挑战双核极限!STM32H755双核驱动 我的机械臂能分拣能开火!赋予机械臂“武力”与“感知”!
本文介绍了一个基于STM32H755双核处理器的智能机械臂控制系统。该系统充分利用CM7和CM4双核架构优势,实现了机械臂分拣、自动接水、炮台扫射等功能,同时集成了温湿度、气压等多传感器数据采集。硬件设计包含PWM舵机控制、I2C传感器通信、SPI显示屏交互等模块,并通过WiFi实现手机APP远程控制。系统采用三层架构设计,通过双核协同处理提高并行能力,为小型自动化场景提供了高效解决方案。项目展示
挑战双核极限!STM32H755双核驱动 我的机械臂能分拣能开火!赋予机械臂“武力”与“感知”!
挑战双核极限!STM32H755双核驱动 我的机械臂能分拣能开火!赋予机械臂“武力”与“感知”!|得捷大开箱
项目内容和介绍大家可以看视频哈,有兴趣的可以留言,感兴趣的朋友多的话会出几期代码讲解视频:主要内容有双核通信,机械臂控制,传感器数据采集等等
项目介绍
本次设计了一套以STM32H755ZIT6为核心控制器的智能集成系统,充分发挥其 * Cortex-M7(CM7)+ Cortex-M4(CM4)* 双核架构的并行处理优势,融合机械臂智能控制、多维度传感器数据采集、多协议通信及远程交互等功能,实现了机械臂分拣物品、自动接水、炮台扫射,温湿度 / 气压 / 光照等环境数据采集,过压欠压报警,以及手机 APP 远程监控与控制等应用,为小型自动化、物联网场景提供了高效解决方案。
随着工业自动化与物联网技术的深度发展,智能设备对 “多任务并行处理”“多传感器数据融合”“远程交互控制” 的需求愈发迫切。STM32H7 系列微控制器凭借高性能双核架构(CM7 主频可达 480MHz,支持浮点运算与 DSP 指令;CM4 可承担专用数据采集与通信任务),成为复杂嵌入式系统的理想核心器件。
本系统以 STM32H755ZIT6 为核心,整合 “机械臂精准控制”“多类型环境感知”“多总线通信” 与 “远程交互” 能力,旨在打造一套功能丰富、响应高效的智能集成平台,可服务于教育实验、小型自动化改造等场景。
系统总体设计
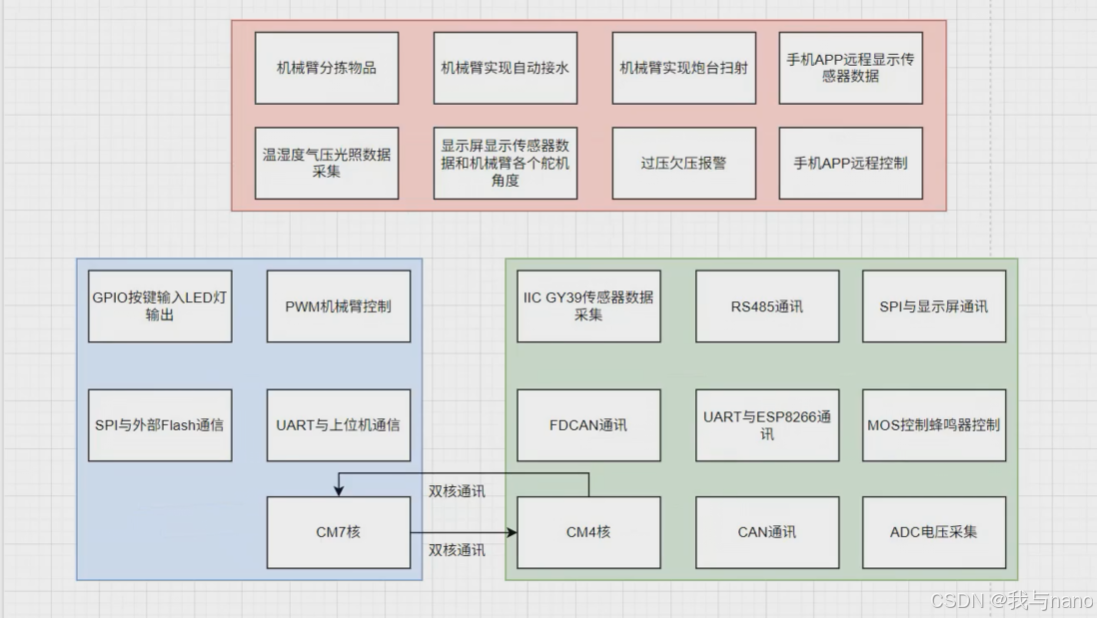
系统采用 “功能层 - 硬件驱动层 - 双核协同层” 三层架构,各层级分工明确:
功能层:聚焦用户需求,涵盖机械臂动作执行(分拣、接水、扫射)、多传感器数据采集(温湿度、气压、光照、电压)、人机交互与远程控制(显示屏、手机 APP、报警)三大核心方向。
硬件驱动层:依托 STM32H755ZIT6 的丰富外设(GPIO、PWM、IIC、SPI、UART、CAN、ADC 等),实现各功能模块的硬件驱动与数据传输。
双核协同层:通过共享内存 + 核间中断机制,让 CM7 与 CM4 分工协作 ——CM7 侧重机械臂高实时性控制与核心逻辑调度,CM4 负责多传感器数据采集、多协议通信等并行任务,大幅提升系统多任务并发能力。
硬件模块设计与实现
- 机械臂控制模块
机械臂采用 “多舵机关节组合” 结构,通过 STM32H755ZIT6 的PWM 输出功能实现舵机角度精准控制:
配置定时器生成频率、占空比可调的 PWM 波,不同占空比对应舵机不同旋转角度;针对 “分拣物品”“自动接水”“炮台扫射” 等场景,预设机械臂各关节的角度组合与运动时序,确保动作自动化、精准化。 - 多传感器数据采集模块
环境多参数采集(GY39 传感器):通过IIC 总线与 CM4 核通信,GY39 集成温湿度、气压、光照传感器,可实时采集环境多维度数据。通过编写 IIC 驱动程序,完成传感器初始化、数据读取与解析,为系统提供 “环境感知” 能力。
电压监测与报警(ADC 模块):利用 STM32H755ZIT6 的16 位高精度 ADC采集电源电压,预设 “过压 / 欠压阈值”;当电压超出阈值时,触发蜂鸣器报警与显示屏警示,保障系统供电安全。 - 通信与交互模块
SPI 通信:
与TFT 显示屏通信:将传感器采集的温湿度、气压、光照数据,以及机械臂各舵机角度实时显示,实现本地可视化监控;
与外部 Flash通信:将关键数据(如异常电压记录、机械臂动作日志)本地存储,支持后续数据回溯与分析。
UART 通信:
与上位机通信:用于系统调试、参数配置与数据导出;
与ESP8266 无线模块通信:构建 WiFi 传输通道,支持手机 APP 远程读取传感器数据与控制机械臂动作,实现 “远程交互”。
工业总线通信(RS485、CAN、FDCAN):提供多种工业级总线接口,满足不同场景的设备互联需求
本地交互与报警:
GPIO 接口控制LED 指示灯与按键,实现 “本地状态指示” 与 “手动操作触发”;在 “过压欠压”“系统异常” 时发出报警提示。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 18
18 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)