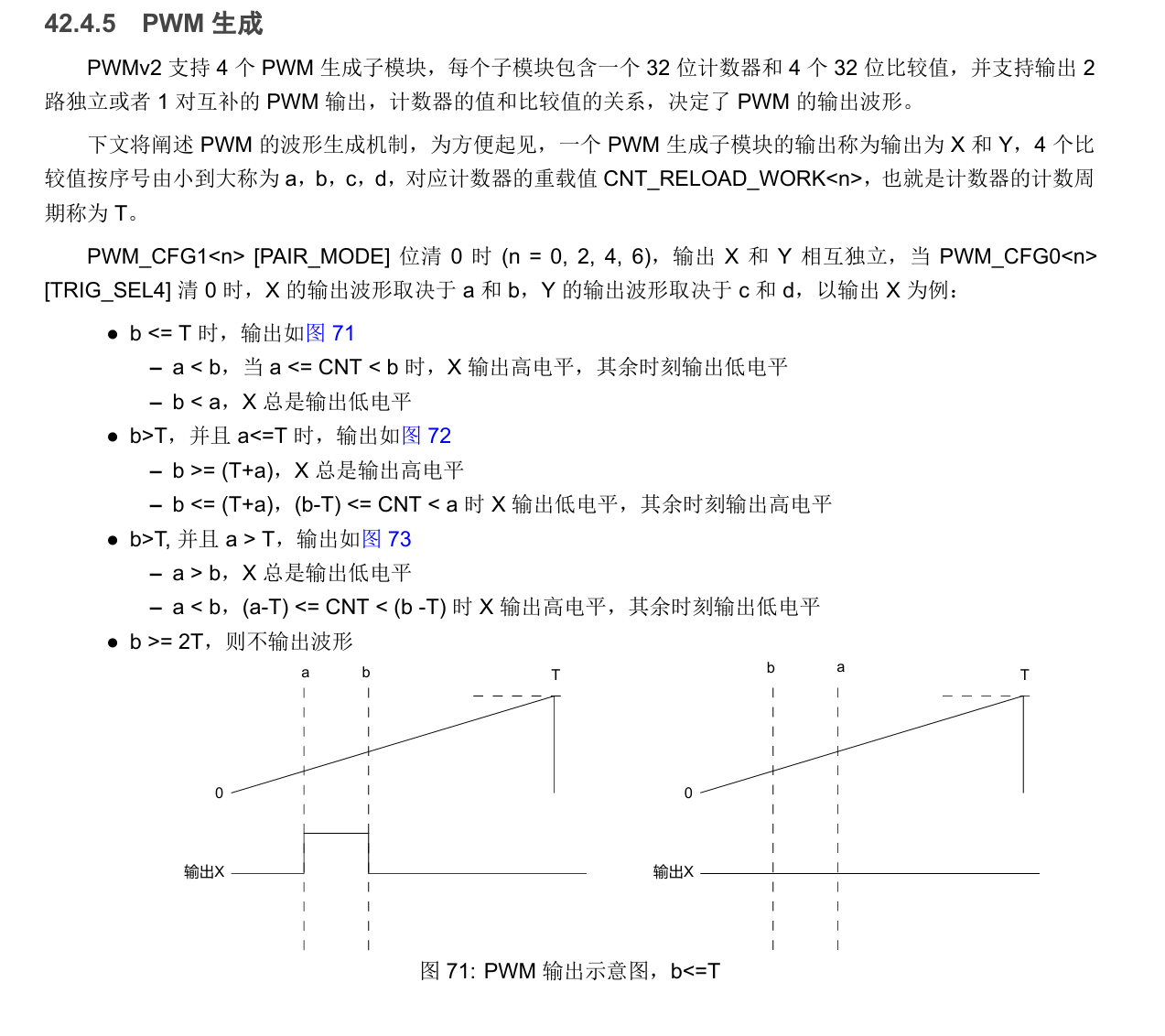
4、PWM生成的规则:靠两个比较值(也可以靠4个需要配置)控制一个PWM端口的输出,注意这两个值的大小有讲究,可以控制PWM在周期内的任意位置和大小,挺厉害。
5、配置流程:
1)、初始化引脚、设置影子寄存器(因为后面设置都是直接操作影子寄存器,不要直接操作比较值的寄存器),相当于给时间基准和比较值寄存器找了个替身。
2)、将时钟源绑定到影子寄存器、将比较器绑定到影子寄存器,不同的比较器可以使用同一个影子寄存器。
3)、其他的就是一些配置,关闭输出固定个数的PWM功能,设置每个PWM用两个寄存器配置....
void Pin_Init(void)
{
HPM_IOC->PAD[IOC_PAD_PD00].FUNC_CTL = IOC_PD00_FUNC_CTL_PWM0_P_0;
HPM_IOC->PAD[IOC_PAD_PD02].FUNC_CTL = IOC_PD02_FUNC_CTL_PWM0_P_2;
HPM_IOC->PAD[IOC_PAD_PD04].FUNC_CTL = IOC_PD04_FUNC_CTL_PWM0_P_4;
Pwm_Init();
}
#define FAN_PWM_PERIOD_IN_MS 10
#define FAN_PWM0_CH0 0
#define FAN_PWM0_CH2 2
#define FAN_PWM0_CH4 4
void Pwm_Init(void)
{
uint32_t freq,duty,reload = 0;
freq = clock_get_frequency(clock_pwm0);
reload = freq / 1000 * FAN_PWM_PERIOD_IN_MS - 1;
duty = reload / 100;
pwmv2_deinit(HPM_PWM0);
pwmv2_shadow_register_unlock(HPM_PWM0);
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(0), reload, 0, false);
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(1), 0, 0, false); // P0
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(2), reload >> 2, 0, false);
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(3), 0, 0, false); // P2
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(4), reload >> 2, 0, false);
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(5), 0, 0, false); // P4
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(6), reload >> 2, 0, false);
pwmv2_counter_select_data_offset_from_shadow_value(HPM_PWM0, pwm_counter_0, PWMV2_SHADOW_INDEX(0));
pwmv2_counter_select_data_offset_from_shadow_value(HPM_PWM0, pwm_counter_1, PWMV2_SHADOW_INDEX(0));
pwmv2_counter_select_data_offset_from_shadow_value(HPM_PWM0, pwm_counter_2, PWMV2_SHADOW_INDEX(0));
pwmv2_counter_burst_disable(HPM_PWM0, pwm_counter_0); // P0 P1
pwmv2_counter_burst_disable(HPM_PWM0, pwm_counter_1); // P2 P3
pwmv2_counter_burst_disable(HPM_PWM0, pwm_counter_2); // P4 P5
pwmv2_set_reload_update_time(HPM_PWM0, pwm_counter_0, pwm_reload_update_on_reload);
pwmv2_set_reload_update_time(HPM_PWM0, pwm_counter_1, pwm_reload_update_on_reload);
pwmv2_set_reload_update_time(HPM_PWM0, pwm_counter_2, pwm_reload_update_on_reload);
pwmv2_select_cmp_source(HPM_PWM0, PWMV2_CMP_INDEX(0), cmp_value_from_shadow_val, PWMV2_SHADOW_INDEX(1)); // P0
pwmv2_select_cmp_source(HPM_PWM0, PWMV2_CMP_INDEX(1), cmp_value_from_shadow_val, PWMV2_SHADOW_INDEX(2));
pwmv2_select_cmp_source(HPM_PWM0, PWMV2_CMP_INDEX(4), cmp_value_from_shadow_val, PWMV2_SHADOW_INDEX(3)); // P2
pwmv2_select_cmp_source(HPM_PWM0, PWMV2_CMP_INDEX(5), cmp_value_from_shadow_val, PWMV2_SHADOW_INDEX(4));
pwmv2_select_cmp_source(HPM_PWM0, PWMV2_CMP_INDEX(8), cmp_value_from_shadow_val, PWMV2_SHADOW_INDEX(5)); // P4
pwmv2_select_cmp_source(HPM_PWM0, PWMV2_CMP_INDEX(9), cmp_value_from_shadow_val, PWMV2_SHADOW_INDEX(6));
pwmv2_shadow_register_lock(HPM_PWM0);
// 选择两个比较点
pwmv2_disable_four_cmp(HPM_PWM0, FAN_PWM0_CH0);
pwmv2_channel_enable_output(HPM_PWM0, FAN_PWM0_CH0);
pwmv2_disable_four_cmp(HPM_PWM0, FAN_PWM0_CH2);
pwmv2_channel_enable_output(HPM_PWM0, FAN_PWM0_CH2);
pwmv2_disable_four_cmp(HPM_PWM0, FAN_PWM0_CH4);
pwmv2_channel_enable_output(HPM_PWM0, FAN_PWM0_CH4);
pwmv2_enable_counter(HPM_PWM0, pwm_counter_0);
pwmv2_enable_counter(HPM_PWM0, pwm_counter_1);
pwmv2_enable_counter(HPM_PWM0, pwm_counter_2);
pwmv2_start_pwm_output(HPM_PWM0, pwm_counter_0);
pwmv2_start_pwm_output(HPM_PWM0, pwm_counter_1);
pwmv2_start_pwm_output(HPM_PWM0, pwm_counter_2);
// 初始化输出占空比
pwmv2_shadow_register_unlock(HPM_PWM0);
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(2), duty * 38 , 0, false);
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(4), duty * 28 , 0, false);
pwmv2_set_shadow_val(HPM_PWM0, PWMV2_SHADOW_INDEX(6), duty * 15 , 0, false);
pwmv2_shadow_register_lock(HPM_PWM0);
}
最后补充一句:还是要回去看数据手册比较准,不要靠猜测写代码。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)