脉冲控制与电机运动:概念、执行流程及其对位移计算的影响【一文了解什么是脉冲、电机分辨率、减速比、导程】
本文介绍了运动控制中脉冲信号的工作原理及其在电机控制中的应用。脉冲信号通过快速切换输出状态来控制步进电机或伺服电机的运动,其数量决定位置,频率决定速度。文章详细解释了如何通过脉冲+方向模式实现正反转,对比了步进电机和伺服电机的差异,重点阐述了伺服电机的闭环控制特性。同时介绍了电机分辨率、减速比和导程三个关键参数:分辨率决定最小控制刻度,减速比提高输出精度但降低速度,导程影响旋转-直线运动的转换比例
阅前提醒:部分内容源自B站Up主【匹尔西:https://space.bilibili.com/381962124?spm_id_from=333.337.0.0】
概念解释
1. 脉冲(Pulse)

类似于脉搏,脉冲的输出信号, 相当于快速切换某一个输出点的输出状态,发送脉冲可以是做按下一个按钮,接收脉冲视作一个计数器,累计闪烁次数,
- 运动控制卡通过发送 Pulse 来控制步进电机 或 伺服电机(带编码器) 的运动
1.1. 脉冲如何表示位置和速度?
电机每旋转一周,对应多少行程。取决于机械设计的用减速机的减速比、丝杆的导程等参数
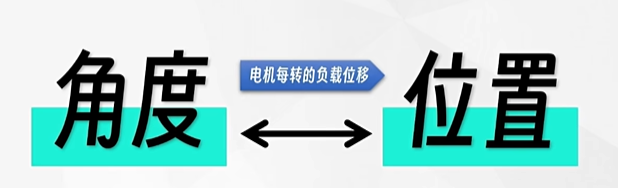
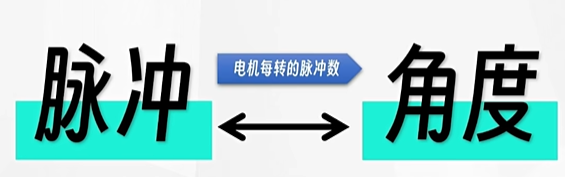
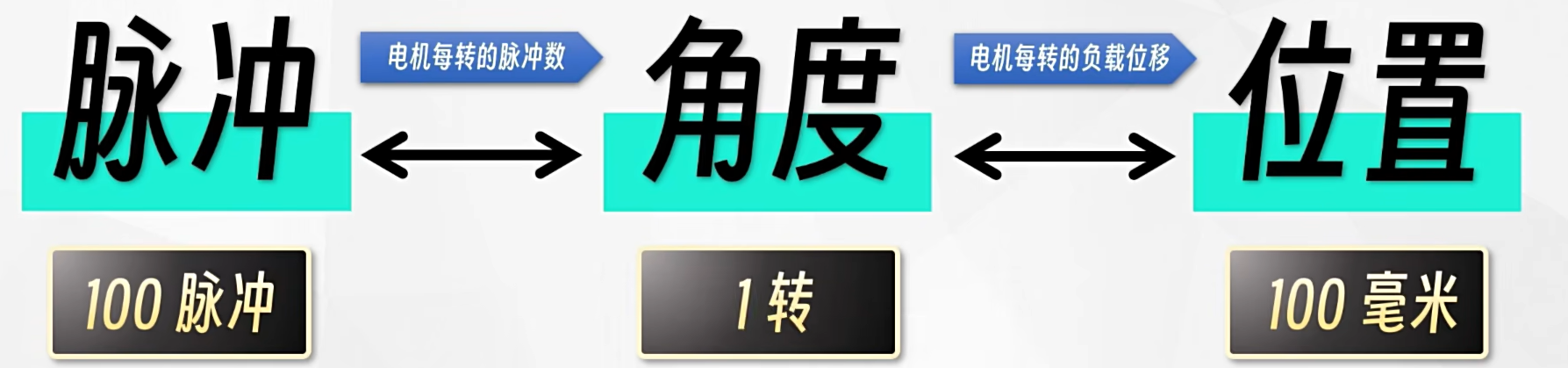
在控制卡和驱动器的设置里,需要设置每转脉冲数,通过每转行程和每转脉冲数,可以把机构的运行距离转换为脉冲的数量
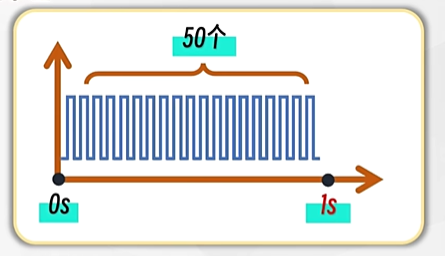
以图示为例,每转的行程是 100mm, 100 个 Pulse 为 1 转(rev)。
当以 5mm/s 的速度,触发相对定位 50 mm 的时候,控制卡会在 10s 左右的时间总计发送 50 个脉冲。此时伺服电机旋转半圈,机构前进 50mm
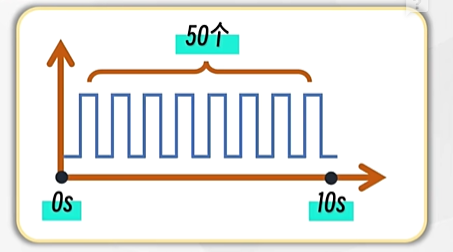
如果把速度改为 50mm/s ,再次触发 50 个脉冲,则会在 1s 内发完,伺服运行速度会变快。
控制卡通过发送脉冲的数量来实现对位置的控制,通过发送脉冲的频率来实现队速度的控制。
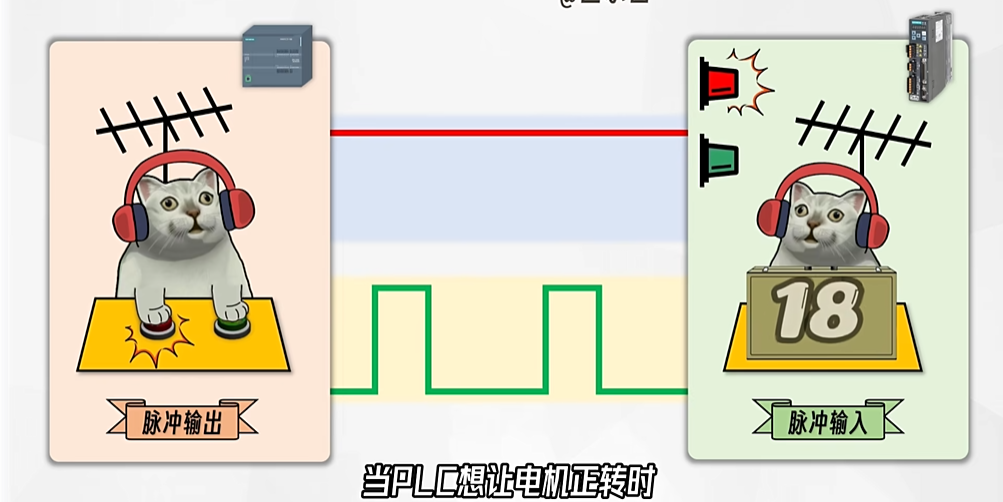
1.2. 如何实现正反转?
当控制卡想让电机正转时,在红灯亮起的状态下按动绿灯
当控制卡想让电机反转时,在红灯熄灭的状态下按动绿灯
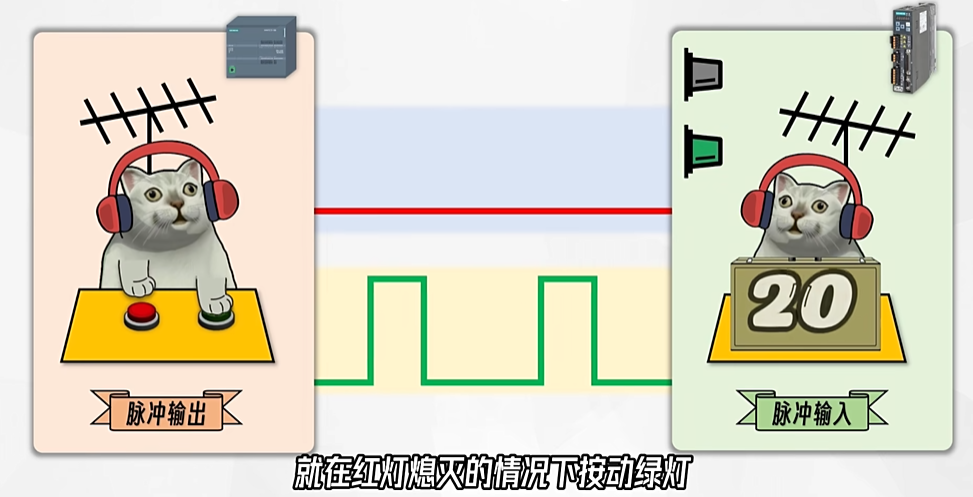
伺服根据红灯决定方向,根据绿灯决定位置和速度,这样就能实现双向的精确定位。
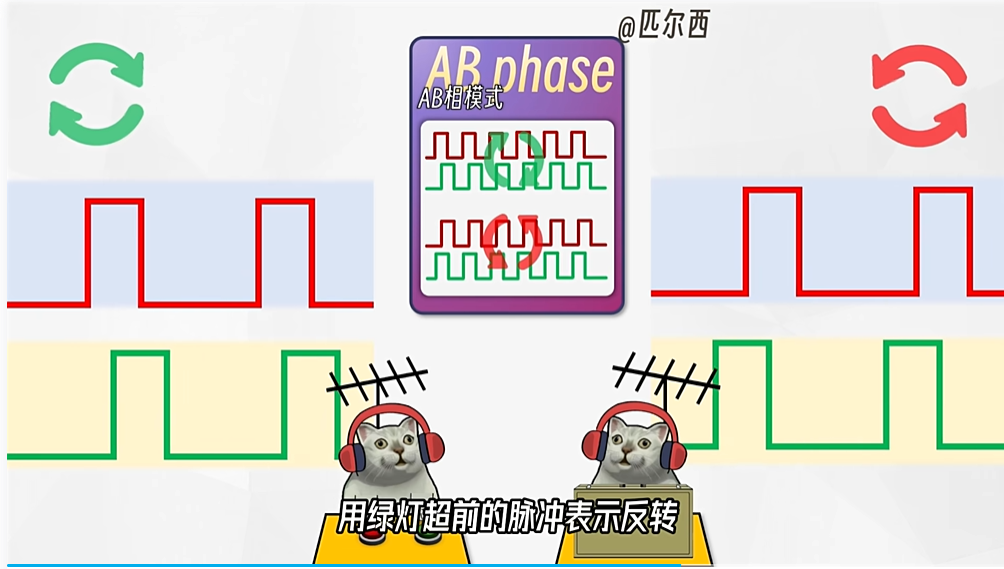
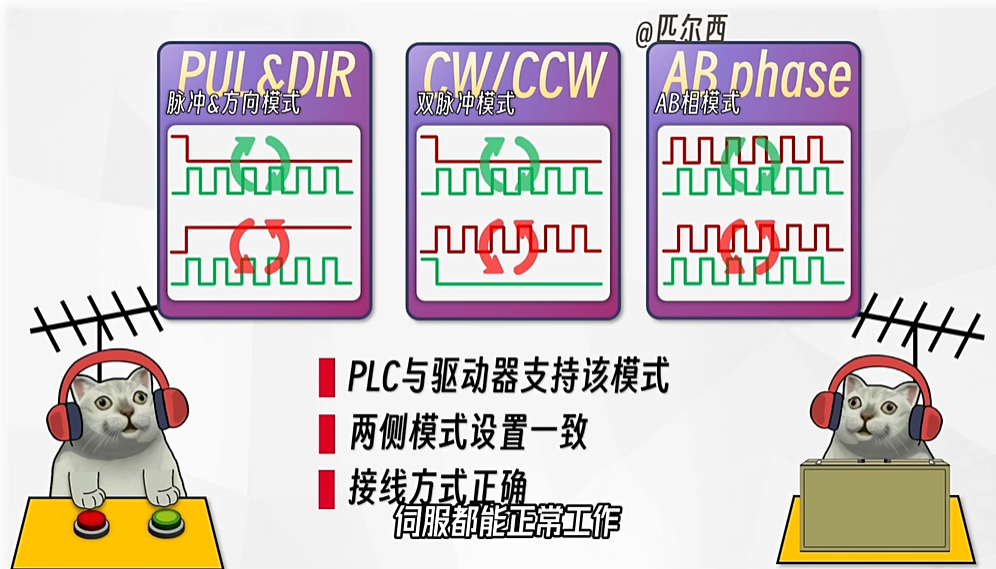
这种方式就是:脉冲 + 方向模式,此外还有双脉冲模式,AB 相模式
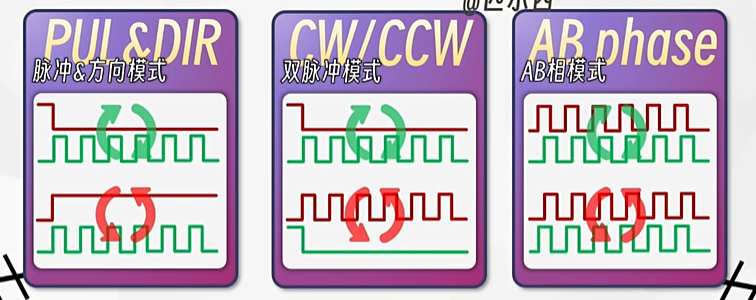
双脉冲模式:用红灯的脉冲表示反转用绿灯的脉冲表示正转

AB 相模式:用红灯超前的脉冲表示正转,用绿灯超前的脉冲表示反转
除了使用脉冲,还可以通过总线通讯的方式向伺服发送数据

1.3. 伺服电机如何依照指令运行到指定的角度?
什么是步进电机、什么是伺服电机
共同点:
1. 都支持位置控制,也就是精确到达某一个位置
差异:
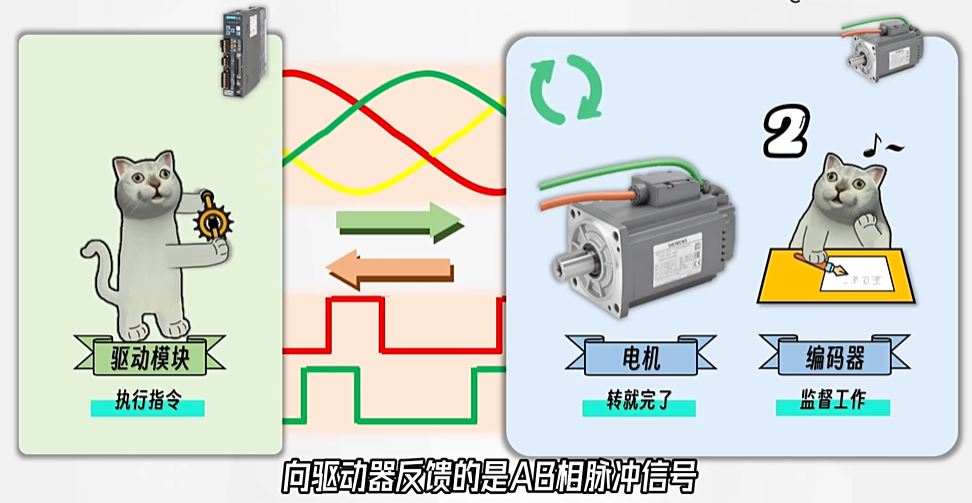
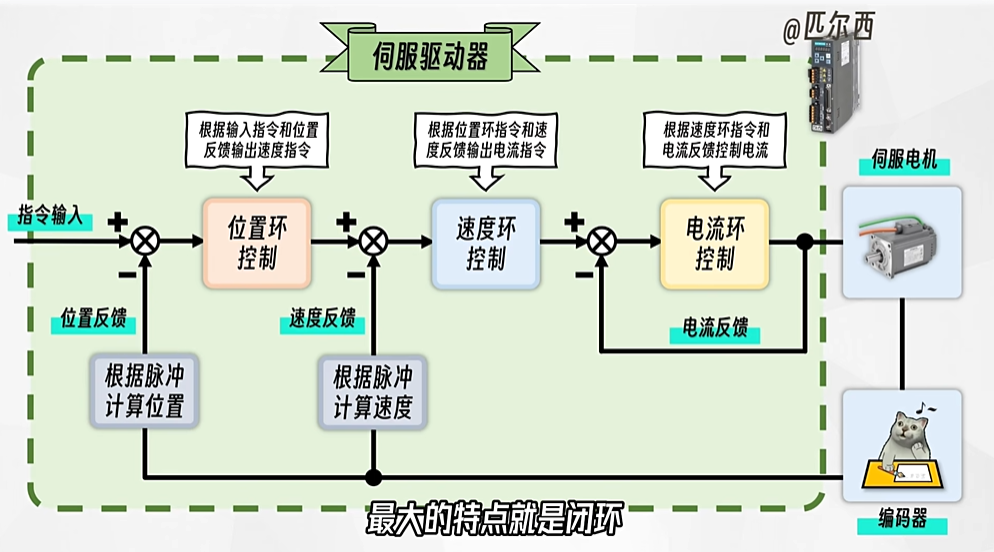
伺服与步进相比,最大的特点就是支持闭环。在伺服电机尾部有一个编码器。常见的增量式编码器,向驱动器反馈的是 AB 相脉冲信号。驱动器通过编码器反馈的脉冲数,可以判断伺服有没有运动到位,如果电机没有转到目标位置,伺服驱动器会持续给电机电流而不是想步进驱动一样,执行完驱动工作后,就会停止电流输出。

2. 电机分辨率(Encoder Resolution / Step Resolution)
单位:pulse/revolution(脉冲每转)“分辨率”决定了 1 个脉冲对应多少机械运动
2.1. 步进电机:
常见为 200 步/转(1.8°/step),但通过细分驱动,可以达到 400,1000,2000 ,50000 pulse/rev
本质:细分只是驱动器的电流控制,改善平滑性和定位精度,但电机实际物理分辨率受机械和磁场影响,不能无限提升
2.2. 伺服电机:
编码器分辨率用 bit 表示:表示,有 16bit 17bit 23bit 24bit,指的是 编码器每旋转一圈 能够输出的离散位置数的二进制位数,
- 16 bit → 2¹⁶ = 65,536 pulse/rev → 最小分辨角 ≈ 360° / 65536 ≈ 0.0055°
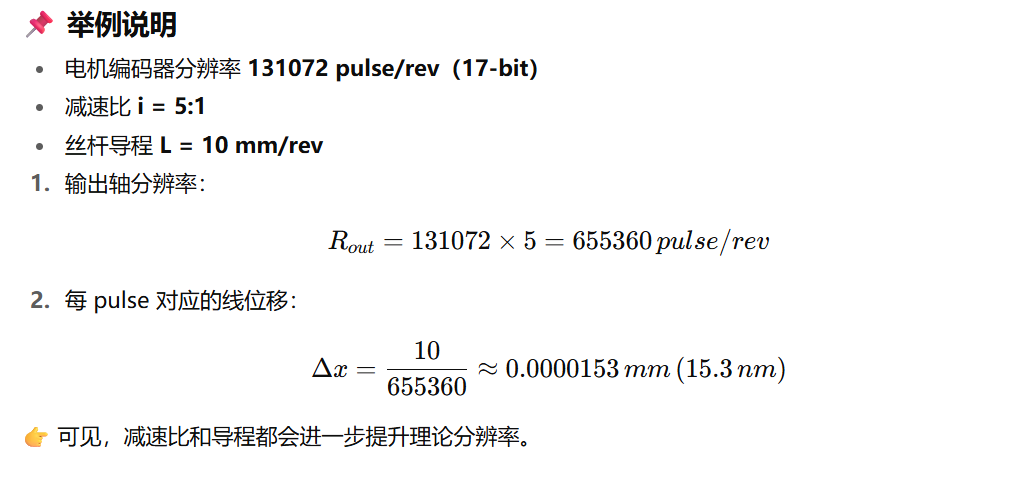
- 17 bit → 131,072 pulse/rev → 最小分辨角 ≈ 0.0027°
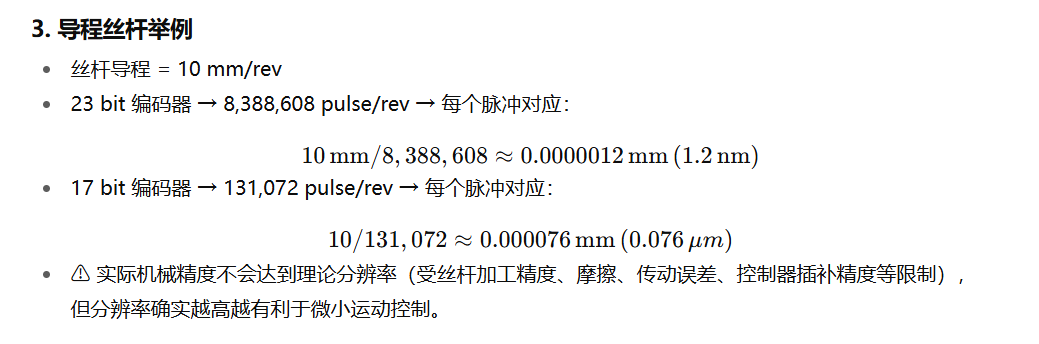
- 23 bit → 8,388,608 pulse/rev
- 24 bit → 16,777,216 pulse/rev
- 编码器分辨率 以 位 bit 16bit 每圈可输出 65536 个脉冲,最小分辨角度约为 0.0055° 如 17-bit = 131072 pulse/rev 最小分辨角度约为 0.0027°
- 位数越高,细分的位数越多。系统对微小运动的控制能力越强,例如 23bit 编码器在 10mm 导程丝杆中可将移动距离细分为 8388608 份 而 17bit 仅为131072 份
- 导程丝杆举例
分辨率越高 == 精度越高 ??
分辨率≠精度
- 分辨率(Resolution)
-
- 指编码器能分成多少个“格子”。
- 比如 23 bit 编码器一圈有 8388608 个格子,每格对应一个理论位置。
- 精度(Accuracy)
-
- 指电机真实位置与理论指令位置的误差。
- 受机械间隙、丝杆误差、传动误差、装配误差、温度变化等影响。
- 重复精度(Repeatability)
-
- 电机多次回到同一点时,位置是否一致。
- 通常比绝对精度更好(比如 ±0.001 mm 级)。
- 高分辨率编码器的优势:
- 提高 位置环、速度环 的控制精度
- 提高低速时的平滑性(避免抖动)
- 提升重复定位精度(特别在小位移运动中)
- 但能否转化为“高精度”,要看:
- 丝杆/齿轮/皮带的传动精度
- 控制器的算法
- 整个机构的刚性和间隙
3. 减速比(Gear Ratio)
减速机的作用是将电机的高速、低扭矩输出,转化为低速、高扭矩输出。
例如:减速比 10:1 → 电机转 10 圈,输出轴只转 1 圈,扭矩则放大约 10 倍。
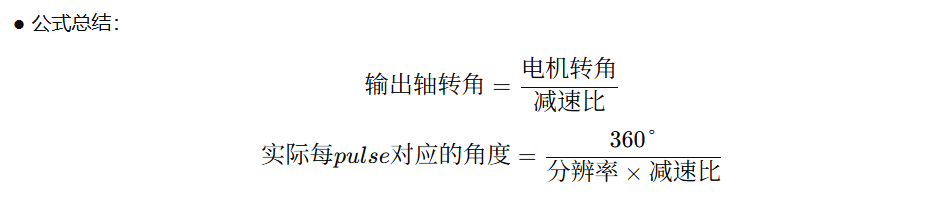
在计算实际输出轴的运动时,必须同时考虑 电机分辨率 与 减速比 的影响。
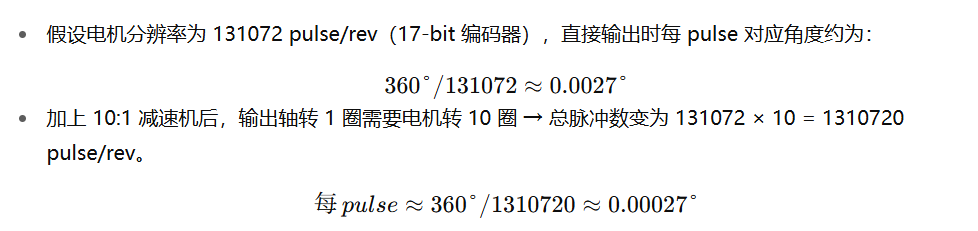
可见,加上减速机后,输出轴的分辨率进一步提高(更细的角度控制),同时输出转速降低,扭矩增大。
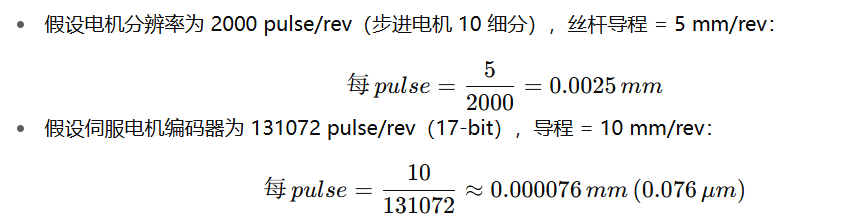
4. 导程(Lead / Pitch)
导程(Lead / Pitch):用于将电机的旋转运动转换为直线运动(典型应用是丝杆、滚珠丝杆)
- 单位:mm/rev
- 例如:导程 = 5 mm → 螺杆转 1 圈,螺母前进 5 mm。
● 导程越大:单位旋转对应的直线位移越大 → 速度更快,但力矩转换效率低,推力减小。
● 导程越小:单位旋转对应的直线位移更小 → 移动更精细,推力更大,适合高精度定位。
导程数值越小,单位脉冲对应的直线位移也越小,控制分辨率更高。
5. 综合
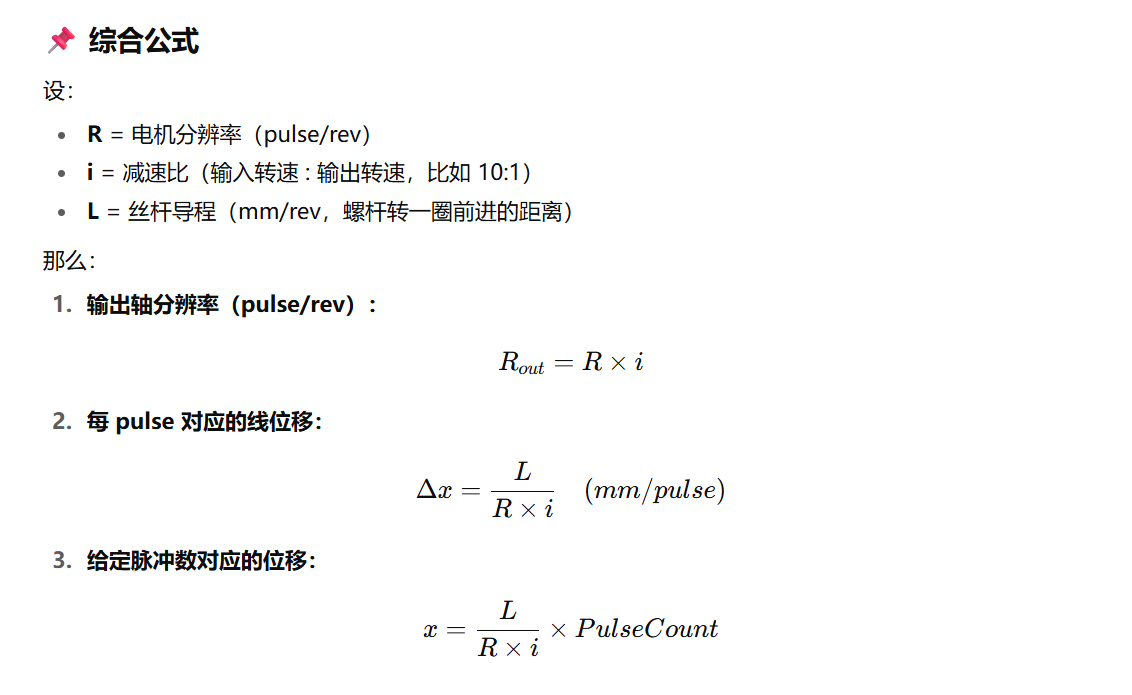
✅ 结论:
- 分辨率(R) 决定旋转最小刻度。
- 减速比(i) 让输出更细致,但速度降低。
- 导程(L) 决定旋转转化为直线的比例。
三者结合,就能算出 脉冲数 → 实际位移 的精确关系。
“三因素作用示意图”(电机→减速机→丝杆→直线运动)
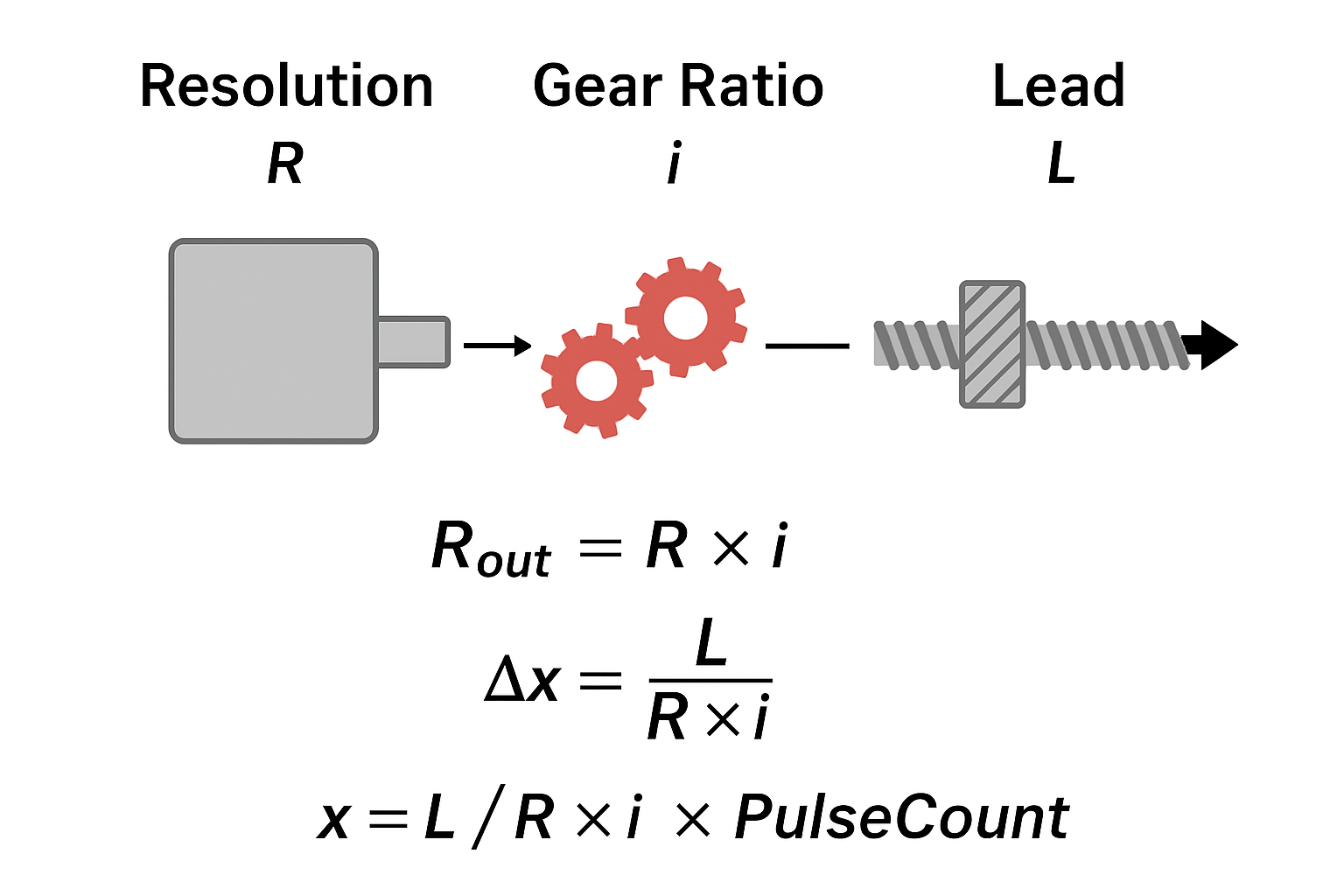
R out = 输出轴分辨率 = R * i = 电机分辨率 * 减速比
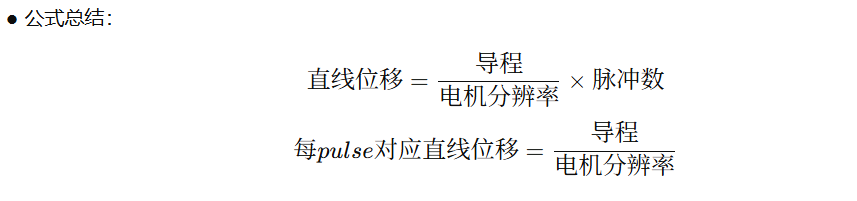
走 X mm = L / R * i * PulseCount = (导程/电机分辨率减速比 ) * 脉冲数量
则 每走 1 个 PulseCount 实际所移动的位移是:L / R * i = 导程 / (电机分辨率 * 减速比)

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)