路径规划智能小车(论文+源码)
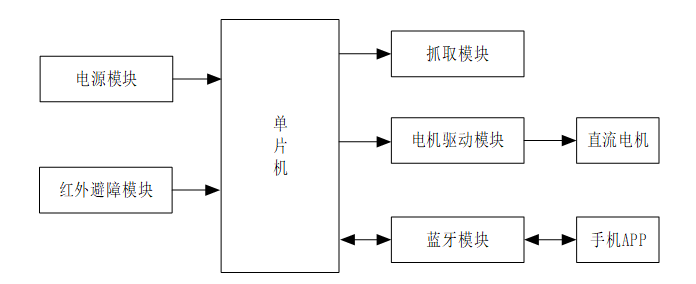
本设计基于STM32单片机开发智能小车系统,采用模块化结构,包含电源、红外避障、电机驱动和蓝牙通信等模块。系统通过STM32处理红外传感器数据,实现路径规划与自动避障,同时支持蓝牙远程控制。具备物品抓取功能,可适应复杂任务场景。系统框图见图2-1。
·
1.方案设计
本系统基于STM32单片机设计,构建了一套具备路径规划、避障与无线控制功能的智能小车系统。系统采用模块化结构设计,包括电源模块、红外避障模块、电机驱动模块、蓝牙通信模块等。STM32作为核心控制单元,接收来自红外避障模块的环境信息,结合控制逻辑生成运动指令,通过电机驱动模块控制直流电机实现小车运动。同时,系统通过蓝牙模块与手机APP建立通信,用户可远程发送指令实现小车的路径规划与状态控制。在前方遇到障碍时,系统不仅可自动进行避障处理,还支持通过遥控操作机械结构进行物品抓取,提升了小车在复杂任务场景下的实用性与交互性。系统框图如图2-1所示。
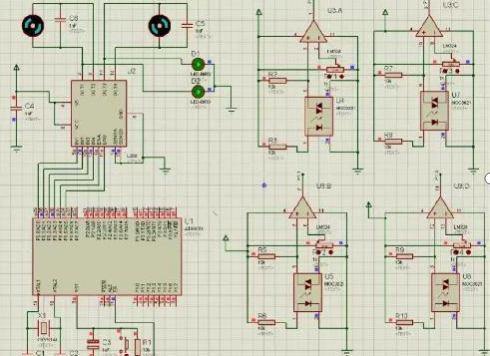
2.电路图

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 9
9 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)