一、永磁同步电机控制逻辑学习笔记
本文摘要:文章系统阐述了电机调速控制原理与方法。核心内容包括:1)调速逻辑基于定子磁场对转子磁场的控制;2)运动方程揭示了转矩差决定加速度的原理;3)转矩角在0-90°和90-180°的不同作用;4)三种电流矢量生成方式(三相、两相对称、两相直流);5)坐标变换的向量投影方法;6)FOC实现对转矩角的最佳控制;7)市场常见控制方式(开环强拖与闭环运行)及其具体实现方案。全文构建了从基础理论到实际应
1、调速逻辑
一个定子磁场带动另一个转子磁场旋转;
控制定子磁场旋转的速度,就可以控制转子的旋转速度;


调速的核心就是控制定子电流合成矢量。
2、运动方程

内涵:速度的变化率(加速度)取决于电磁转矩与负载转矩的差值;
总结:控制电磁转矩--->影响加速度--->影响转速;
3、转矩角
转矩角的定义:定子磁场与转子磁场之间的夹角。
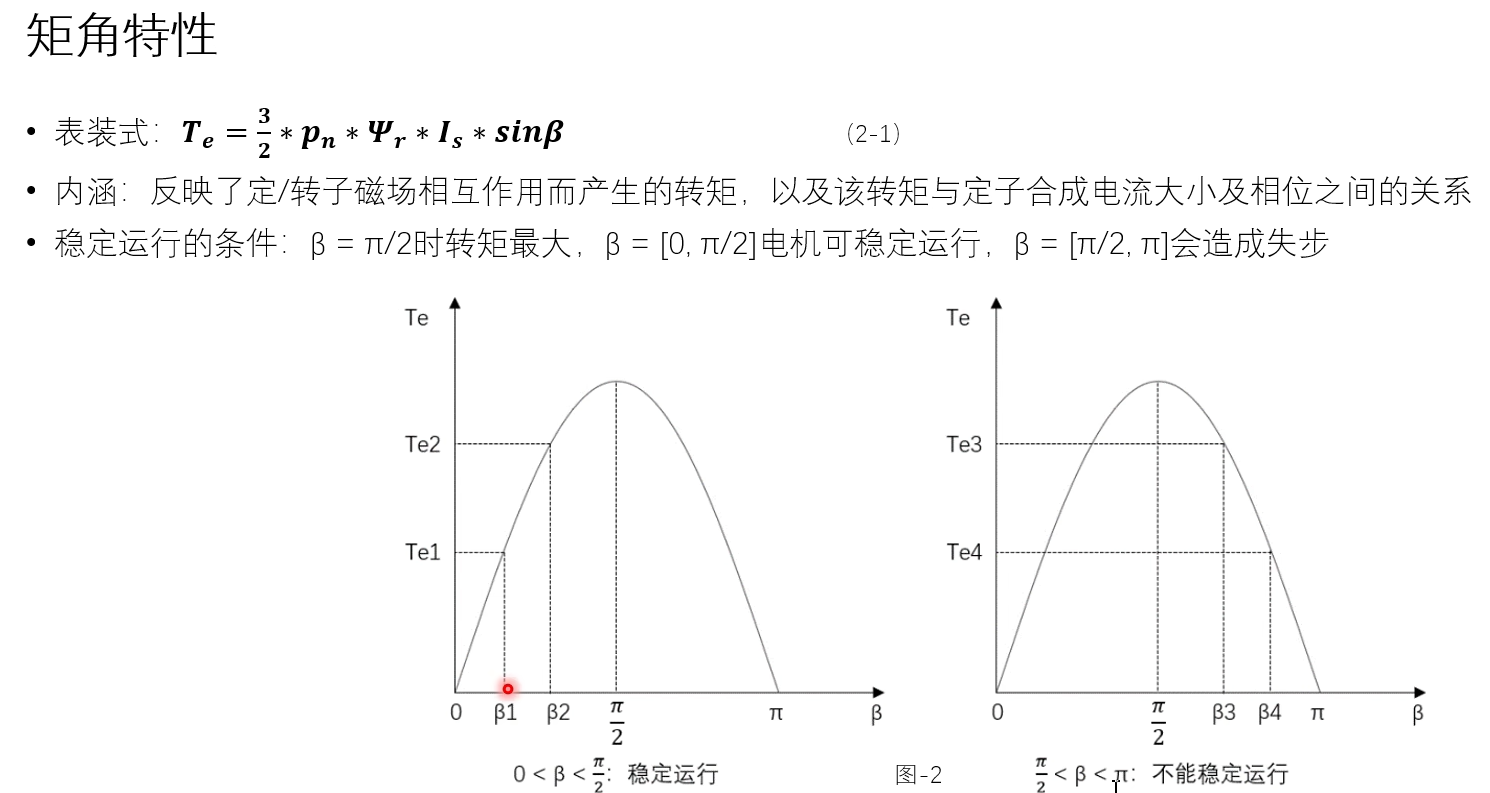
转矩角在0°到90°之间;如果负载转矩变大,那么增大转矩角就可以实现电磁转矩的增大,最终达到电磁转矩与负载转矩平衡的状态;
转矩角在90°到180°之间;如果负载转矩变大,那么增大转矩角就会导致电磁转矩的减小,最终造成电机失步;

4、合成电流矢量的生成方式
4.1、三相定子绕组加载三相对称电流
三相对称电流:每一相都是正弦波电流,每一相相差120°;
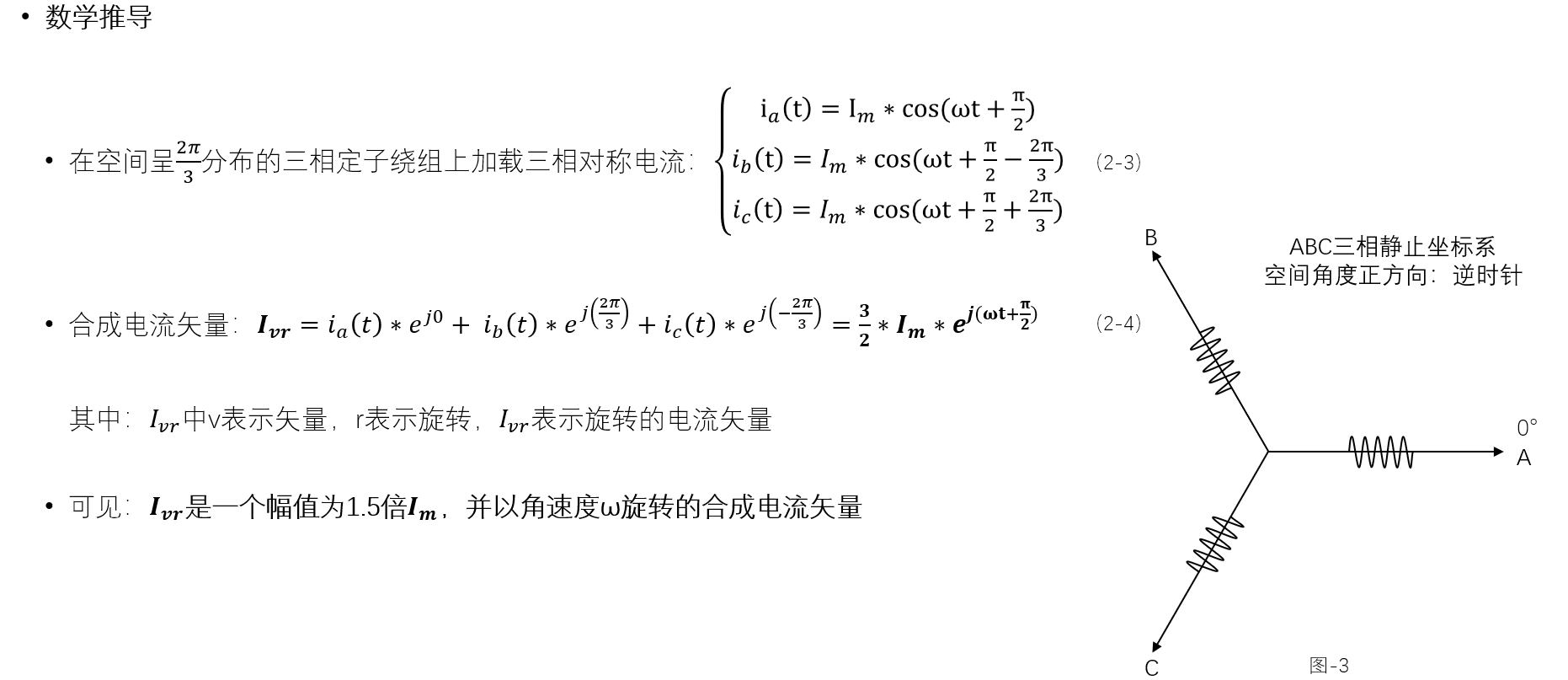
合成电流矢量就是每一相电流乘以它自己空间的位置;a相的电流乘以a相的空间位置;b相的电流乘以b相的空间位置;c相的电流乘以c相的空间位置;
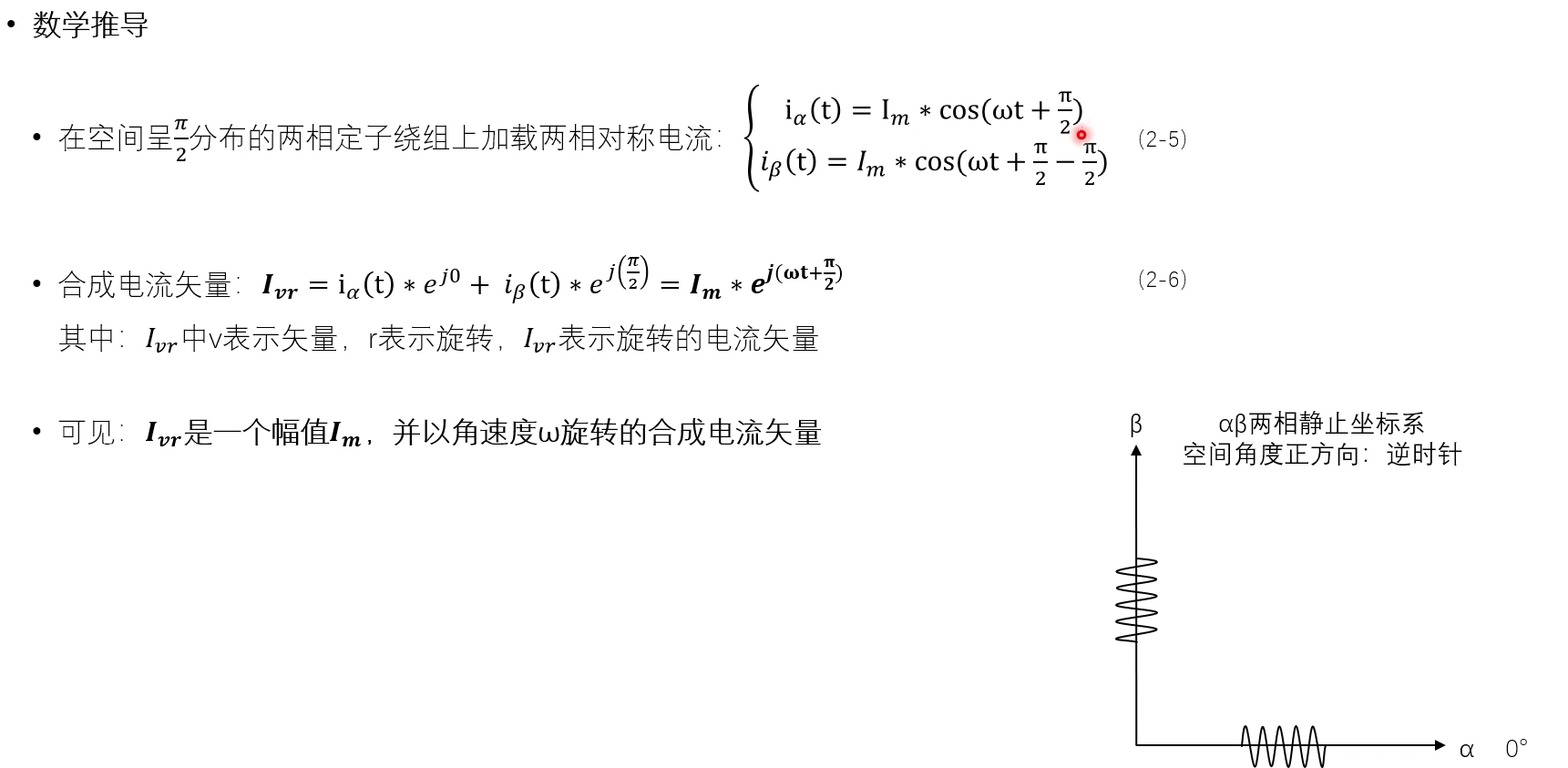
4.2、两相定子绕组加载两相对称电流
两相对称电流:正弦电流,相位上相差90°;
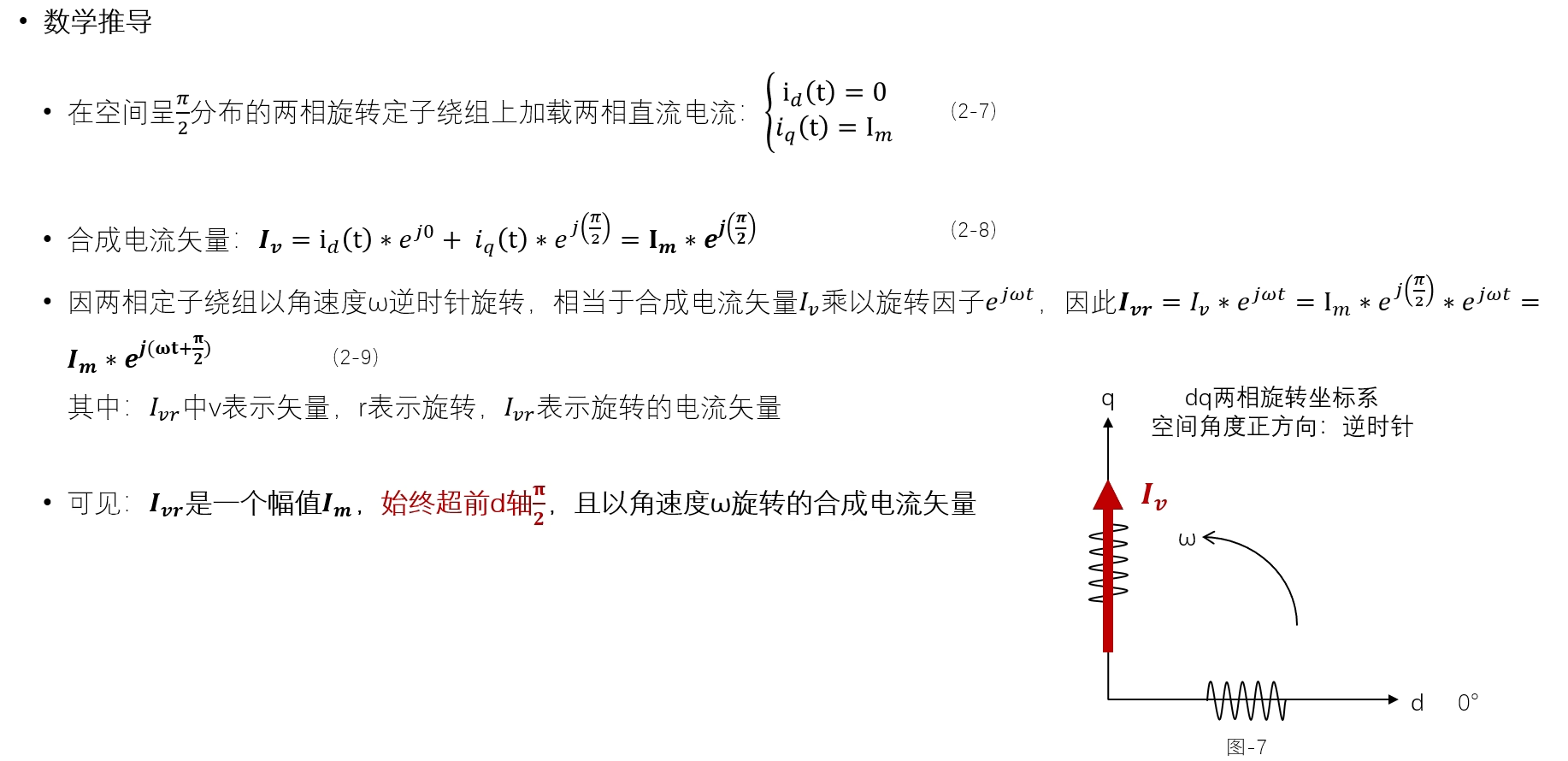
4.3、两相旋转定子绕组上加载两相直流电流
4.4三种生成方式的分析

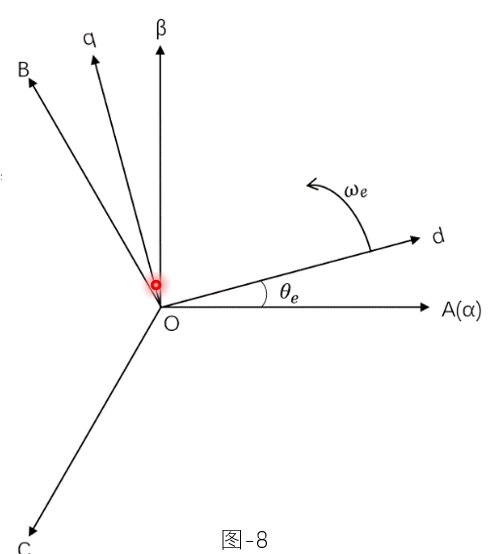
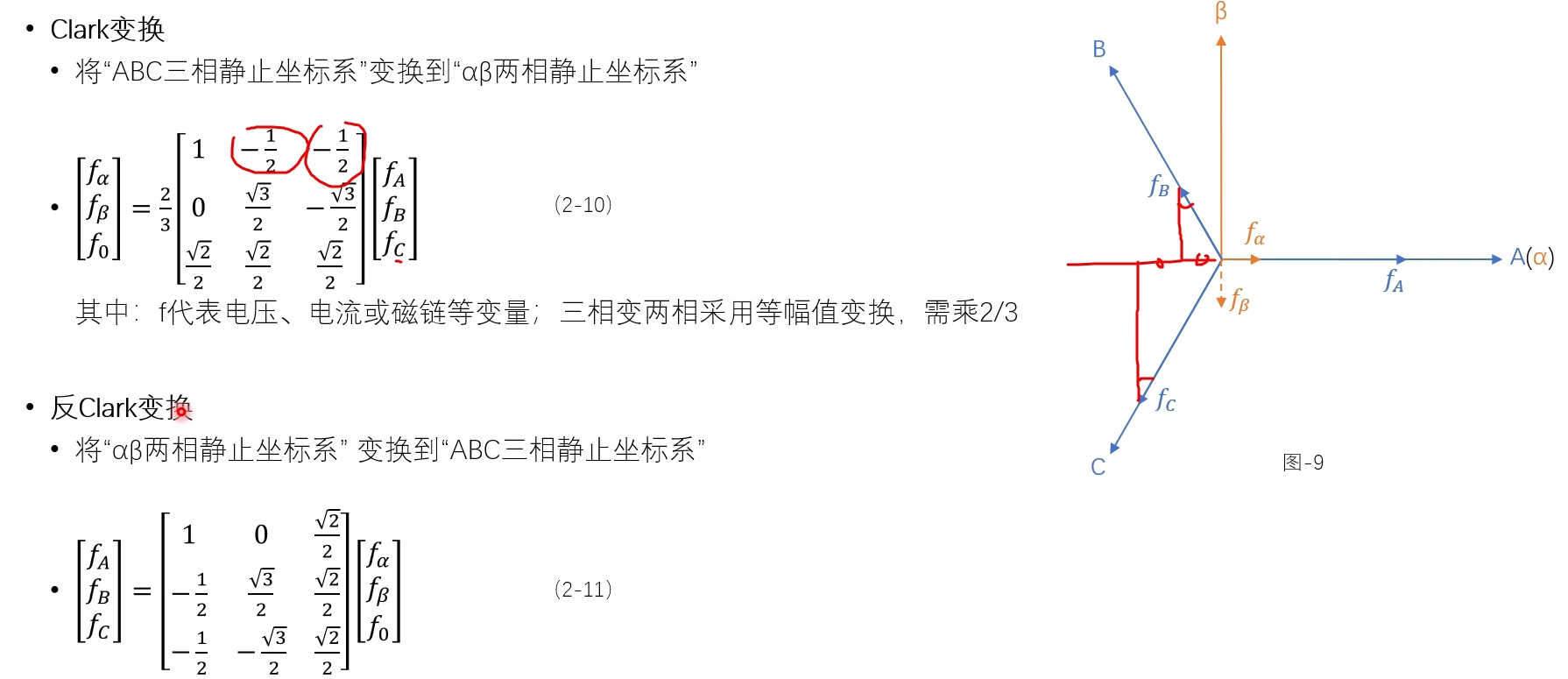
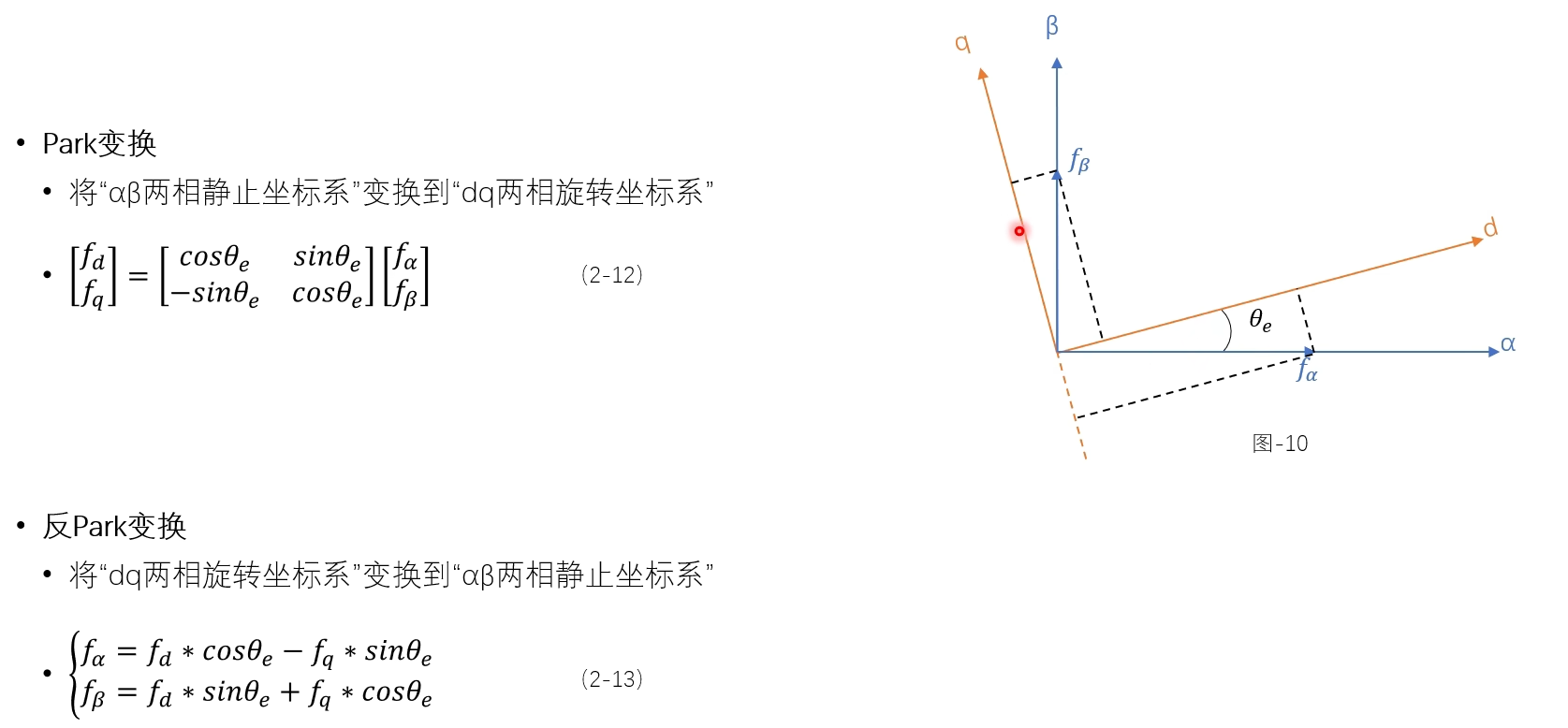
5、坐标变换
基于向量投影的原理,目标坐标系某轴分量 = 原坐标系各轴分量 投影到 目标坐标轴的代数和;
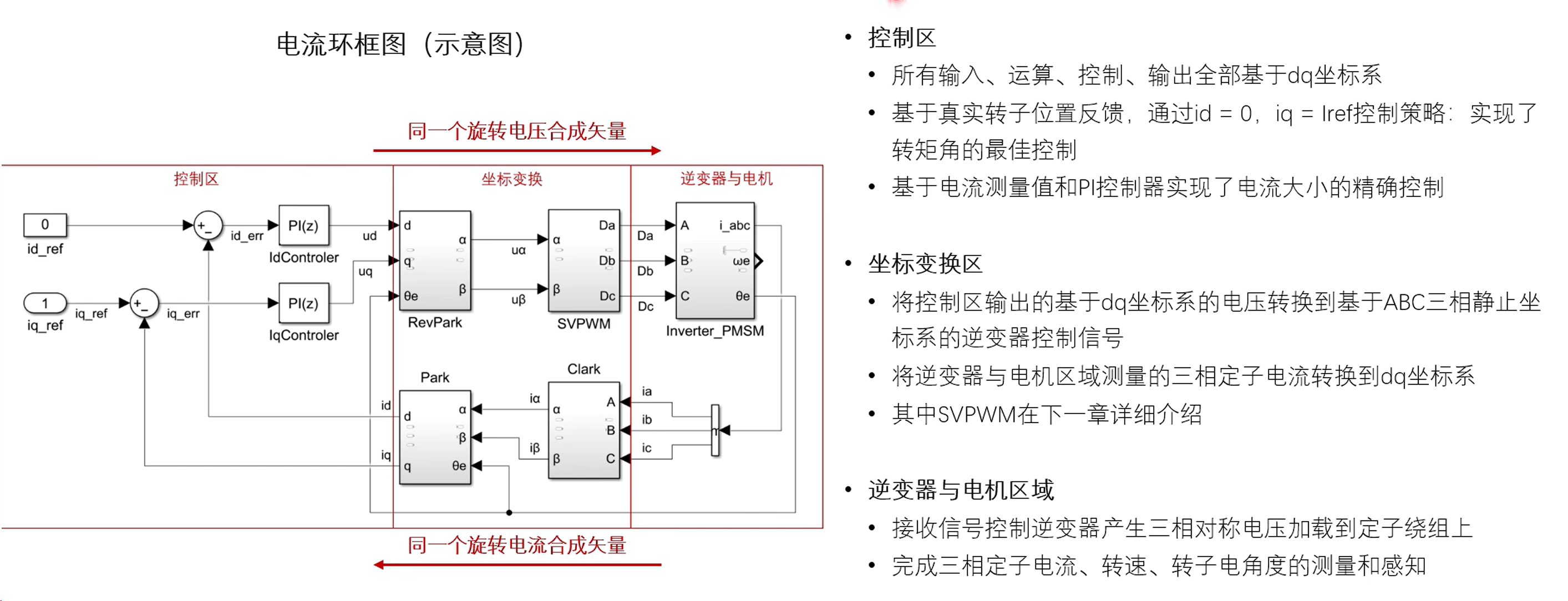
6、foc磁场定向控制
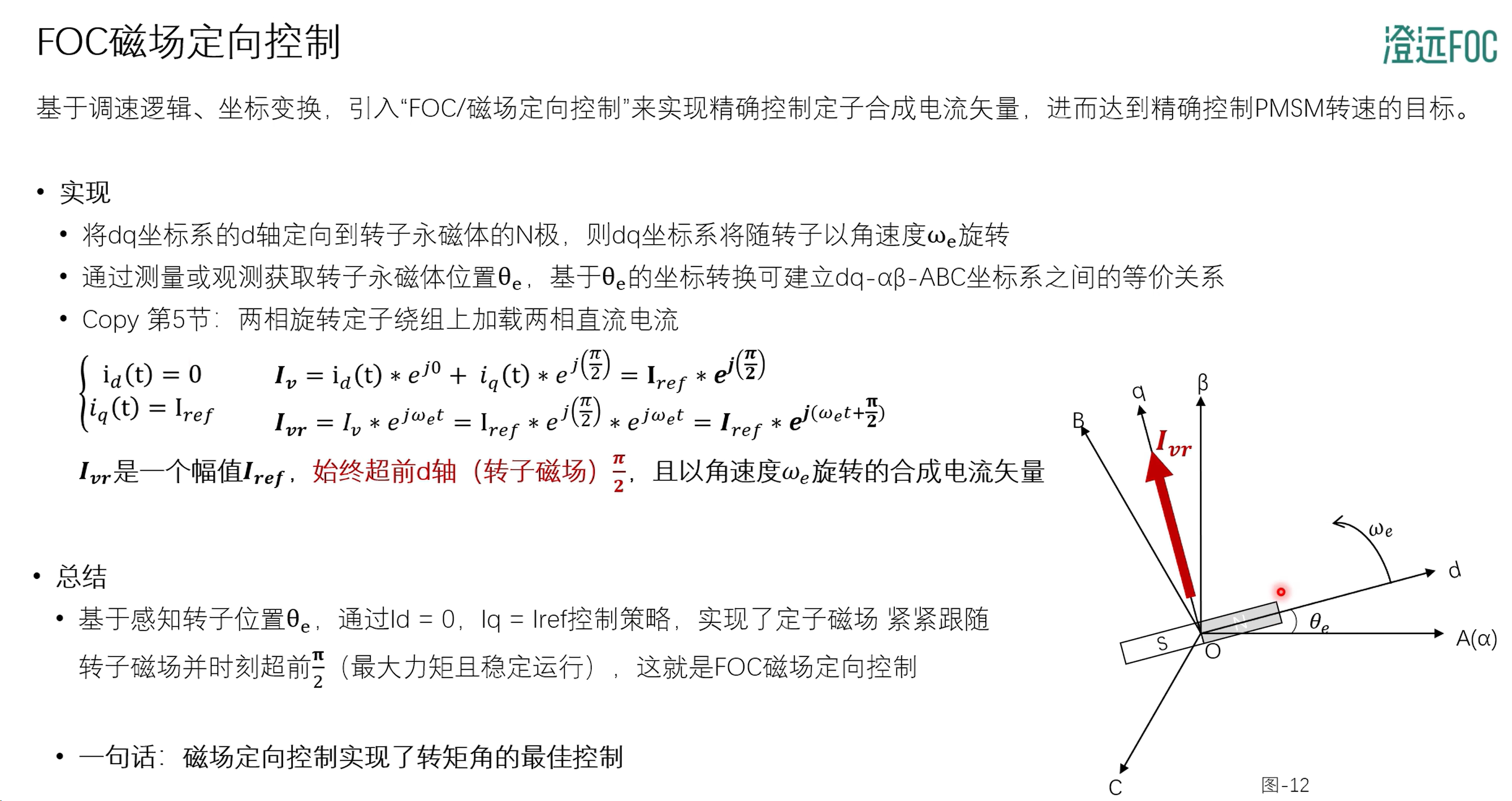
foc实现了转矩角的最佳控制,引入电流环来实现对定子电流大小的精确控制;
7、电机控制方式
市场上常见的控制逻辑为
1、开环强拖,闭环运行;
2、闭环启动,闭环运行;
闭环多为电流环加速度环和位置环加电流环,开环多为IF和VF强拖。
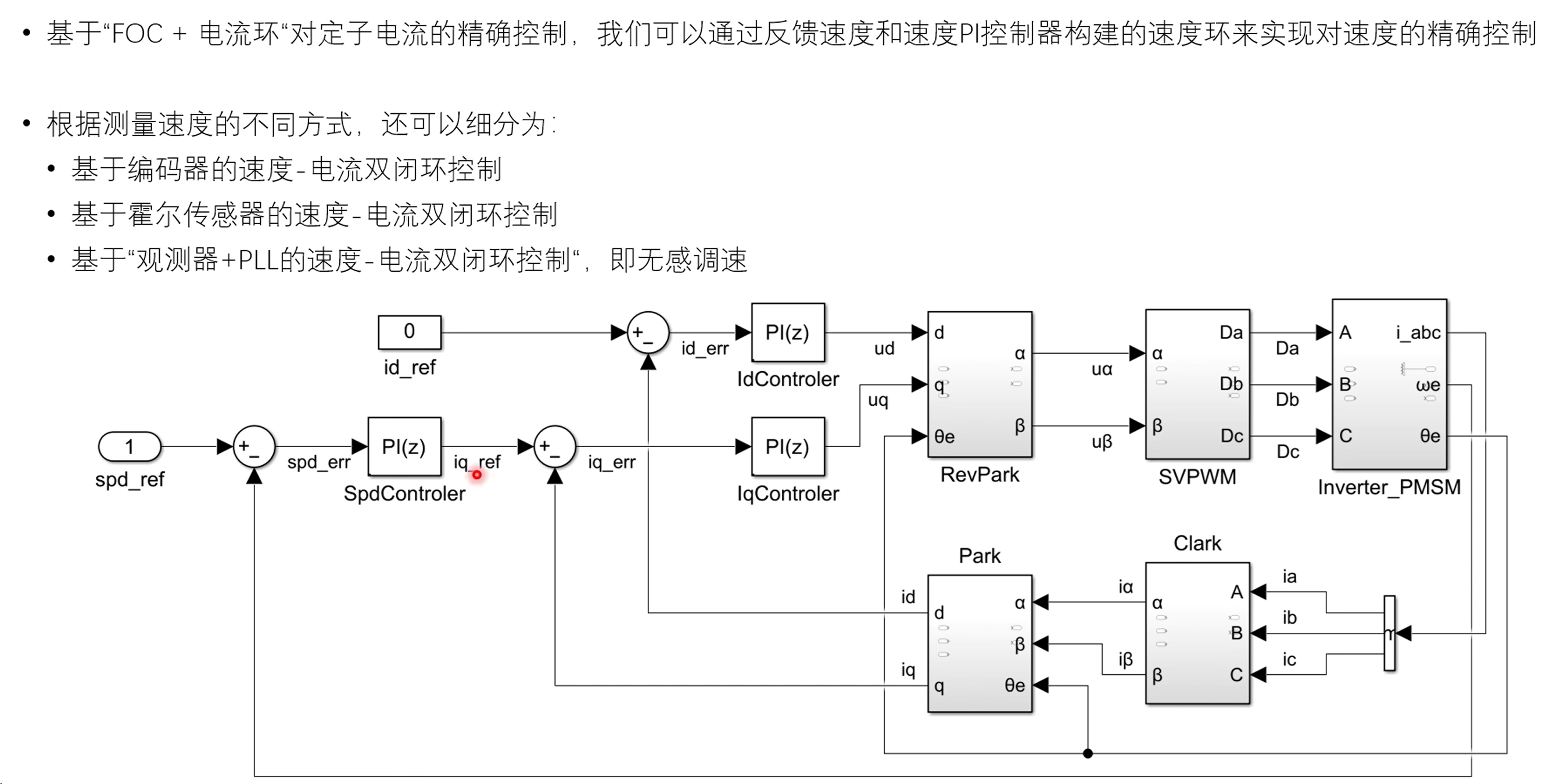
7.1速度——电流双闭环控制
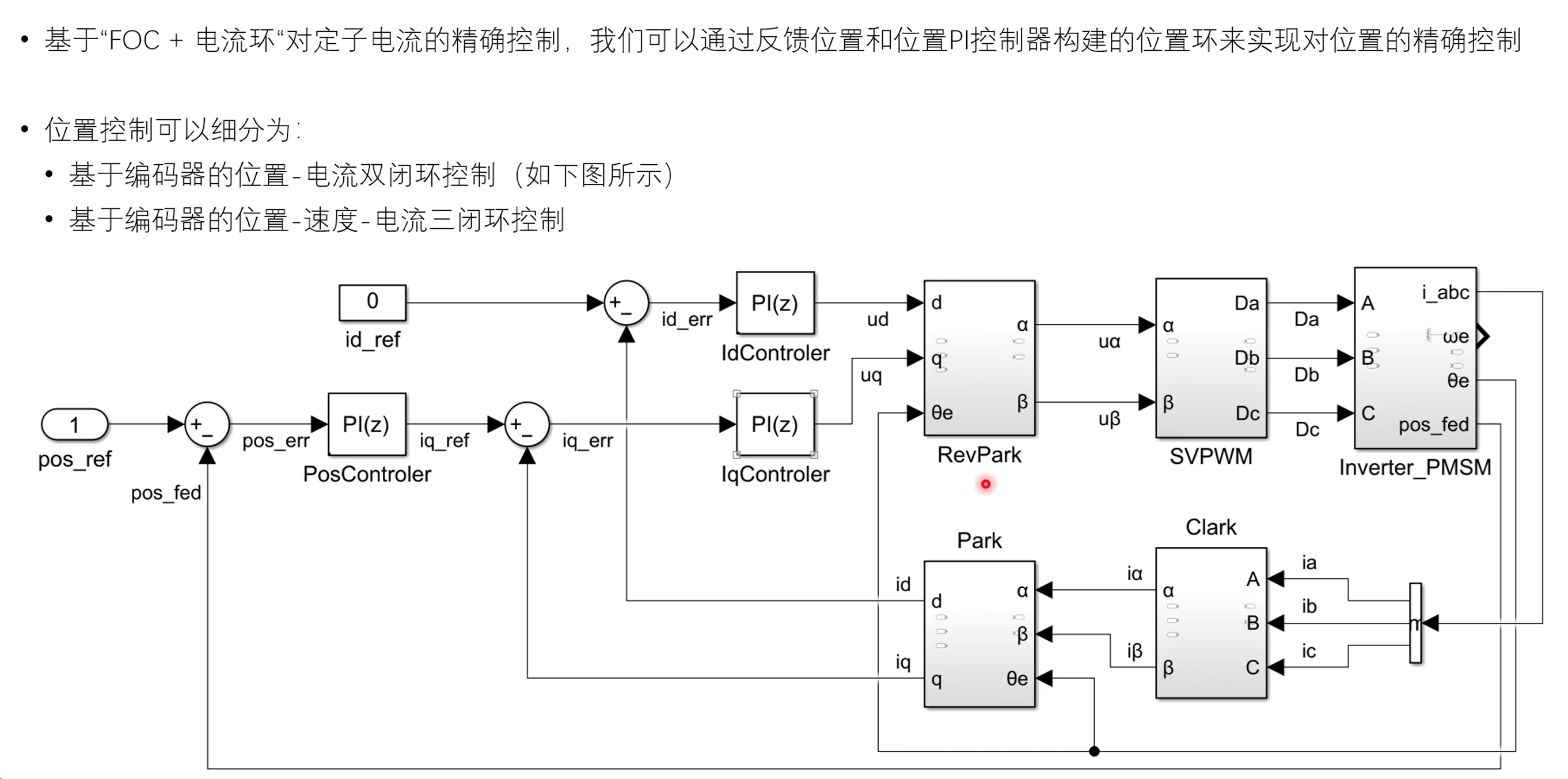
7.2位置——电流双闭环控制
7.3IF开环控制
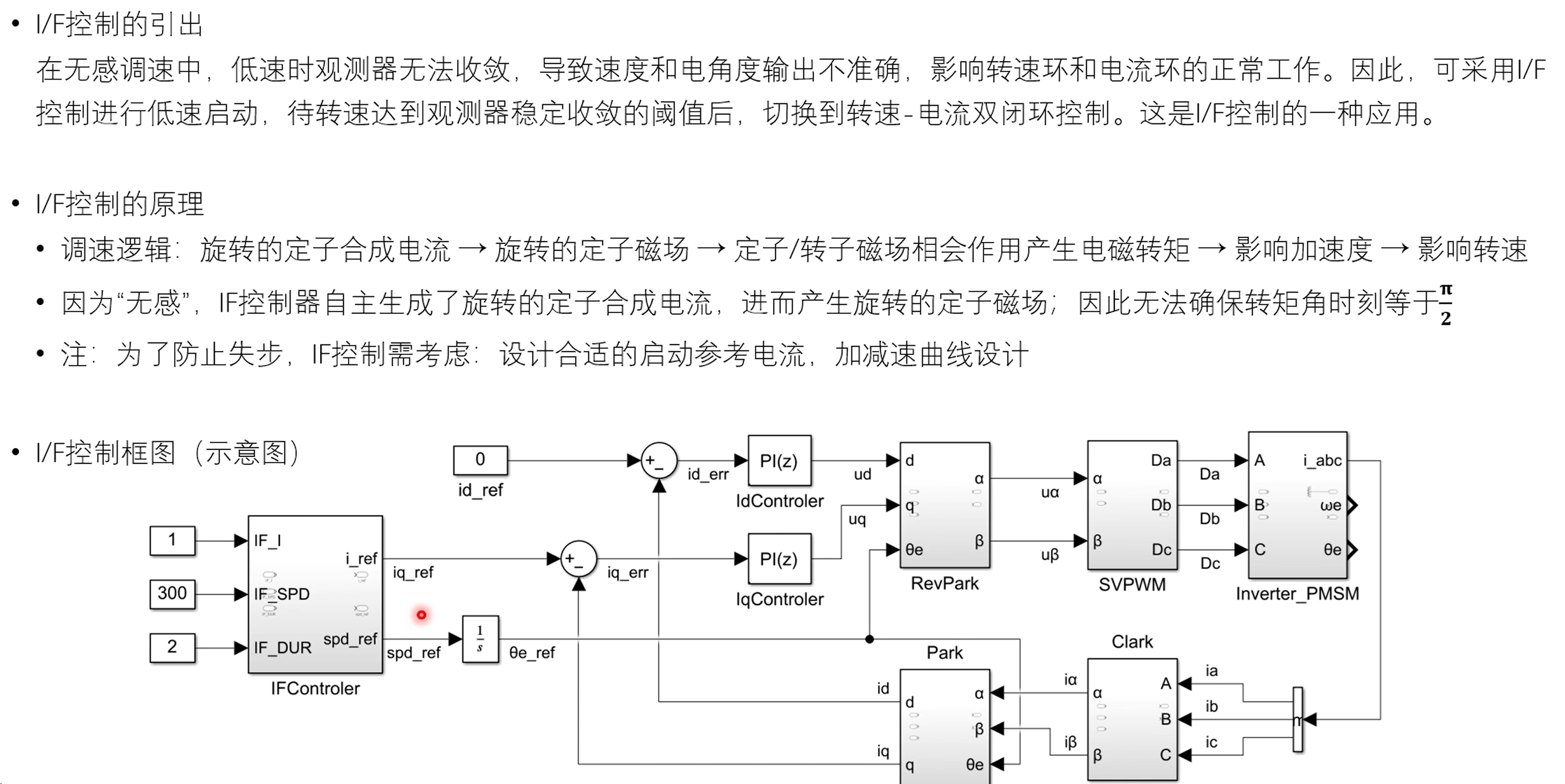
IFControler:输入电流、速度、时间,表示在2秒内速度从0转速线性增加到300转,电流从任意值线性增加到1A;
反PARK阶段的电角度是由IF生成的虚假的电角度,所以不能实现对转速的精确控制,只能实现电流的精准控制;
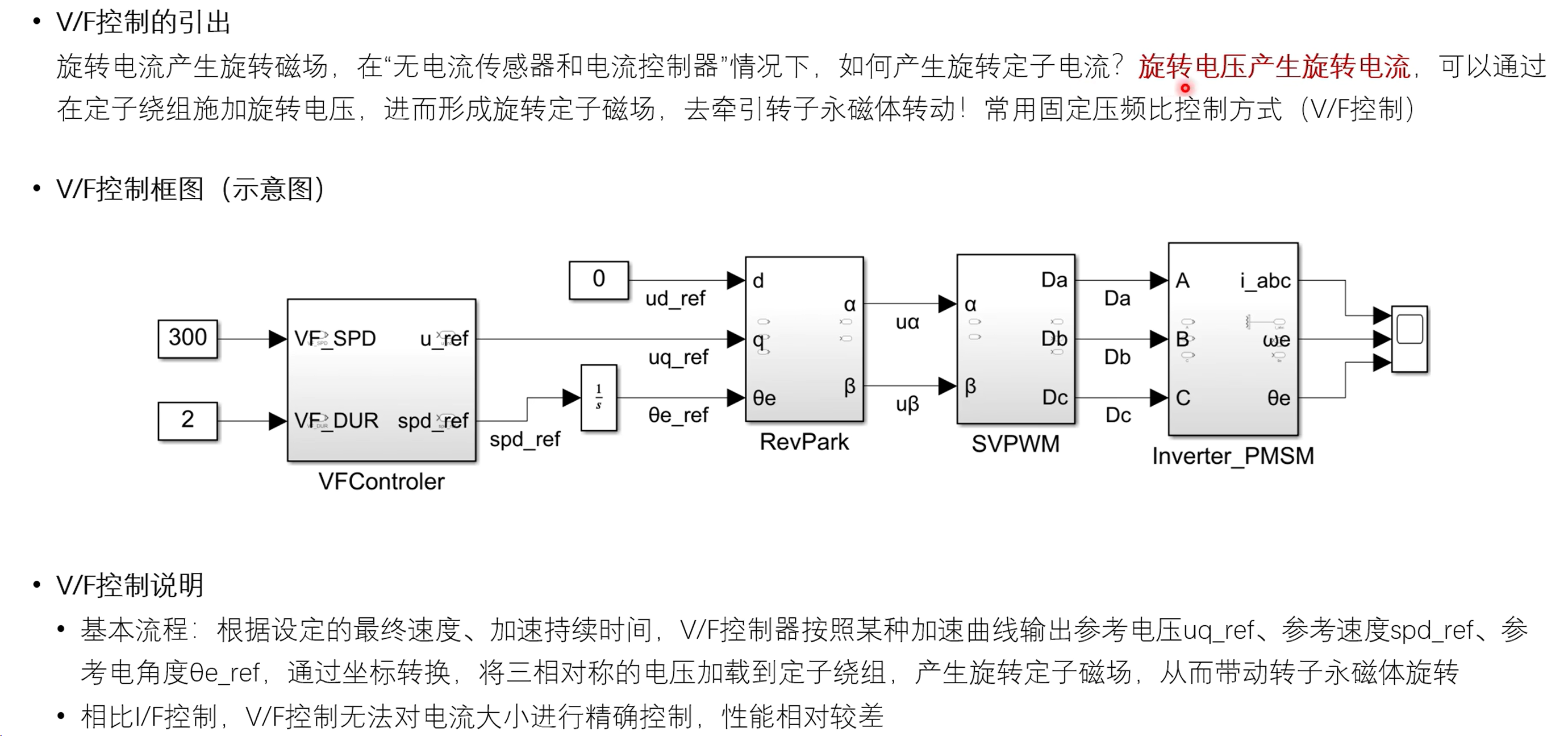
7.4VF开环控制

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 5
5 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)