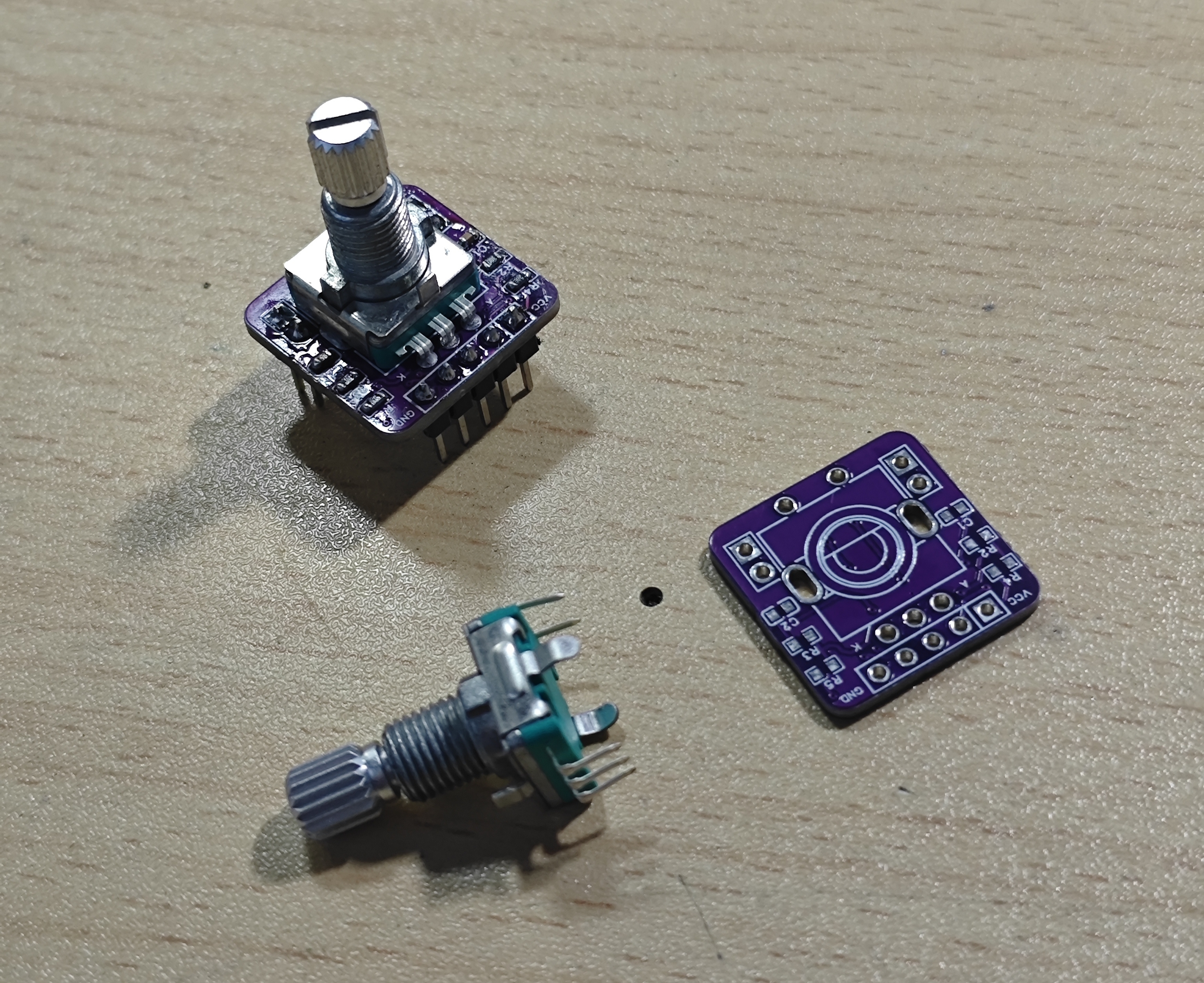
实际的旋转编码器时序
旋转编码器是通过AB相的相位差判断旋转方向的,但是旋转编码器毕竟是机械结构,会和按键一样产生抖动,如果不加以消抖,单片机的判断会错乱,难以稳定识别正反转以及旋转速度。
·
旋转编码器是通过AB相的相位差判断旋转方向的,但是旋转编码器毕竟是机械结构,会和按键一样产生抖动,如果不加以消抖,单片机的判断会错乱,难以稳定识别正反转以及旋转速度。
本次展示硬件消抖后旋转编码器的时序逻辑,以便配合软件消抖算法编写驱动程序。
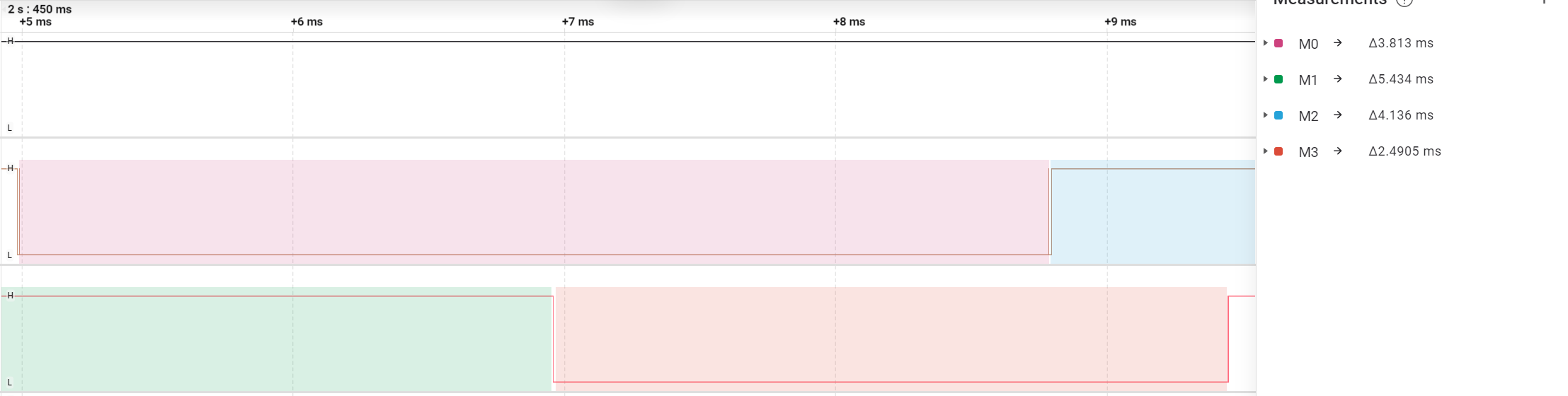
先看时序(上A下B),后看电路
1、顺时针超慢转动
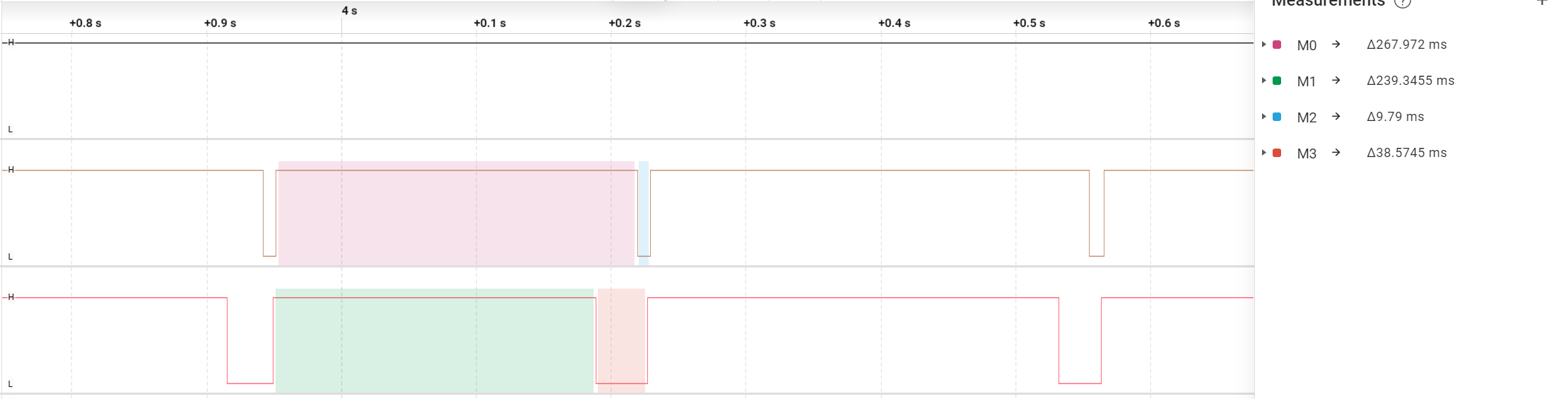
低电平和高电平保持的时间都是毫秒级的,并且没有抖动,对于单片机来说,识别起来非常容易。
2、顺时针超快转动
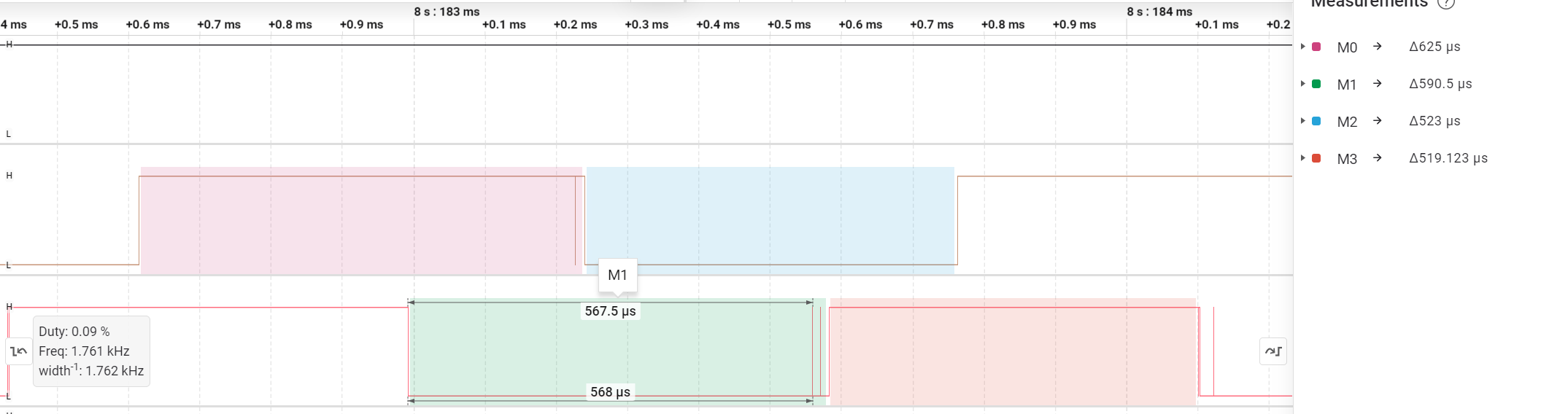
此时高低电平时长基本一样,时间大约是半毫秒,而且我觉得在实际使用中是不会旋转如此之快的。
要注意此时出现了抖动,务必软件消除这些抖动。
3、逆时针中速转动
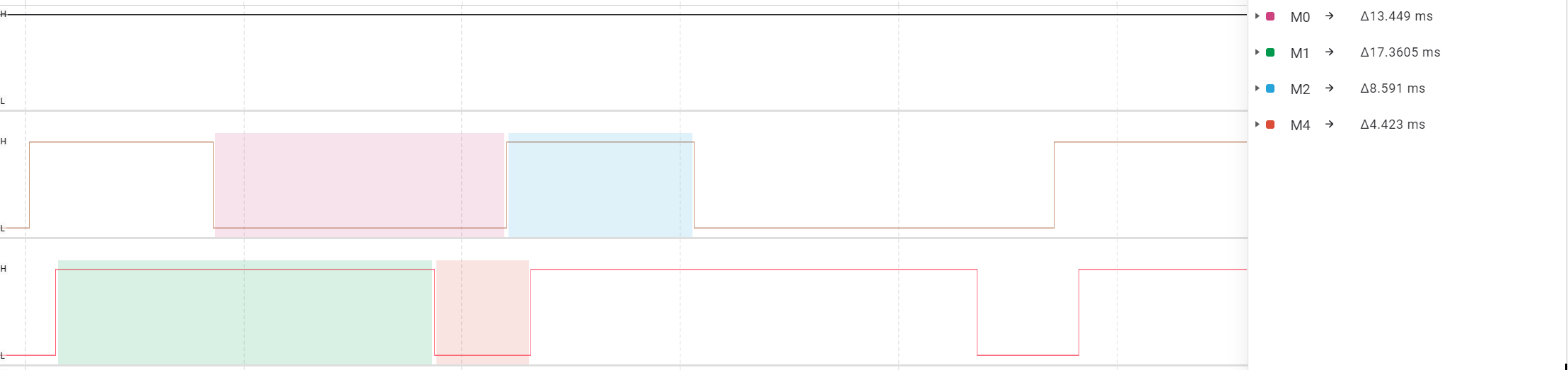
4、逆时针快速转动
根据这些旋转的时序图可以基本确定软件消抖的判定时间,下期将使用HAL库在stm32上编写旋转编码器驱动,尽请期待
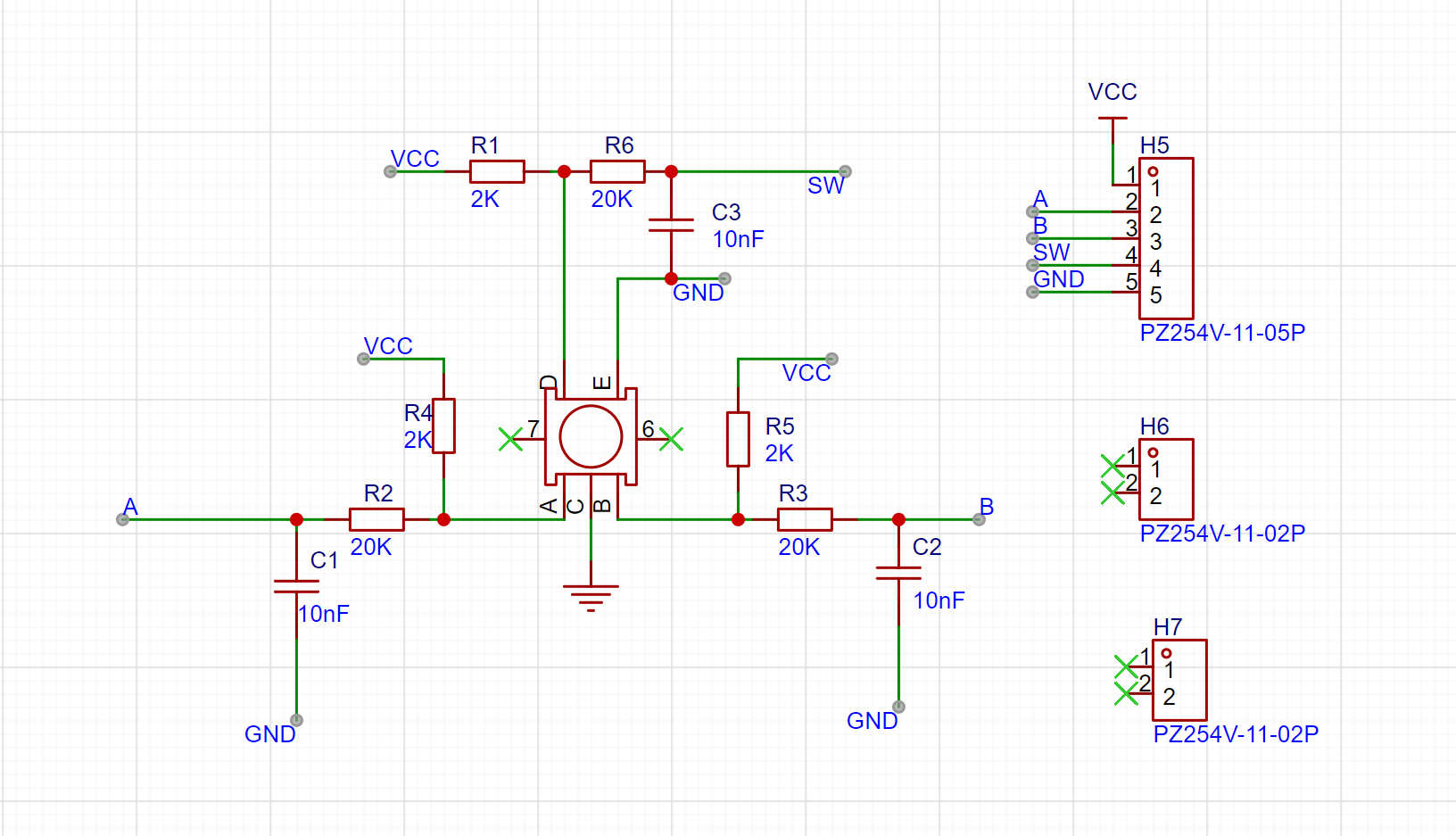
这是硬件电路,vcc输入3.3V

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 3
3 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)