⚡ 一文搞懂 FOC + SVPWM + 串级 PID 电机控制
该文系统介绍了PID控制原理及实现方法,主要内容包括:1. PID控制基本原理,由比例、积分、微分三部分组成;2. PID初始化函数PID_Init()的参数设置及限幅作用;3. 单环PID计算函数PID_SingleCalc()的工作流程;4. 串级PID控制函数PID_CascadeCalc()的结构与优势;5. 实用的PID调参技巧和应用场景。文章通过代码解析详细说明了位置环和速度环的双环控
🌀 1. 前言
在永磁同步电机(PMSM)或无刷直流电机(BLDC)的高性能控制中,FOC(Field Oriented Control,磁场定向控制) 是最常用的算法之一。 为了获得更平滑的转矩、更快的动态响应和更好的稳态精度,我们通常会结合:
-
SVPWM(空间矢量脉宽调制) — 高效利用直流母线电压,输出三相电压;
-
串级 PID 控制 — 外环控制位置或速度,内环精确调节转矩或电流。
下文结合实际代码,带你一步步理解这种控制结构的运行机制。
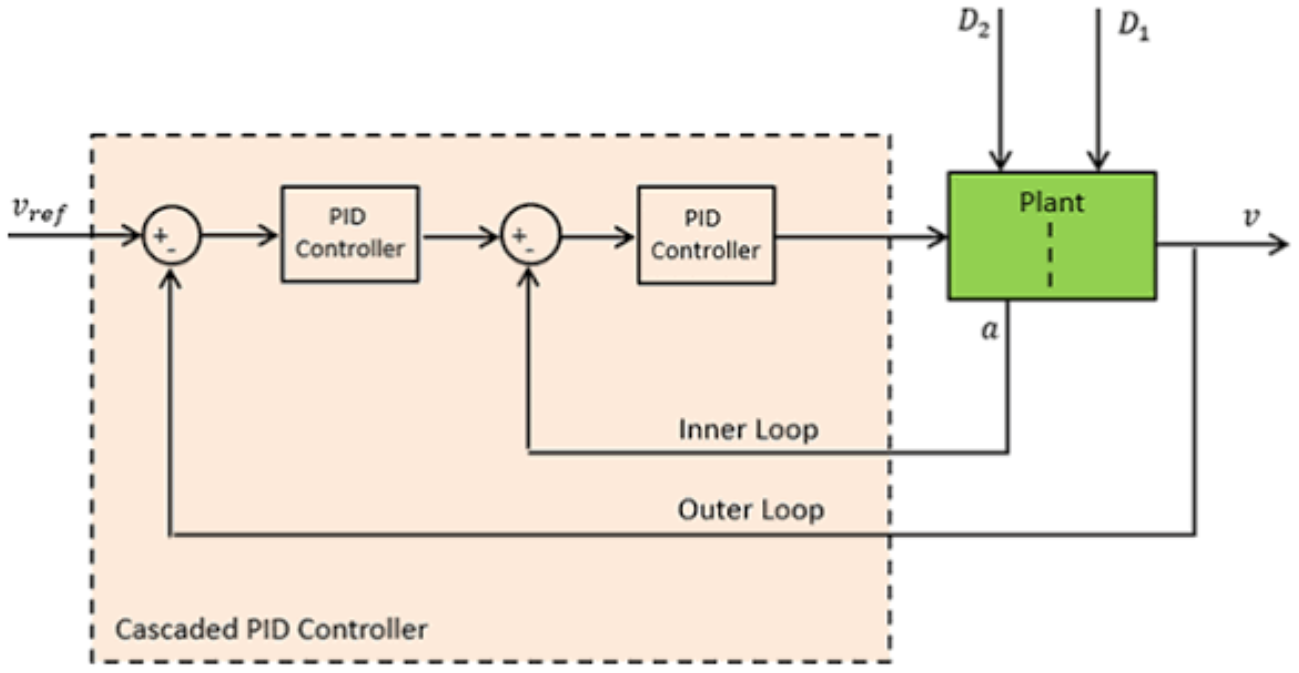
⚙️ 2. 控制系统结构
一个典型的 FOC + SVPWM + 串级 PID 系统结构如下👇:
+-------------------+ target --->| 外环PID(位置) |--- target_speed --->+------------------+ +-------------------+ | 内环PID(速度) |----> Uq +--+------------------+ | v SVPWM模块 | 三相PWM输出 | 电机本体 | 编码器 / 磁编码器反馈
-
外环(位置 PID):计算当前位置与目标位置的误差,输出目标速度;
-
内环(速度 PID):根据目标速度与实际速度误差,输出控制电压 UqU_qUq;
-
SVPWM:将 UqU_qUq 转换为三相 PWM,占空比输出;
-
电机:响应 PWM 电压,旋转,编码器反馈闭环。
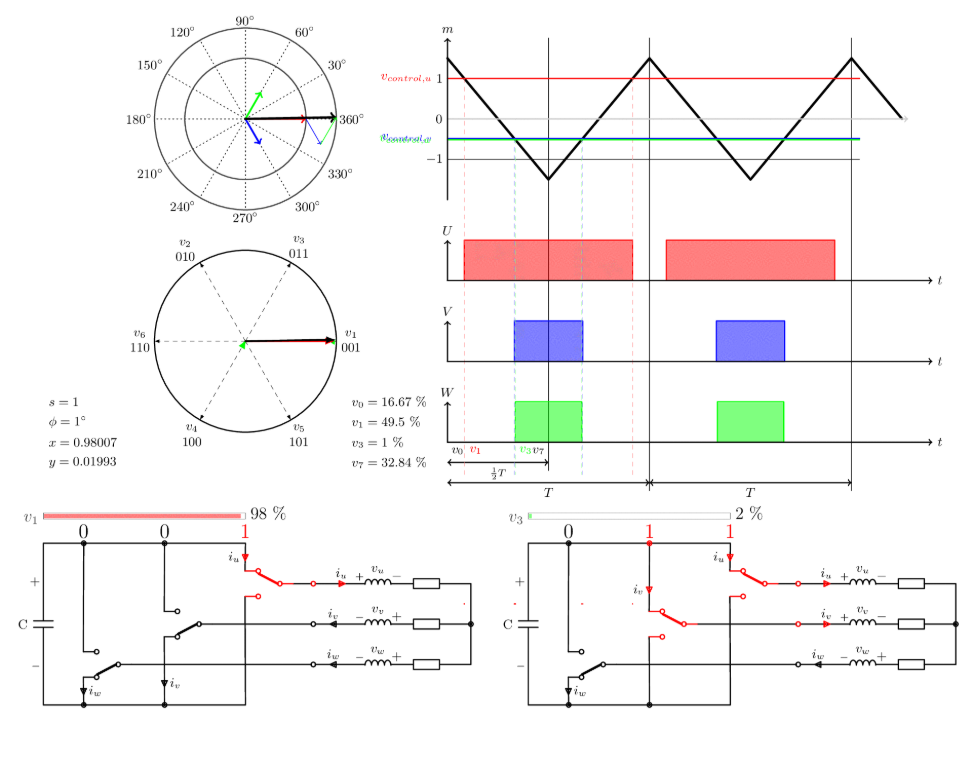
🧮 3. SVPWM 算法实现
SVPWM 核心就是根据期望的 UqU_qUq、UdU_dUd 和电角度 θ\thetaθ,计算三相 PWM 占空比。
void motor_setPhaseVoltage(motor_t *m, float Uq, float Ud)
{
float angle_el;
angle_el = m->elecAngle = normalizeAngle(
(float)(motor_DIR * motor_PP) * m->as->rad - m->zeroAngle);
// 处理负的Uq分量 - 将角度旋转180度
if (Uq < 0)
angle_el += _PI_;
Uq = myabs(Uq);
// 将角度规范化到[0, 2π)范围,并旋转90度
angle_el = normalizeAngle(angle_el + _PI_2);
// 确定电压矢量所在的扇区(1-6)
int sector = floor(angle_el / _PI_3) + 1;
// 计算基本电压矢量的作用时间
float T1 = _SQRT3 * sin(sector * _PI_3 - angle_el) * Uq / POWER;
float T2 = _SQRT3 * sin(angle_el - (sector - 1.0) * _PI_3) * Uq / POWER;
float T0 = 1 - T1 - T2;
// 三相PWM占空比
float Ta, Tb, Tc;
switch (sector) {
case 1: Ta = T1 + T2 + T0/2; Tb = T2 + T0/2; Tc = T0/2; break;
case 2: Ta = T1 + T0/2; Tb = T1 + T2 + T0/2; Tc = T0/2; break;
case 3: Ta = T0/2; Tb = T1 + T2 + T0/2; Tc = T2 + T0/2; break;
case 4: Ta = T0/2; Tb = T1 + T0/2; Tc = T1 + T2 + T0/2; break;
case 5: Ta = T2 + T0/2; Tb = T0/2; Tc = T1 + T2 + T0/2; break;
case 6: Ta = T1 + T2 + T0/2; Tb = T0/2; Tc = T1 + T0/2; break;
default: Ta = Tb = Tc = 0;
}
// 转换为实际电压
m->Ua = _constrain(Ta * POWER, 0, POWER);
m->Ub = _constrain(Tb * POWER, 0, POWER);
m->Uc = _constrain(Tc * POWER, 0, POWER);
// 输出PWM
setPwm(m);
}
📌 关键点说明:
-
这里用的是 反 Clarke + Park 变换之后的 SVPWM;
-
通过
sector判断矢量所在扇区; -
T1T_1T1、T2T_2T2、T0T_0T0 分别是作用时间;
-
Ta/Tb/Tc经过限幅后输出给定时器 PWM 通道; -
Uq控制转矩,Ud理论上设为 0,表示磁链方向电流最小损耗。
🧠 4. 串级 PID 控制器
代码中定义了两个 PID:
// 外环 PID(位置) PID_Init(&pid1.pid1, 2.0f, 0.0f, 0.5f, 0.0f, POWER); // 内环 PID(速度) PID_Init(&pid1.pid2, 20.0f, 0.0f, 13.0f, 0.0f, POWER);
-
外环增益较小,响应慢,主要用来给速度环设定目标;
-
内环增益较大,响应快,保证电机能快速达到目标速度。
串级计算函数:
void PID_CascadeCalc(CascadePID *pid, float target, float feedBack1, float feedBack2)
{
PID_SingleCalc(&pid->pid1, target, feedBack1); // 位置环
PID_SingleCalc(&pid->pid2, pid->pid1.output, feedBack2); // 速度环
pid->output = pid->pid2.output;
}
-
feedBack1是位置反馈(比如编码器角度); -
feedBack2是速度反馈(比如编码器测速); -
pid1.output是外环 PID 输出,作为内环目标速度; -
最终
pid->output是Uq,直接送到 SVPWM。
🧭 5. 实际任务循环
结合前面所有部分,任务循环如下👇
CascadePID pid1;
PID_Init(&pid1.pid1, 2.0f ,0.0f,0.5f,0.0f,POWER);
PID_Init(&pid1.pid2, 20.0f ,0.0f,13.0f,0.0f,POWER);
motor_init(&m1);
motor_EN(&m1,1);
float targetPos = -0.9f;
for(;;)
{
m1.as->speed = as5600_getSpeed(m1.as);
// 串级 PID
PID_CascadeCalc(&pid1, targetPos, m1.as->relativeRad, m1.as->speed);
// FOC + SVPWM 输出
motor_setPhaseVoltage(&m1, pid1.output, 0);
vTaskDelay(pdMS_TO_TICKS(5));
}
🚀 执行过程:
-
读取编码器角度和速度;
-
外环 PID 根据目标位置计算目标速度;
-
内环 PID 根据目标速度和实际速度计算 UqU_qUq;
-
SVPWM 将 UqU_qUq 转换为三相 PWM;
-
PWM 输出到驱动器 → 电机运动;
-
下一个周期重复。
📈 6. 时间响应曲线(仿真)
我使用 Python 简单仿真了这个控制结构,得到如下典型曲线👇
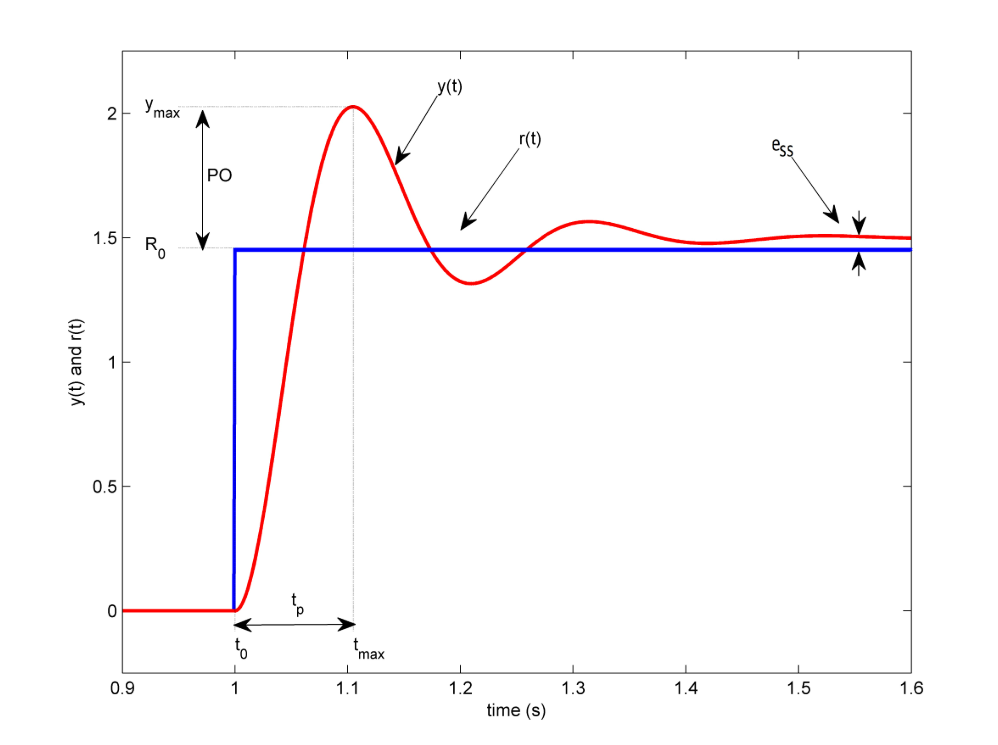
-
蓝线:实际位置
-
橙线:目标位置
特点:
-
位置环响应平滑,没有大的振荡;
-
速度环响应快,稳态误差小;
-
内环电压输出随误差自动调节,实现稳定收敛。
🧰 7. 参数调节建议
| 环节 | 主要作用 | 调节原则 |
|---|---|---|
| 速度环 PID | 决定响应速度和稳定性 | 先调这个,使电机能跟速稳定;P 大响应快,D 抑制超调 |
| 位置环 PID | 决定运动轨迹和收敛性能 | 后调这个,P 决定轨迹跟踪速度;过大易震荡 |
| SVPWM | 提高电压利用率,抑制谐波 | 一般无需调参,逻辑固定 |
| 电压限幅 | 防止过冲/过流 | 建议设为母线电压或安全值 |
📝 8. 总结
通过以上内容,我们已经搭建了一个标准的:
✅ FOC 矢量控制 ✅ SVPWM 驱动逆变 ✅ 串级 PID 闭环调节
这样的控制框架广泛应用于:
-
无刷电机定位与稳速系统
-
机械臂关节伺服
-
航模云台
-
精密运动控制设备
相较于传统的单环控制,这种结构能:
-
提高系统动态响应;
-
降低位置环震荡;
-
获得更高控制精度;
-
提升电压利用率与电机效率。
📚 参考
-
Modern Control of Electric Machines
-
STMicroelectronics 应用笔记 AN4509 — “FOC of PMSM Motor”
-
STM32CubeMX / FreeRTOS 工程实践

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 21
21 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)