C2000基础-SCI介绍及使用
TMS320F28P550集成了三个高性能SCI串口模块(SCIA/B/C),支持全双工异步通信,最高波特率12.5Mbps,可配置数据位(5-9位)、停止位(1-2位)和校验位。开发示例展示了通过CCS和syscfg工具配置SCIA(GPIO28/29引脚)为115200波特率、8N1格式,并实现接收中断回显功能。关键API包括SCI_writeCharArray()、SCI_readCharB
第四章 SCI介绍及基础使用
1. F28P550的串口介绍
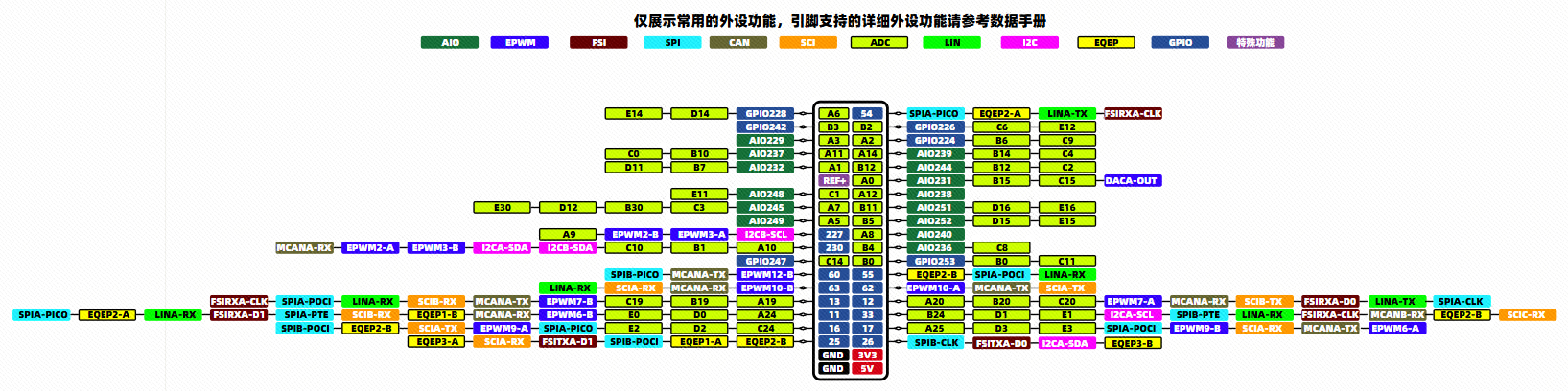
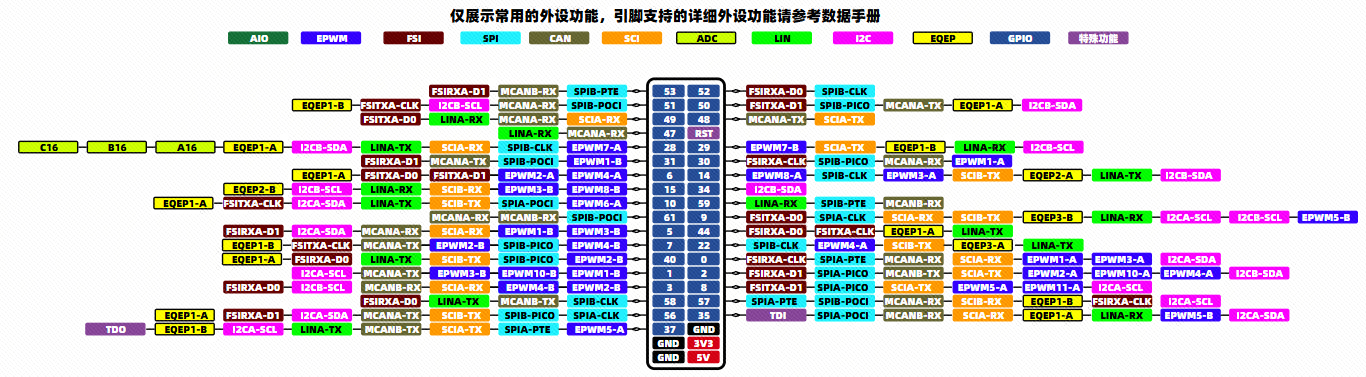
TMS320F28P550集成了三个高性能串行通信接口(SCI),分别是SCI-A、SCI-B、SCI-C,它们支持全双工异步通信,每个接口独立工作。在开发板上的支持串口的引脚见下方的开发板引脚示意图:(橙色的SCI)
串口通信参数
- 波特率范围:最高支持
12.5Mbps(具体取决于系统时钟分频配置)。
数据格式:
数据位:5 - 9 位可编程停止位:1 / 1.5 / 2 位可选校验位:无校验 / 奇校验 / 偶校验硬件流控制:支持RTS(请求发送)和CTS(清除发送)信号,防止数据溢出。
2. SCI使用示例
2.1 CCS&syscfg配置
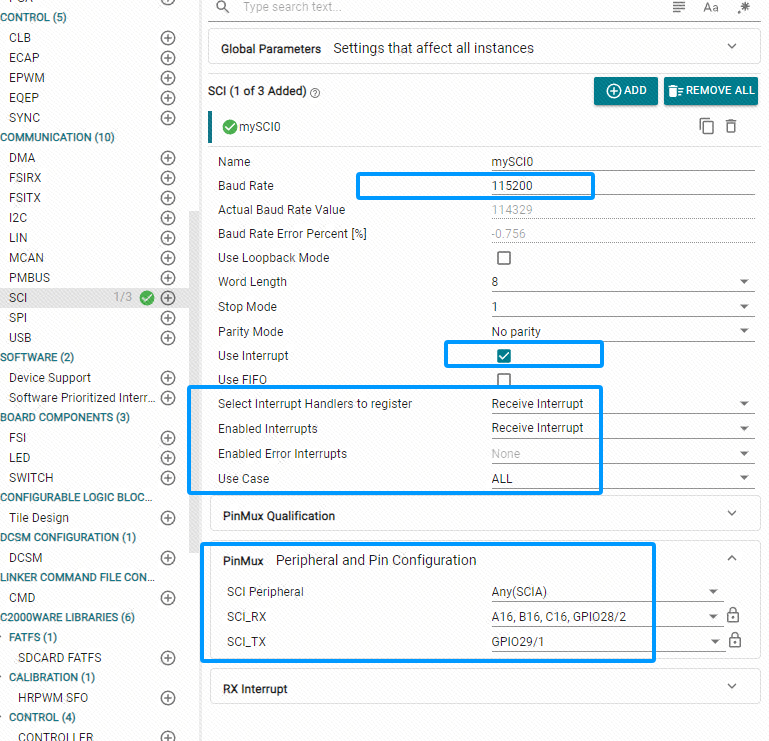
打开工程下的 .syscfg 文件。找到 SCI 选项开始配置:
-
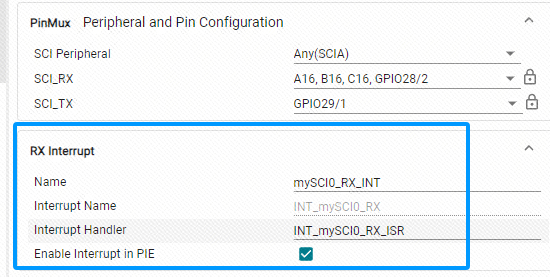
配置串口参数为波特率 115200、8 位数据长度、1 位停止位、无校验位。
-
开启串口发送与接收功能,并开启串口接收中断。
-
使用 SCIA-RX = GPIO28 和 SCIA-TX = GPIO29。
2.2 用户代码
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
#include "string.h" //使用 memset(), strlen() 需导入该文件
#define uart_rx_max 50 //定义最大接收长度
uint16_t rDataA[ uart_rx_max ]={0}; //定义串口接收数据的缓冲区
uint16_t rx_len = 0; //串口接收数据长度
uint16_t rx_flag = 0; //串口是否有接收到数据的标志位 =0没有 =1有
//任意毫秒的延时
void delay_ms(int x)
{
while(x--)
{
DEVICE_DELAY_US(1000);
}
}
void main(void)
{
Device_init();
Device_initGPIO();
Interrupt_initModule();
Interrupt_initVectorTable();
Board_init();
C2000Ware_libraries_init();
EINT;
ERTM;
while(1)
{
//如果串口接收标志位为1
if( rx_flag== 1 )
{
rx_flag=0;
GPIO_togglePin(User_LED);
//发送数据
SCI_writeCharArray(SCIA_BASE, rDataA, strlen(rDataA));
//清除数据
memset(rDataA, 0, sizeof(rDataA));
rx_len= 0;
}
delay_ms(1000);
}
}
__interrupt void INT_User_UART_RX_ISR(void)
{
//没有开启FIFO的情况下,等待接收区有数据了就返回数据
rDataA[rx_len] = SCI_readCharBlockingNonFIFO(SCIA_BASE);
//回环长度限制
rx_len = ( rx_len + 1 ) % uart_rx_max;
//设置接收标志位为1
rx_flag = 1;
SCI_clearInterruptStatus(SCIA_BASE, SCI_INT_RXFF);
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}
3. C2000 SCI (UART) 相关函数总结 (基于DriverLib)
注:本总结以TMS320F2837x/Dx系列为例。SCI是一个非常标准的外设,其概念在所有C2000型号中通用。主要区别在于不同芯片的SCI模块数量和支持的高级功能(如FIFO深度、LIN支持)可能略有差异。
3.1 SCI概述与核心概念
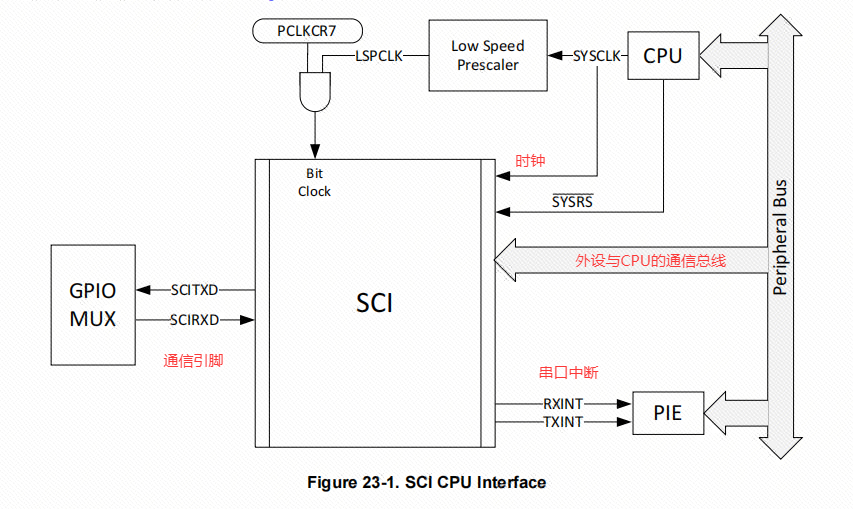
SCI模块提供了标准的UART功能,支持全双工、异步通信,通常由波特率发生器、发送器、接收器和控制逻辑组成。
-
核心通信流程:
数据寄存器 (SCITXBUF) -> 发送移位寄存器 -> TX引脚
RX引脚 -> 接收移位寄存器 -> 数据寄存器 (SCIRXBUF) -
主要组件说明:
组件 功能 C2000特点 波特率发生器 产生发送和接收所需的波特率时钟。 基于低速外设时钟LSPCLK,通过16位分频器生成。 数据帧格式 定义串行数据的组成。 可配置:数据位(8位)、停止位(1-2位)、校验位(无、奇、偶)。 FIFOs 先入先出缓冲区。 大多数C2000的SCI模块包含深度的TX和RX FIFO,可减少中断开销,提高通信效率。 中断源 标志通信事件(发送空、接收满、错误等)。 通过PIE管理,可灵活使能/禁止不同中断源。
3.2 SCI初始化与配置
-
核心配置流程(五步关键操作):
-
使能SCI外设时钟(配置LSPCLK,通常已在时钟初始化中完成)
-
配置GPIO复用为SCI功能(将特定引脚设置为SCIRXD/SCITXD)
-
初始化SCI模块参数(波特率、数据格式等)
-
(可选)配置FIFO(设置触发深度、使能)
-
(可选)配置中断(使能所需的中断源并注册ISR)
-
-
基础配置示例(配置SCI-A,115200, 8-N-1,轮询模式):
#include "driverlib.h" // 假设LSPCLK = 50MHz (SYSCLK=200MHz / LSPCLKDIV=4) #define LSPCLK_FREQ_HZ 50000000 #define SCI_BAUDRATE 115200 void main(void) { // 1. 初始化器件、GPIO、PIE Device_init(); Device_initGPIO(); // ... 确保LSPCLK已正确分频 ... // 2. 配置GPIO引脚为SCI功能 (以SCIA为例,GPIO28-RX, GPIO29-TX) GPIO_setPinConfig(GPIO_28_SCIRXDA); // GPIO28 复用为 SCIA的RX GPIO_setPinConfig(GPIO_29_SCITXDA); // GPIO29 复用为 SCIA的TX // GPIO方向会自动设置,但也可以显式配置 GPIO_setDirectionMode(28, GPIO_DIR_MODE_IN); GPIO_setDirectionMode(29, GPIO_DIR_MODE_OUT); // 3. 初始化SCI模块参数 SCI_setConfig(SCIA_BASE, LSPCLK_FREQ_HZ, SCI_BAUDRATE, (SCI_CONFIG_WLEN_8 | SCI_CONFIG_STOP_ONE | SCI_CONFIG_PAR_NONE)); SCI_resetModule(SCIA_BASE); // 复位模块,确保配置生效 SCI_enableModule(SCIA_BASE); // 使能SCI模块 // 4. 使能FIFO(推荐)并设置触发级别 SCI_enableFIFO(SCIA_BASE); // 使能FIFO功能 SCI_resetTxFIFO(SCIA_BASE); SCI_resetRxFIFO(SCIA_BASE); SCI_setFIFOInterruptLevel(SCIA_BASE, SCI_FIFO_TX0, SCI_FIFO_RX4); // TX空,RX有4字节产生中断 // 5. (轮询示例)发送一个字符串 const char message[] = "Hello, C2000 SCI!\r\n"; uint16_t i; for (i = 0; i < sizeof(message) - 1; i++) { SCI_writeCharBlockingFIFO(SCIA_BASE, message[i]); // 阻塞式发送字符 } while(1) { // 6. (轮询示例)检查并接收数据 if (SCI_getRxStatus(SCIA_BASE) & SCI_RXSTATUS_READY) { uint16_t receivedChar = SCI_readCharNonBlocking(SCIA_BASE); // 处理 receivedChar SCI_writeCharBlockingFIFO(SCIA_BASE, receivedChar); // 回显 } } } -
关键配置函数详解:
函数 (DriverLib) 说明 参数示例与解释 SCI_setConfig(uint32_t base, uint32_t lspclkHz, uint32_t baudrate, uint32_t config)SCI核心配置函数。一次性设置波特率和数据格式。 base:SCIA_BASE,SCIB_BASE等lspclkHz: LSPCLK频率 (Hz)baudrate: 目标波特率 (bps)config: 数据格式位掩码 (见下表)SCI_enableModule(uint32_t base)/disableModule使能/禁用SCI模块。 base: SCI模块基地址SCI_resetModule(uint32_t base)复位SCI模块。通常在配置前或错误恢复后调用。 base: SCI模块基地址SCI_enableFIFO(uint32_t base)/disableFIFO使能/禁用FIFO功能。强烈推荐使能。 base: SCI模块基地址SCI_resetTxFIFO(uint32_t base)/resetRxFIFO复位TX/RX FIFO指针。使能FIFO后应调用。 base: SCI模块基地址SCI_setFIFOInterruptLevel(uint32_t base, SCI_FIFOLevel txLevel, SCI_FIFOLevel rxLevel)设置FIFO中断触发深度。 txLevel:SCI_FIFO_TX0(TX空),SCI_FIFO_TX1…rxLevel:SCI_FIFO_RX0~SCI_FIFO_RX15(RX达到n字节) -
数据格式配置宏 (
config参数):配置项 宏 说明 数据位长度 SCI_CONFIG_WLEN_88位数据 SCI_CONFIG_WLEN_77位数据 (不常用) 停止位 SCI_CONFIG_STOP_ONE1个停止位 SCI_CONFIG_STOP_TWO2个停止位 校验位 SCI_CONFIG_PAR_NONE无校验 SCI_CONFIG_PAR_EVEN偶校验 SCI_CONFIG_PAR_ODD奇校验 组合示例 (SCI_CONFIG_WLEN_8 \| SCI_CONFIG_STOP_ONE \| SCI_CONFIG_PAR_NONE)经典的8-N-1格式
3.3 SCI数据收发函数
-
阻塞式函数 (Polling):适合简单应用或调试,会等待直到操作完成。
函数 原型 说明 SCI_writeCharBlockingFIFO(base, charData)阻塞式发送一个字符。等待TX FIFO有空位后写入。 SCI_readCharBlockingFIFO(base)阻塞式接收一个字符。等待RX FIFO有数据后读取。 SCI_writeCharArrayBlockingFIFO(base, array, length)阻塞式发送一个字节数组。 SCI_readCharArrayBlockingFIFO(base, array, length)阻塞式接收指定长度的字节数组。 -
非阻塞式函数 (Interrupt/DMA):适合高效应用,立即返回状态。
函数 原型 说明 SCI_writeCharNonBlockingFIFO(base, charData)非阻塞式发送。仅当TX FIFO有空间时写入,否则返回错误。 SCI_readCharNonBlocking(base)非阻塞式接收。仅当RX FIFO有数据时读取,否则返回错误。 SCI_getRxStatus(base)获取接收状态。检查是否有数据可用 ( SCI_RXSTATUS_READY)。SCI_getTxStatus(base)获取发送状态。检查TX FIFO是否为空 ( SCI_TXSTATUS_EMPTY)。 -
操作示例:
// 1. 发送字符串 (阻塞式) SCI_writeCharArrayBlockingFIFO(SCIA_BASE, (uint16_t*)"Hello\r\n", 6); // 2. 接收并回显 (非阻塞式查询) int16_t rxData; rxData = SCI_readCharNonBlocking(SCIA_BASE); if (rxData != -1) { // -1 表示没有数据 SCI_writeCharNonBlockingFIFO(SCIA_BASE, rxData); // 回显 } // 3. 检查发送是否完成(非阻塞式) if (SCI_getTxStatus(SCIA_BASE) & SCI_TXSTATUS_EMPTY) { // TX FIFO 和 发送移位寄存器 都已空,可以安全进入低功耗模式 }
3.4 SCI中断模式
使用中断可以极大地提高CPU效率,避免轮询等待。
-
中断配置示例(使用RX中断接收数据):
-
常用中断源宏:
中断源 宏 说明 RX FIFO SCI_INT_RXFFRX FIFO达到设定的触发级别 TX FIFO SCI_INT_TXFFTX FIFO为空(或低于触发级别) 接收错误 SCI_INT_RXERR帧错误、溢出错误、校验错误等
4. 关键注意事项
-
波特率计算:确保
LSPCLK_FREQ_HZ参数正确。错误的LSPCLK频率是导致波特率不准的最常见原因。公式:BRR = LSPCLK / (BAUD * 8) - 1,DriverLib的SCI_setConfig内部会自动计算。 -
GPIO复用:必须正确配置GPIO的复用功能,将引脚映射到SCI,而不是普通的GPIO或其他外设。这是无法通信的首要排查点。
-
FIFO的使用:强烈建议始终使能FIFO。即使使用轮询,FIFO也能缓冲数据,提高通信可靠性并减少错误。
-
中断处理:在ISR中,读取接收数据或检查发送状态会自动清除SCI模块内部的中断标志。但你必须使用
Interrupt_clear()来清除PIE组的中断标志。 -
电平转换:C2000的SCI引脚是TTL电平(3.3V),如果需要连接RS232设备(如老式PC串口),必须使用电平转换芯片(如MAX3232);如果需要连接RS485设备,则需使用RS485收发器。
-
软件流控:C2000的SCI硬件不支持CTS/RTS硬件流控,如果需要,必须在软件中实现XON/XOFF协议。
文中完整参考代码:https://github.com/hazy1k/C2000-Quick-Start-Guide-CCS/tree/main/TMS320F28P550/2.code

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 33
33 0
0- 0



 已为社区贡献63条内容
已为社区贡献63条内容

所有评论(0)