第五十六章 ESP32S3 网络摄像头实验
本实验支持原子 5640 和 2640 模块,这两个模块的相关资料可在原子提供的《ATK-MC2640 模块用户手册_V1.1》和《ATK-MC5640 模块用户手册 V1.0》用户手册查看。
网络摄像头(Webcam)是一种可以通过网络实时传输视频和音频信号的摄像设备。它与传统摄像头的核心区别在于内置了数字化和网络化的能力,可以直接接入网络(通常通过Wi-Fi或网线),将采集到的画面传输到互联网上的其他设备或平台,无需连接电脑主机。而远端用户可在 PC 上使用标准的网络浏览器,根据网络摄像机的 IP 地址,对网络摄像机进行访问,实时监控目标现场的情况,并可对图像资料实时编辑和存储,同时还可以控制摄像机的云台和镜头,进行全方位地监控。本章的实验是以网络调试助手作为客户端,开发板作为服务器。服务器把摄像头处理的数据使用网卡发送至服务器当中,并且在服务器实时更新图像。
本章分为如下几个部分:
56.1 ATK-MC5640&MC2640 简介
56.2 硬件设计
56.3 软件设计
56.4 下载验证
56.1 ATK-MC5640&MC2640 简介
本实验支持原子 5640 和 2640 模块,这两个模块的相关资料可在原子提供的《ATK-MC2640 模块用户手册_V1.1》和《ATK-MC5640 模块用户手册 V1.0》用户手册查看。
56.2 硬件设计
1. 例程功能
本章实验功能简介:开发板主控芯片通过 SCCB 协议对ATK-MC2640 模块中的摄像头传感器进行配置等通讯,并通过 CAMERA 接口获取ATK-MC2640 模块输出的 JPEG 图像数据,然后将获取到的图像实时的发往至UartDisplay这个软件(使用原子的 ATK-XCAM 2.4 软件,收到一帧数据后会出现闪退,系统是Win11 )。
2. 硬件资源
1) LED 灯
LED-IO1
2) XL9555
IIC_INT-IO0(需在 P5 连接 IO0)
IIC_SDA-IO41
IIC_SCL-IO42
3) SPILCD
CS-IO21
SCK-IO12
SDA-IO11
DC-IO40(在 P5 端口,使用跳线帽将 IO_SET 和 LCD_DC 相连)
PWR- IO1_3(XL9555)
RST- IO1_2(XL9555)
4) CAMERA
OV_SCL-IO38
OV_SDA- IO39
VSYNC- IO47
HREF- IO48
PCLK- IO45
D0- IO4
D1- IO5
D2- IO6
D3- IO7
D4- IO15
D5- IO16
D6- IO17
D7- IO18
RESET-IO0_5(XL9555)
PWDN-IO0_4(XL9555)
3. 原理图
CAMERA 接口与 ESP32-S3 的连接关系,如下图所示:
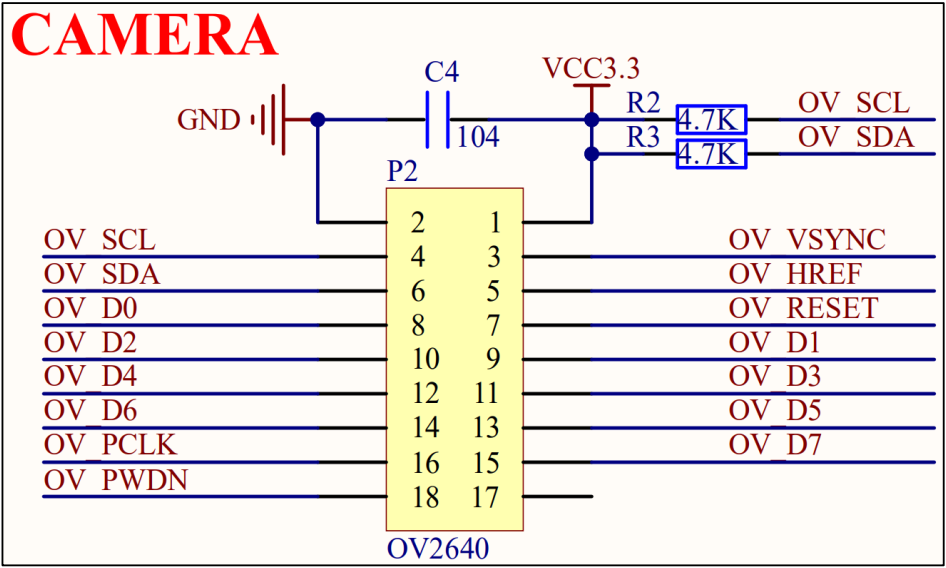
图 56.2.1 CAMERA 接口与 ESP32-S3 的连接电路图
56.3 软件设计
56.3.1 程序流程图
本实验的程序流程图:
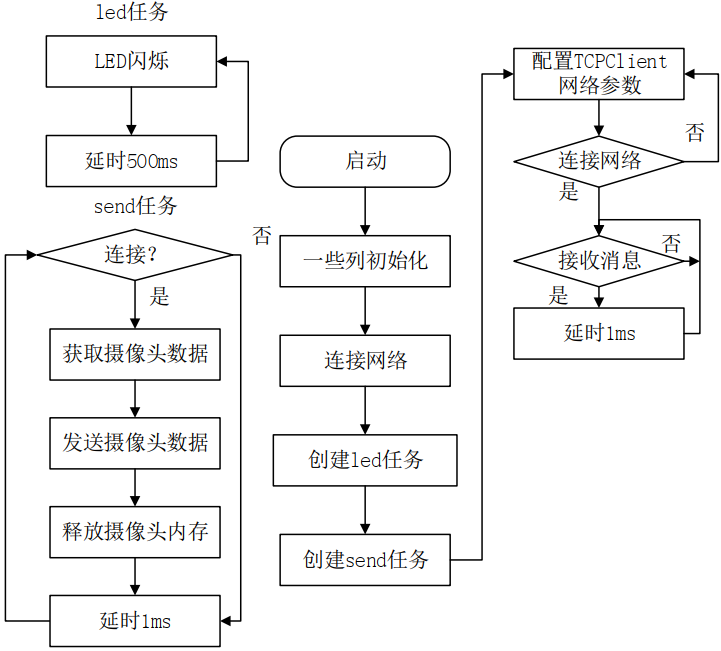
图 56.3.1.1 程序流程图
56.3.2 程序解析
在本章节中,主要关注两个文件: lwip_demo.c 和 lwip_demo.h。 lwip_demo.h 文件主要声明了 lwip_demo 函数。主要关注点是 lwip_demo.c文件中的函数。在 lwip_demo 函数中,配置了相关的 TCPClient 参数,并创建了一个名为lwip_send_thread 的发送数据线程。这个线程通过调用 scokec 函数来发送数据到服务器。接下来,将分别详细解释 lwip_demo 函数和lwip_send_thread 任务。
/* 需要自己设置远程IP地址,电脑IP地址 */
#define IP_ADDR "192.168.1.2"
#define LWIP_DEMO_RX_BUFSIZE 128 /* 最大接收数据长度 */
#define LWIP_DEMO_PORT 8080 /* 连接的本地端口号 */
#define LWIP_SEND_THREAD_PRIO 10 /* 发送数据线程优先级 */
/* 接收数据缓冲区 */
char g_lwip_demo_recvbuf[LWIP_DEMO_RX_BUFSIZE];
/* 数据发送标志位 */
uint8_t g_lwip_send_flag;
int g_sock = -1;
int g_lwip_connect_state = 0;
static void lwip_send_thread(void *arg);
/**
* @brief 发送数据线程
* @param 无
* @retval 无
*/
void lwip_data_send(void)
{
xTaskCreate(lwip_send_thread, "lwip_send_thread", 2*1024, NULL, LWIP_SEND_THREAD_PRIO, NULL);
}
/**
* @brief lwip_demo实验入口
* @param 无
* @retval 无
*/
void lwip_demo(void)
{
int err;
struct sockaddr_in atk_client_addr;
int recv_data_len;
char *tbuf;
char host_ip[] = IP_ADDR;
lwip_data_send(); /* 创建发送数据线程 */
while (1)
{
sock_start:
g_lwip_connect_state = 0;
inet_pton(AF_INET, host_ip, &atk_client_addr.sin_addr);
atk_client_addr.sin_family = AF_INET; /* 表示IPv4网络协议 */
atk_client_addr.sin_port = htons(LWIP_DEMO_PORT); /* 端口号 */
g_sock = socket(AF_INET, SOCK_STREAM, IPPROTO_IP); /* 可靠数据流交付服务既是TCP协议 */
memset(&(atk_client_addr.sin_zero), 0, sizeof(atk_client_addr.sin_zero));
tbuf = malloc(200); /* 申请内存 */
sprintf((char *)tbuf, "Port:%d", LWIP_DEMO_PORT); /* 客户端端口号 */
spilcd_show_string(5, 170, 200, 16, 16, tbuf, MAGENTA);
/* 连接远程IP地址 */
err = connect(g_sock, (struct sockaddr *)&atk_client_addr, sizeof(atk_client_addr));
if (err == -1)
{
spilcd_show_string(5, 190, 200, 16, 16, "State:Disconnect", MAGENTA);
free(tbuf);
goto sock_start;
}
spilcd_show_string(5, 190, 200, 16, 16, "State:Connection", MAGENTA);
g_lwip_connect_state = 1;
while (1)
{
recv_data_len = recv(g_sock,g_lwip_demo_recvbuf,
sizeof(g_lwip_demo_recvbuf) - 1,0);
if (recv_data_len <= 0)
{
g_lwip_connect_state = 0;
close(g_sock);
g_sock = -1;
ESP_LOGE("TAG", "recv failed: errno %d", errno);
break;
}
else
{
g_lwip_demo_recvbuf[recv_data_len] = 0;
ESP_LOGI("TAG", "Received %d bytes from %s:", recv_data_len, host_ip);
ESP_LOGI("TAG", "%s", g_lwip_demo_recvbuf);
}
}
}
}
/**
* @brief 发送数据线程函数
* @param pvParameters : 传入参数(未用到)
* @retval 无
*/
void lwip_send_thread(void *pvParameters)
{
pvParameters = pvParameters;
camera_fb_t *camera_frame = NULL;
while (1)
{
if (g_lwip_connect_state == 1 && g_sock >= 0) /* 有数据要发送 */
{
camera_frame = esp_camera_fb_get();
if (camera_frame)
{
int sent = send(g_sock, camera_frame->buf, camera_frame->len,0);
if (sent <= 0)
{
g_lwip_connect_state = 0; // 发送失败时重置连接状态
}
}
esp_camera_fb_return(camera_frame);
}
vTaskDelay(pdMS_TO_TICKS(1));
}
}
首先创建了一个用于发送 ESP32-S3 设备数据的任务。然后,对 TCPClient进行网络参数配置,并调用 connect 函数来建立与远程服务器的连接。当连接成功时,系统将进入接收轮询任务。如果出现断开连接的情况,系统将尝试重新连接服务器。在发送线程中,发送数据前会检查连接标志位。如果标志位有效,则通过esp_camera_fb_get获取图像信息,然后使用Send函数发送摄像头图像数据给电脑。
56.4 下载验证
在程序中,首先需要设置好能够连接的WIFI账号(DEFAULT_SSID宏)、密码(DEFAULT_PWD宏)及远程IP(IP_ADDR)信息。然后,使用笔记本电脑作为终端,确保它与 ESP32-S3 设备处于同一网络段内。当 ESP32-S3 设备成功连接到网络时,它的 LCD 显示屏上会显示相应的内容:
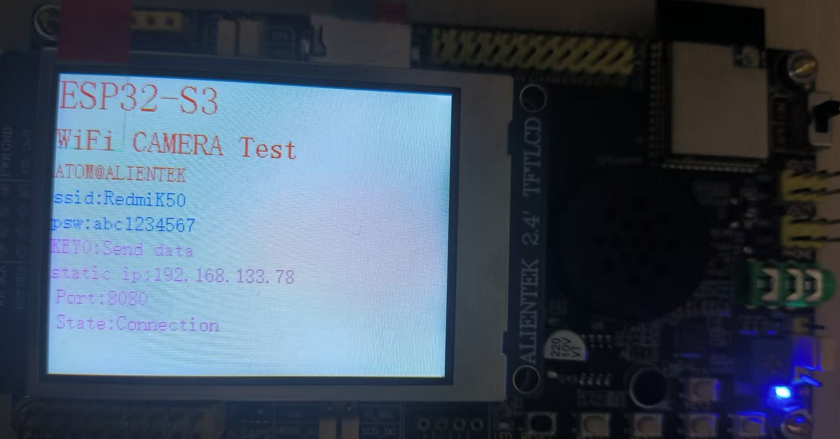
图 56.4.1 设备连接到网络时, LCD 显示的信息
打开视频传输上位机,然后配置网络参数,如 TCPServer 协议、端口号等,最后点击连接,如下图所示。

图 56.4.2 视频传输上位机显示内容

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 18
18 0
0- 0



 已为社区贡献28条内容
已为社区贡献28条内容

所有评论(0)