C2000基础-EPWM介绍及使用
摘要:本文介绍了F28P550微控制器的增强型PWM(ePWM)模块及其应用。ePWM包含12个模块,每个模块具有A、B两个通道,支持两种工作模式:基于时基和比较器的PWM模式。文章详细说明了配置步骤,包括时钟分频、计数模式选择和占空比设置,并提供了呼吸灯实现的代码示例。通过周期性和比较值的设置,可以精确控制PWM输出频率和占空比,实现LED亮度渐变效果。
第六章 EPWM介绍及基础使用
1. F28P550上的PWM
F28P550上的PWM叫ePWM,是一种增强型脉宽调制器, 一共有12个,每一个有两个通道,A通道和B通道。
ePWM具有两种工作模式,分别是基于时基Time Base的PWM模式,和比较器Compare的PWM模式。这两种工作模式都具有向上计数模式,向下计数模式,向上向下计数模式。
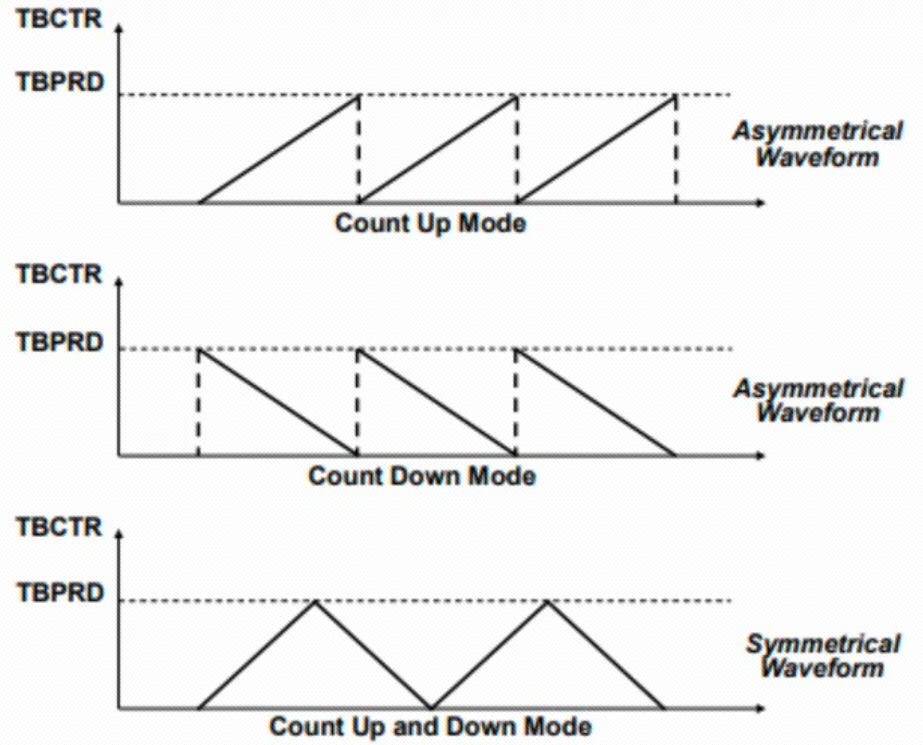
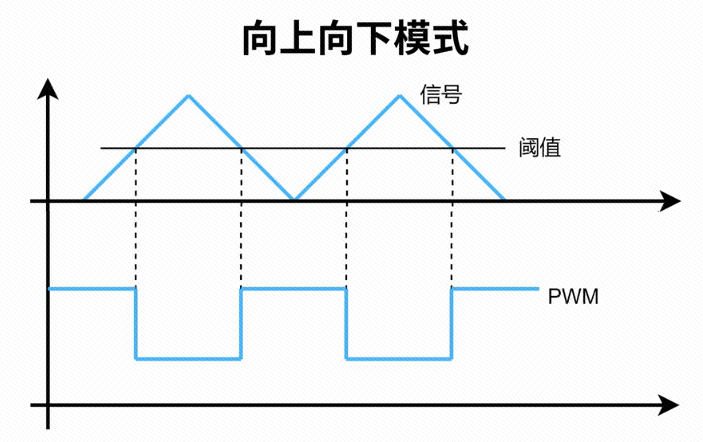
以向上向下计数模式为例,计数值一直向上加到最大,再从最大一直减到最小。计数变化的期间,如果计数值等于了设置的阈值(比较值),则输出的信号进行翻转。
这样向上计数的时候必定会遇到一次阈值,信号进行翻转;向下计数的时候也必定会遇到一次阈值,信号又进行一次翻转;最终实现的效果如下:
2. EPWM使用示例
2.1 CCS&syscfg配置
-
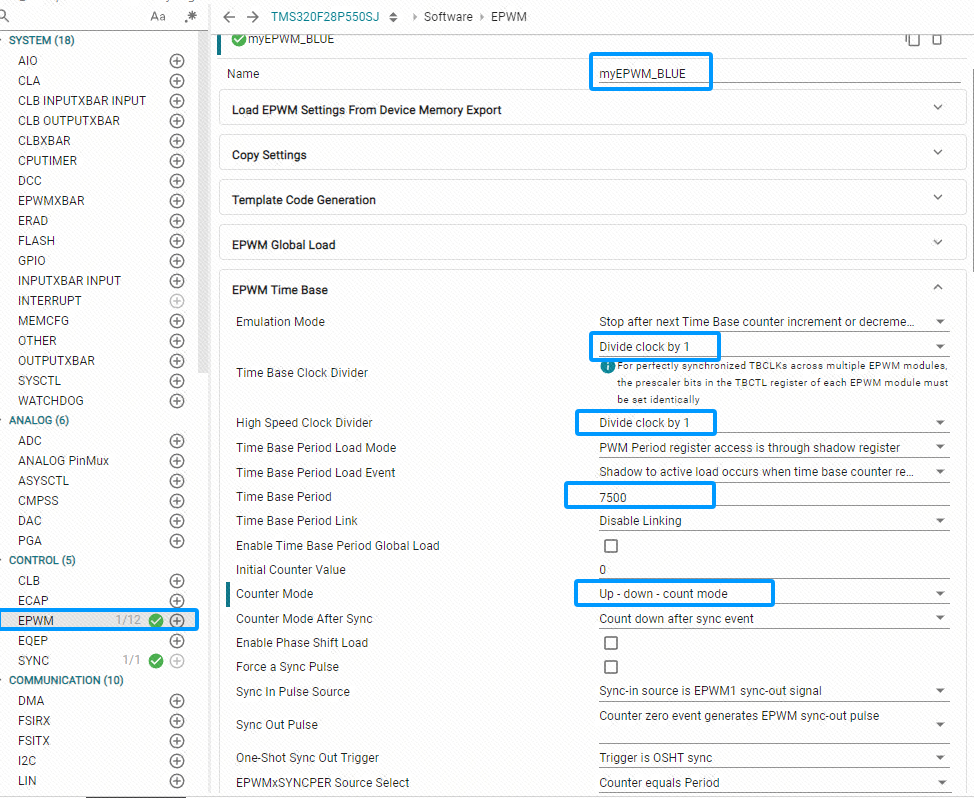
在 EPWM Time Base 中,设置时钟为默认的 1 分频,定时器周期 7500,使用向上向下计数模式;
-
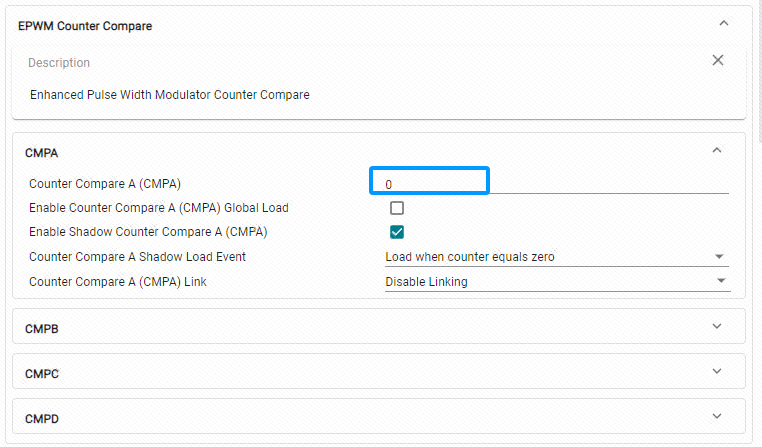
在 EPWM Counter Compare 中,在 CMPA 的下拉选项下,设置比较值(阈值)Counter Compare A (CMPA) 为0,即占空比为0%;
-
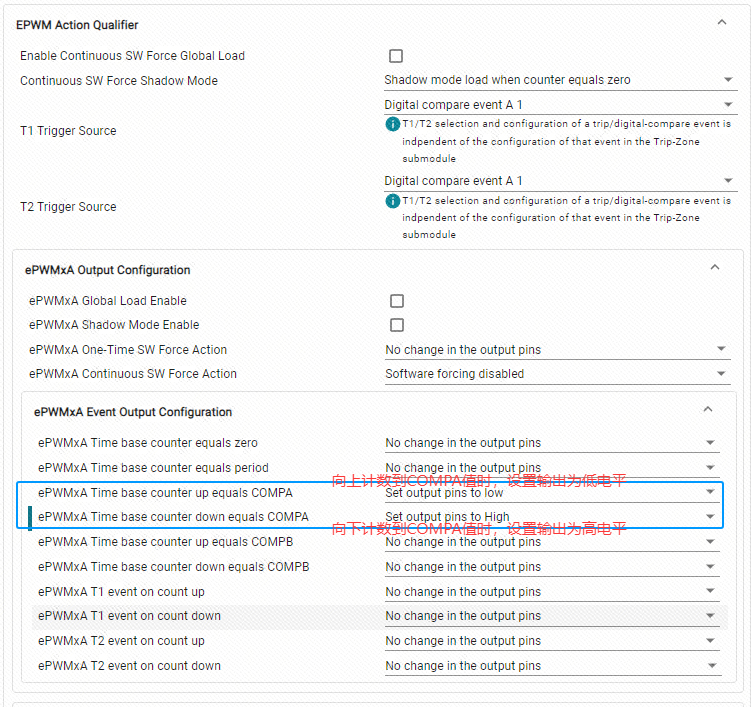
在 EPWM Action Qualifier 中,在 ePWMxA Event Output Configuration 的下拉选项下,设置向上计数到COMPA值时输出为高,向下计数到COMPA值时输出为高。
-
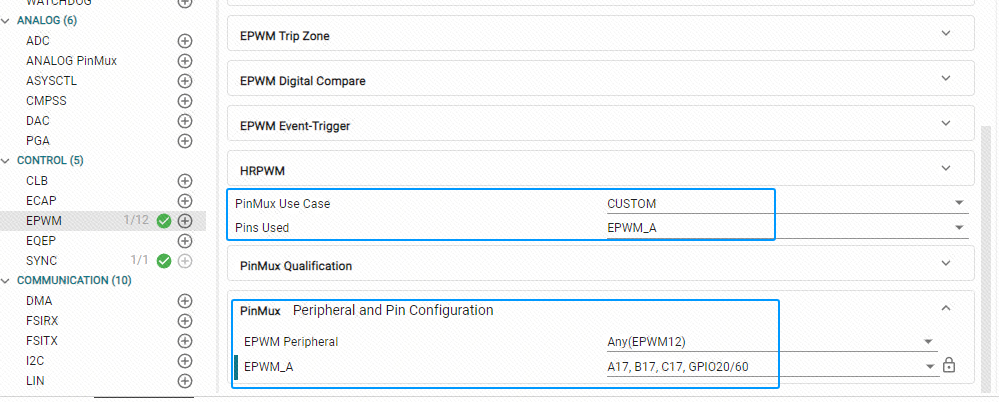
配置PWM到LED的引脚
关于输出频率和占空比的设置说明
ePWM时钟频率 EPWMCLK 来源为 SYSCLK,其默认为 150MHz。
CLKDIV 为 EPWM 定时器的时钟预分频;
HSPCLKDIV 为 EPWM 定时器的时钟二次预分频;
实际PWM的输出频率TBCLK = EPWMCLK / (HSPCLKDIV * CLKDIV)
定时器的周期值 = ePWM频率 / (2 * 希望输出频率)
希望输出频率 = ePWM频率 / (2 * 定时器的周期值)
COMPx 对比值 = (期望占空比 / 100) * 定时器的周期值
2.2 用户代码
//#############################################################################
//
// FILE: empty_driverlib_main.c
//
//! \addtogroup driver_example_list
//! <h1>Empty Project Example</h1>
//!
//! This example is an empty project setup for Driverlib development.
//!
//
//#############################################################################
//
//
//
// C2000Ware v5.05.00.00
//
// Copyright (C) 2024 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
/* PWM呼吸灯参数 */
#define STEP 10 // 占比比变化步长
uint16_t light_duty = 0; // PWM占空比
int8_t dir = 1; // 呼吸灯方向(1=正向, -1=反向)
void breathing_light(void)
{
light_duty += dir * STEP; // 改变PWM占空比
if(light_duty >= 7500)
{
light_duty = 7500;
dir = -1; // 呼吸灯方向反转
}
else if (light_duty <= 0)
{
light_duty = 0;
dir = 1; // 呼吸灯方向恢复
}
// 设置EPWM比较值
EPWM_setCounterCompareValue(User_EPWM_BASE, EPWM_COUNTER_COMPARE_A, light_duty);
}
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Disable pin locks and enable internal pull-ups.
//
Device_initGPIO();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// PinMux and Peripheral Initialization
//
Board_init();
//
// C2000Ware Library initialization
//
C2000Ware_libraries_init();
//
// Enable Global Interrupt (INTM) and real time interrupt (DBGM)
//
EINT;
ERTM;
while(1)
{
breathing_light(); // 呼吸灯变化
DEVICE_DELAY_US(1000);
}
}
//
// End of File
//
3. C2000 ePWM 模块相关函数总结 (基于DriverLib)
注:ePWM是一个高度模块化的外设。一个ePWM实例(如ePWM1)包含多个子模块:时基(TB)、计数比较(CC)、动作限定器(AQ)、死区生成(DB)、PWM斩波(PC)、事件触发(ET)、故障保护(TZ)。以下内容基于TMS320F2837x/Dx系列。
3.1 ePWM 模块概述与核心概念
ePWM模块的功能远不止生成简单的PWM波。它是一个完整的脉冲生成与管理生态系统。
-
核心信号流程:
时基(TB) -> 计数比较(CC) -> 动作限定器(AQ) -> 死区(DB) -> 最终输出EPWMxA/B
故障信号(TZ) ------------------------------------> 强制关断输出 -
子模块功能说明:
子模块 缩写 核心功能 时基 TB 产生核心计数器(TBCTR),定义PWM周期和相位。 计数比较 CC 提供比较寄存器(CMPA, CMPB),用于控制占空比。 动作限定器 AQ 根据TBCTR与TBPRD/CMPx的比较结果,产生原始的开关动作事件。 死区生成 DB 对AQ产生的原始信号插入可编程的死区时间,生成互补的PWM对,防止桥臂直通。 PWM斩波 PC 生成高频载波信号,用于驱动门极变压器(不常用)。 事件触发 ET 基于时间事件(如CTR=PRD, CTR=CMP)产生中断或启动ADC转换。 故障保护 TZ 响应外部故障引脚或内部错误,实现硬件级快速关断,保护功率电路。
3.2 关键子模块配置详解
3.2.1 计数比较子模块 (CC)
CC模块包含CMPA和CMPB寄存器,它们的值与TBCTR实时比较,是控制占空比的核心。
-
核心函数:
函数 说明 EPWM_setCounterCompareValue(base, compModule, value)设置CMPA或CMPB的值。 EPWM_setCounterCompareShadowLoadMode(...)**(重要)**设置影子寄存器加载模式,实现无毛刺更新。 -
配置示例:
// 设置CMPA的值,直接控制占空比 EPWM_setCounterCompareValue(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, 500); // 配置CMPA使用影子寄存器,在CTR=0时自动加载(安全更新) EPWM_setCounterCompareShadowLoadMode(EPWM1_BASE, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO); // 周期点加载 // 此时,写入CMPA的值会先存入影子寄存器,在下一个周期生效
3.2.2 动作限定器子模块 (AQ)
AQ是ePWM的逻辑核心。它根据特定事件(如CTR=CMPA, CTR=PRD)来设置、清除或翻转输出。
-
核心动作事件:
事件 宏 描述 递增时等于CMPA EPWM_AQ_OUTPUT_ON_TIMER_UP_CMPATBCTR递增且等于CMPA 递减时等于CMPA EPWM_AQ_OUTPUT_ON_TIMER_DOWN_CMPATBCTR递减且等于CMPA 等于周期值 EPWM_AQ_OUTPUT_ON_TIMER_PERIODTBCTR等于TBPRD 计数器为零 EPWM_AQ_OUTPUT_ON_TIMER_ZEROTBCTR等于0 -
核心函数:
函数 说明 EPWM_setActionQualifierAction(base, output, action, event)定义AQ动作。指定在某个事件发生时,对输出执行什么操作。 -
配置示例(生成不对称PWM):
// 配置EPWM1A输出: // - 当计数器等于CMPA且递增时,拉高输出。 // - 当计数器等于周期值时,拉低输出。 EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMER_UP_CMPA); EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMER_PERIOD); -
配置示例(生成对称PWM):
// 在Up-Down模式下,需要两个事件来控制一个输出 // - 递增时等于CMPA时拉高 // - 递减时等于CMPA时拉低 EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMER_UP_CMPA); EPWM_setActionQualifierAction(EPWM1_BASE, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMER_DOWN_CMPA);
3.2.3 死区生成子模块 (DB)
DB模块接收AQ产生的原始信号(A和B),并生成最终带死区的互补输出(A和B)。
-
核心函数:
函数 说明 EPWM_deadBandEnable(base)使能死区模块。 EPWM_setDeadBandDelayMode(base, delayMode, pwmsignals)设置死区延迟模式(上升沿延迟、下降沿延迟或两者)。 EPWM_setDeadBandDelayPolarity(base, pol, pwmsignals)设置输出极性(高有效/低有效)。 EPWM_setDeadBandDelay(base, riseDelay, fallDelay)设置上升沿和下降沿的死区时间(时钟周期数)。 -
配置示例(生成带死区的互补PWM):
// 1. 使能死区模块 EPWM_deadBandEnable(EPWM1_BASE); // 2. 配置死区:对上升沿和下降沿都插入延迟 EPWM_setDeadBandDelayMode(EPWM1_BASE, EPWM_DB_RED_FED, // Rise Edge Delay & Fall Edge Delay EPWM_DB_COUNTER_CLOCK_FULL_CYCLE); // 时钟分频(通常用全周期) // 3. 设置输出极性:OUTA高有效,OUTB低有效(互补) EPWM_setDeadBandDelayPolarity(EPWM1_BASE, EPWM_DB_POLARITY_ACTIVE_HIGH_CompL, // A高有效,B低有效互补 EPWM_DB_COUNTER_CLOCK_FULL_CYCLE); // 4. 设置死区时间(假设TBCLK=100MHz,欲设置1us死区时间) // 死区时间 = (值) * (TBCLK周期) uint16_t deadTimeValue = 100; // 100 * 10ns = 1us EPWM_setDeadBandDelay(EPWM1_BASE, deadTimeValue, deadTimeValue);
3.2.4 故障保护子模块 (TZ)
TZ是安全性的基石。它可以通过外部引脚或内部错误源,强制将ePWM输出驱动到安全状态(高、低或高阻)。
-
核心函数:
函数 说明 EPWM_enableTZModule(base, subModule, enable)使能特定故障源(如TZ1引脚)。 EPWM_setTripZoneAction(base, output, action)设置发生故障时输出的动作。 EPWM_setTripZoneDigitalCompareEventAction(...)设置数字比较(DC)事件触发的动作(高级功能)。 EPWM_forceTripZoneEvent(base, tzFlags)软件强制触发故障事件,用于测试。 -
配置示例(过流保护):
// 1. 使能TZ1引脚作为故障源(通常连接电流采样比较器输出) EPWM_enableTZModule(EPWM1_BASE, EPWM_TZ_MODULE_TZ1, true); // 使能TZ1 // 2. 配置TZ1触发时,将EPWM1A和EPWM1B都强制拉高(封锁驱动,桥臂断开) // 根据你的硬件设计,也可能是拉低。 EPWM_setTripZoneAction(EPWM1_BASE, EPWM_TZ_ACTION_EVENT_TZA, // 对EPWM1A的操作 EPWM_TZ_ACTION_HIGH); // 故障时强制输出高 EPWM_setTripZoneAction(EPWM1_BASE, EPWM_TZ_ACTION_EVENT_TZB, // 对EPWM1B的操作 EPWM_TZ_ACTION_HIGH); // 故障时强制输出高 // 3. (可选)配置为单次故障锁定(CBC-Latch模式) // 故障发生后,输出将一直保持安全状态,直到软件清除标志 EPWM_setTripZoneLatchMode(EPWM1_BASE, EPWM_TZ_ACTION_LATCH_ON_TRIP); // 锁存 // 在中断中需要清除标志才能恢复输出 // EPWM_clearTripZoneLatchFlag(EPWM1_BASE, EPWM_TZ_FLAG_TZ1);
3.2.5 事件触发子模块 (ET)
ET模块允许在特定的时间点(如CTR=PRD, CTR=CMP)触发中断(INT)或启动ADC转换(SOC)。
-
核心函数:
函数 说明 EPWM_enableInterrupt(base)使能ePWM模块产生中断。 EPWM_setInterruptSource(base, event)设置中断源(如周期中断、比较中断)。 EPWM_setInterruptEventCount(base, count)设置每N次事件产生一次中断。 EPWM_enableADCTrigger(base, trig)使能ADC启动转换(SOC)触发。 EPWM_setADCTriggerSource(base, trig, event)设置ADC触发的源。 EPWM_setADCTriggerEventPrescale(base, trig, count)设置每N次事件产生一次ADC触发。 -
配置示例(周期中断和ADC触发):
// 1. 配置在每个PWM周期开始时(CTR=0)产生中断 EPWM_enableInterrupt(EPWM1_BASE); EPWM_setInterruptSource(EPWM1_BASE, EPWM_INT_TBCTR_ZERO); // 中断源:计数器为零 EPWM_setInterruptEventCount(EPWM1_BASE, 1); // 每个事件都中断 // 2. 配置在CTR=CMPA时启动ADC转换(用于采样相电流) EPWM_enableADCTrigger(EPWM1_BASE, EPWM_SOC_A); // 使能SOCA EPWM_setADCTriggerSource(EPWM1_BASE, EPWM_SOC_A, EPWM_SOC_TBCTR_U_CMPA); // 触发条件:递增且等于CMPA EPWM_setADCTriggerEventPrescale(EPWM1_BASE, EPWM_SOC_A, 1); // 每个事件都触发 // 3. 注册中断并使能PIE(略,见前面章节)
3.3 完整ePWM配置示例(全桥驱动)
void initEPWMForFullBridge(uint32_t base, float dutyCycle) {
uint16_t period = 999; // 对于UP模式,PWM频率 = HSPCLK / (period+1)
uint16_t cmpValue = (uint16_t)(period * dutyCycle);
// 1. 时基(TB)配置
EPWM_setTimeBasePeriod(base, period);
EPWM_setTimeBaseCounterMode(base, EPWM_COUNTER_MODE_UP);
EPWM_setClockPrescaler(base, EPWM_CLOCK_DIVIDER_1, EPWM_HSCLOCK_DIVIDER_1);
// 2. 计数比较(CC)配置 - 使用影子寄存器安全更新
EPWM_setCounterCompareShadowLoadMode(base, EPWM_COUNTER_COMPARE_A, EPWM_COMP_LOAD_ON_CNTR_ZERO);
EPWM_setCounterCompareValue(base, EPWM_COUNTER_COMPARE_A, cmpValue);
// 3. 动作限定器(AQ)配置 - 生成两路原始PWM
// EPWMA: CTR=CMPA时拉高,CTR=PRD时拉低
// EPWMB: CTR=CMPA时拉低,CTR=PRD时拉高 (与A互补)
EPWM_setActionQualifierAction(base, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMER_UP_CMPA);
EPWM_setActionQualifierAction(base, EPWM_AQ_OUTPUT_A, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMER_PERIOD);
EPWM_setActionQualifierAction(base, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_LOW, EPWM_AQ_OUTPUT_ON_TIMER_UP_CMPA);
EPWM_setActionQualifierAction(base, EPWM_AQ_OUTPUT_B, EPWM_AQ_OUTPUT_HIGH, EPWM_AQ_OUTPUT_ON_TIMER_PERIOD);
// 4. 死区(DB)配置 - 防止桥臂直通
EPWM_deadBandEnable(base);
EPWM_setDeadBandDelayMode(base, EPWM_DB_RED_FED, EPWM_DB_COUNTER_CLOCK_FULL_CYCLE);
uint16_t deadTime = 100; // 假设100个TBCLK周期
EPWM_setDeadBandDelay(base, deadTime, deadTime);
// 配置输出极性:A和B均为高有效,但DB模块会自动生成互补带死区的信号
EPWM_setDeadBandDelayPolarity(base, EPWM_DB_POLARITY_ACTIVE_HIGH, EPWM_DB_COUNTER_CLOCK_FULL_CYCLE);
// 5. 故障保护(TZ)配置
EPWM_enableTZModule(base, EPWM_TZ_MODULE_TZ1, true);
EPWM_setTripZoneAction(base, EPWM_TZ_ACTION_EVENT_TZA, EPWM_TZ_ACTION_HIGH); // 故障时封锁
EPWM_setTripZoneAction(base, EPWM_TZ_ACTION_EVENT_TZB, EPWM_TZ_ACTION_HIGH);
// 6. 事件触发(ET)配置 - 在周期点中断,用于运行控制算法
EPWM_enableInterrupt(base);
EPWM_setInterruptSource(base, EPWM_INT_TBCTR_ZERO);
EPWM_setInterruptEventCount(base, 1);
}
// 主函数中调用
initEPWMForFullBridge(EPWM1_BASE, 0.5); // 初始化ePWM1,50%占空比
4. 关键注意事项
-
影子寄存器:在任何实时控制应用中,更新CMPA、CMPB、TBPRD必须使用影子寄存器,以避免PWM波形出现毛刺,导致功率器件损坏。
-
时序对齐:ADC的SOC触发时刻必须与PWM波形保持精确同步(例如在PWM中点采样电流),以确保控制环路计算的准确性。
-
TZ响应速度:TZ故障是硬件自动响应,无需CPU干预,响应速度极快(纳秒级),是保护系统的最后一道防线。切勿用软件中断替代。
-
时钟一致性:确保计算PWM频率、死区时间、触发位置时,所使用的
HSPCLK和TBCLK频率值与实际系统配置完全一致。 -
仿真挂起:调试时,如果CPU在断点处挂起,ePWM硬件会继续运行。这可能导致功率电路失控。建议在调试实时控制系统时禁用PWM输出或使用低功率测试平台。
文中完整参考代码:https://github.com/hazy1k/C2000-Quick-Start-Guide-CCS/tree/main/TMS320F28P550/2.code

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 36
36 0
0- 0



 已为社区贡献63条内容
已为社区贡献63条内容

所有评论(0)