峰岹 FU6532 无感FOC学习
峰岹 FU6532 无感FOC
前言
文章主要是我学习的过程,学到哪里记录到哪里,中间说错的会在后续的记录中修改,主要还是看看自己走过哪些弯路,哈哈哈。也不知道自己学习的方式对不对,就喜欢用到啥去看啥,老是觉得都看完了在来搞又不知道之前学的是什么。废话不多说,加油把他搞定。
资料
FAE给我的代码,硬件,调试手册;还有官网下载的参考;后续更新也会放在里面。百度网盘(提取码:1kku),文章中的图片和代码,如有侵权请联系删除。
一、硬件
硬件部分没啥好说的,有不理解的可以看一下峰岹官网FT8132的内容。这里先放着,后续遇到硬件问题即时记录。
二、软件
2.1 调试手册
先来看下调试手册里面的内容:
2.1.1 状态机流程图

总的电机运行流程就是mcSpeedRamp.FlagONOFF=1启动电机;mcSpeedRamp.FlagONOFF=0关闭电机;还有一个mcFault,故障处理。
2.1.2 程序流程图

这是整个代码包含的部分,while循环里的电机状态机就是2.1.1的内容。
2.1.3 调试步骤
先按照它的步骤调试一下吧,本来想直接看代码了。
1.电机参数
厂家提供了最好,我的电机没有参数,但是我有电桥,哇哈哈哈,我是该高兴呢还是该敲桌子呢(焯)。
1)极对数:4
极对数获取方法也很简单,扒拉电机转一圈,感受一下收到几次阻力除以2就是极对数了。或者呢电机条件允许的情况下,可以用一个示波器电压探头分别接入电机任意两相相线(探头接一根相线,地线接一根相线),然后手动转动转子一圈,示波器截取到电机旋转一圈的反电动势波形,波峰或波谷的个数即电机的极对数(这种方法也是用来测反电动势的)。还有一种方法是拿磁铁吸一圈,吸了几次就是几对极。
2)相电阻Rs:1.875Ω。
不知道精度有没有影响,直接用万用表测的线电阻,没用电桥。
3)相电感Ls:1.049mH。
电桥测:1000Hz;同时测后的时候转动下转子,看下电机是否为凸极性(不知道这个有没有影响,无感初始位置检测的时候凸极性和隐极性的定位方式不一样)
4)反电动势常数 Ke:
示波器的探头接电机的一相,地接电机另外两相中的某一相,转动负载,测出反电动势波形。取中间的一个正弦波,测量其峰峰值Vpp和频率f。

规格书上的计算应该也是这个公式的变形。算出来是4.3267,不知道对不对,问了下gpt常见的Ke。
注意参数填的时候里面是周期不是频率,单位是ms。基准速度刚调可以设置小一点,设置为额定值以下就行,防止出错占空比一下太大烧电机,我的额定是3000转,这里设置为4000(速度基准,后面最大转速是它的一半)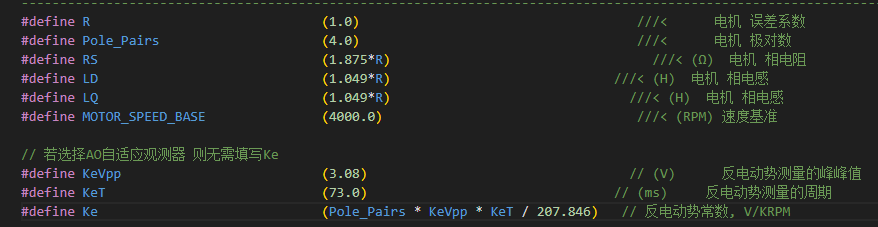
2. 芯片参数
我就改了PWM频率,10kHz,做有感方波的时候可以满足我的要求,这里就不变。
3. 母线电压上的电阻和采样电阻
母线电压采样可以先关了,之前做方波的时候遇到一个问题,直流源显示24V,但是我设置的24V报过压无法触发,要到24.3V。后来发现是输入的地方有个SS56有0.3V的一个压降,我的采样点在SS56的后面,这个压降加上就可以正常触发。
采样电阻要设置正确,这里会影响硬件过流。硬件过流是没法关闭的,过流之后会直接让ME=0;可以设置不让ME=0,只是进入中断,也不建议关掉,防止烧MOS。放大倍数要配合采样电阻设置。我有点忘记这个值应该如何确认了,下次看到的时候再补上。 我设置了0.01Ω,16倍放大(硬件过流为8A,软件过流为4A,方波的设置,软件过流会检测一段时间,硬件过流脉冲就会触发,我的PMOS是最大10A)。
4. 保护参数
刚开始调试,除硬件以外全关。
后续:没有后续,电机能动了 也不会按照它的代码写保护的,啊哈哈哈。
5. 启动参数配置
将AlignTestMode置为ALIGN_NOMAL,调速模式选择NONEMODE开机,这个时候电机会跑到预定位状态,此时UVW三相会有固定的PWM波形输出,则硬件驱动电路正常(#define IQ_Start_CURRENT I_Value(0.1) ///< (A) Q轴启动电流。这个也调小一点,不然要1A才会转动)。这样电机应该可以启动,我调试的时候是电流缓慢上升到0.26A,电机转动,不过速度上来之后,电流一下到了2A,直流源报过流(应该是切环的时候挂了,但是不知道是切入闭环还是切入硬件换相)。
2.1.4 小结
下面就是具体的环的参数调整,这个后面详细看了代码再说吧,这里的工作主要是确定硬件和采集的电机参数可以使用。我买了一块它的DEMO板,应为之前硬件设计上出了点问题,电机转一会儿就不动了,我就买了块对比了一下。这里做反电动势正好用来验证我的硬件设计对不对。
2.2 软件
软件我就按照程序流程图看吧,可能跳跃的会比较多,因为看着看着会走神,哇哈哈哈。
2.2.1 软件初始化
说到这个就刚开始看stm32的时候,那状态机,一套又一套。对于初学者是真的不友好,看的我真的是想吐,后面看了DengFOC,还好一点,不过他都是浮点数操作,对于我这2块的MCU真的是一言难尽。
代码具体也没啥。
偏置电压就设置成了中间值16383
正转
LED(不管它)。
McStaSet.SetMode = 0这个不知道干嘛的。
mcState:电机状态机设置为mcReady。
mcFaultSource:FaultNoSource。
2.2.2 硬件初始化
2.2.2.1 参考电压


参考电压5V;Vhalf是2.5V(这个设置是放大器的偏置电压,设置对之后,后面的偏置电压才会采集正确进入电机运行状态);使能VREF,VHALF。还配置了P3.2输出这个一定要开,不然没有偏置输出,P3.5输出Vref到P3.5脚,这里可以用示波器看下电压,它的输出有偏差。
2.2.2.2 硬件过流
CMP3_Init()和CMP3_Interrupt_Init()一起看,初始化里面他们只是配置了硬件过流。昨天看无感方波的时候看到他是用来做IPD初始位置检测了,所以本来是想详细看一下它的,这里面没有涉及就带过,等后面有机会再看方波的时候再说。
- 这里配置了P2.7(AD4),芯片FU6532上没有显示,其实这是内部引脚,它也是用来采集偏置电压的,之前在这里也是头疼了很久;
- 然后就是设置单比较器模式,15mV迟滞;
- 再配置DAC,把你设置的过流值转换成电压与AD4采集到的值比较;
- 配置触发硬件过流自动关闭MOE;
- 中断配置可有可无,给硬件过流标记位的。
2.2.2.3 ADC初始化
这个比较重要,FOC么,采集电流,无感换相。
- P2.0(AD0): 暂时不知
- P2.3(AD1): 暂时不知
- P2.4(AD2): 电压采集
- P2.5(AD3): SREF
- P2.7(AD4): 偏置电压
- P3.3(AD6): 温度采集
- P3.4(AD7): CM3P,AMP0的输出会到这里
这里SetBit(ADC_MASK, 0x3000);使能了CH13、CH14?有点不懂。ADC_SCYCH = 0011 0011,AD2、8~13采样周期为3;SetBit(ADC_CR , ADCALIGN),这个比较巧妙,直接把adc的采样值左移了3位;4096*8 = 32768,相当于归一化到了Q15。
(2025.10.23,先到这。)
2.2.2.4 Driver初始化
之前做有感的时候梳理过Driver也没记录,就是现在有点忘记了,好记性不如烂笔头。
- DRV_ARR = 4800;f = 48M/DRV_ARR,我需要10kHz的PWM波
- DRV_DTR :死区设置,FOC需要设置互补输出,没死区它的上管下管容易在上升下降过程中导通。详细的值需要看MOS的规格书,看导通关闭时间。资料这里讲的挺好的,gpt的回答也类似,就参考这里吧。
- DRV_DR:这个就是我们需要多少占空比=DRV_DR/DRV_ARR*100%
- DRV_CMR = 1010 1011 1111;UVW上下管输出使能,上管反向输出。
- PI_CR:对于FU6532,他是内置预驱的,都是高电平驱动输出。
- 中断配置:PWM中心触发中断(DRV_COMR = (PWM_VALUE_LOAD >> 3);匹配点对应的占空比 = DRV_COMR4/DRV_ARR100% )。
- DRV_CR:FOC不使能(这个后面运行过程中还会处理);ME工作在FOC驱动模式;Driver使能,计数器使能;预装载不使能(就是更新PWM占空比之后立即写入寄存器)
2.2.2.5 运放初始化

从图上可以看出,只要配置P3.0,P3.1;P2.7为模拟模式;这里AMP_CR0|=(1<<6);代码注释是恒功率,就是把母线电压经过放大器输出到P3.4引脚,这个引脚又是CMP3的正端输入,防止过流的。
过流值这个
这个是FT8132里面的描述,我的要求是2A的额定,按照采样电阻0.01Ω,我的最大采样电流是31.25A,完全满足我的要求。
2.2.2.6 其他
对于时钟初始化这里,1ms的定时处理,没啥好说的。
这里加了个看门狗,之前没遇到,等之后再来看吧,一般都是防死机。
2.2.3 偏置电压采样
这三行代码实现了一个滑动平均滤波的零点偏移校正,相当的哇塞。
mcCurOffset.Iw_busOffsetSum += ((ADC4_DR & 0x7ff8));
mcCurOffset.Iw_busOffset = mcCurOffset.Iw_busOffsetSum >> 4;
mcCurOffset.Iw_busOffsetSum -= mcCurOffset.Iw_busOffset;

这是算法的等价公式,采样1000次,保证采样值在2.5±5%内。如果不在范围内,这里会报错,后续程序是无法运行的。还有就是如果不出意外,偏置电压采样的时候Iw_busOffset和IbusOffset应该是一样的。 从下图调试结果来看,还是有细微差别的。
2.3 电机控制
2.2.4打的太烦了,直接重开一章,哈哈哈,写博客就是爽,想咋写就咋写。这部分内容也比较多,会把中断部分也插在里面写,整体按照状态机的转移来看,还有就是无感启动的算法学习。
2.3.1 mcReady
if (SPEED_MODE == NONEMODE)
{
isCtrlPowOn = true; // 开机
#if (MOTOR_CTRL_MODE == SPEED_LOOP_CONTROL)
{
mcFocCtrl.Ref = MOTOR_SPEED_MIN_RPM;
}
}
前面SPEED_MODE设置了NONEMODE,也就是上电运行;这里有个电流校准标记位,MOE=0,不使能FOC,开启了AD4和AD2。从上面看到现在,这里应该是不用处理的,不过可能是为了停机再启动;然后就是有判断是否故障,若是没有故障就等待启动标记和偏置电压采集合适,就进入mcInit。
2.3.2 mcInit
#if ( Shunt_Resistor_Mode == Single_Resistor)
{
ClrBit(ADC_MASK, CH4EN ); // 关闭软件电流采样的ADC FOC模块会自动调用相应ADC 无需外部使能
}
这里注释写的FOC模块会自动调用相应ADC 无需外部使能感觉比较重要,先贴这里;下面参数初始化,PI1\2\3分别表示速度、电流、功率环的PI参数设置;30ms的一个预充电,进入mcCharge。
mcCharge放一起吧,就是下三桥轮流充电,芯片里面有预驱,最好执行一下,我的只要24V,其实也不是很必要;预驱完了就是设置预定位角度和时间,然后进入mcAlign。
顺逆风先不看,先实现转起来再说。他提供了两种方式的顺逆风检测,后面可以学习一下。
2.3.3 mcAlign
这一步是定位,强拉到指定角度。先不探究原理,从代码上看,他是对FOC的寄存器进行配置,先看下它的寄存器。这里我之前也没看,要详细记录下,比较长。
2.3.3.1 FOC规格书简看

FOC 模块包含角度估算器,PI 控制器,坐标转换模块,电流采样模块和 PWM波形输出模块,可硬件实现电流闭环。角度估算器利用电机电流信号估算转子位置,实现基于无感 FOC 的电机控制。也可通过MCU处理位置传感器信号获取转子位置,实现基于有感FOC的电机控制。(唉,之前学的算啥哦,这里硬件都集成了,调个参数就结束了,生活不易,猫猫叹气)。下面写的和规格书一起看。
- SetBit(DRV_CR, FOCEN);就可以打开FOC模块。
- 参考输入:Iq_ref由电流环和速度环一起确定;Id_ref一般为0;具体FOC讲解可以参考这篇博客。
- PI控制:iq、id分别与自己的ref进行PI运算求出Uq、Ud
- Park逆变换:Uq、Ud加当前的电角度,从两相旋转d-q坐标系变换到两相静止α-β坐标系。
- Clarke 变换:采样到的A相电流和B相电流从三相静止A-B-C坐标系变换到两相静止α-β坐标系。
- Park 变换:将采样电流从两相静止 α-β 坐标系变换到两相旋转 d-q坐标系,获得 d-q轴反馈电流Id和Iq。
- SPWM:通过两个相邻矢量的和,可表示任意矢量六边形内的空间电压矢量。这里就已经可以输出正弦波了。
- 七段、五段式SVPWM:上面已经正弦了,这里还要七段式干嘛。正弦波的上下峰利用率太低,通过平移波形提高效率,(好像是提高了13.4%,这里有点不清楚,感兴趣可以看下dengFOC的视频,有基础FOC算法讲解)
- 电流电压采样(单双电阻采样的原理参考)
1) 单电阻采样(感觉上面的博客写的偏重于要扩大采样间距,问了GPT,它说的还不错,内容保存在这里)
2) 双电阻采样(这就是用了KCL公式,测两个求另一个) - 电流偏置:初始化执行的电流偏置采样,完成后会写入
FOC_CSO寄存器。 - 角度模式:暂时还没看出来用的那种,先不看,只知道是强拖电机到固定角度之后启动的。
- 电机参数
2.3.3.2 FOC初始化
FOC寄存器较多,还是有必要要一点一点看过去的,我把他和代码的一个解析放在这个博客里。(写完这里的博客之后,发现还是不要一点点看过去了,用到那个看那个就可以了,太多了,过一遍有点映像就行,大部分都是参数)。
最后整体过一下它初始化的步骤:
1)互补使能(这个前面DRV_INIT里有了)
2)使能FOC:
关闭Drviver计时器;打开FOC;滑膜算法的最大误差选择;速度滤波系数
3) 配置FOC寄存器
清零FOC_CR1、FOC_CR2、Id、Iq、角度、爬坡函数的初始加速度、爬坡速度、爬坡次数、启动补偿角度、开环切闭环平滑过渡窗口大小。
4)电流环参数配置
5)位置估算参数配置
6)AO/PLL/SMO
角度估算器模式选择SMO;SMO的滑膜增益值;SMO的最小速度;禁止FOC__EALP/FOC__EBET自动计算;自适应观测器使能
7)FOC_FBASE(估算器的频率基准设定值)
它定义了转速估算与控制算法时间基准之间的比例关系。
F O C _ F B A S E = f b a s e ∗ T s ∗ 32768 FOC\_FBASE = fbase*Ts*32768 FOC_FBASE=fbase∗Ts∗32768
f_base:基准频率(Hz);T_s:控制周期(即 PWM 周期)。
#define SAMP_FREQ (10.0 * 1000)
#define TPWM_VALUE (1.0 / SAMP_FREQ)
#define Pole_Pairs (4.0)
#define BASE_FREQ ((MOTOR_SPEED_BASE / 60) * Pole_Pairs)
#define MOTOR_SPEED_BASE (4000.0)
#define OBS_FBASE _Q15(BASE_FREQ*TPWM_VALUE) // 计算值是:874。基准转速4000,4对极。
FOC_FBASE 告诉估算器:“当电机达到基准速度时(BASE_FREQ Hz),每个控制周期的角度增量是多少。”
8)FOC_OMEKLPF(估算器估算速度的低通滤波系数)
一阶离散低通滤波公式:
ω f i l t e r e d ( k ) = ω f i l t e r e d ( k − 1 ) + K L P F × ( ω e s t ( k ) − ω f i l t e r e d ( k − 1 ) ) ω_{filtered}(k) = ω_{filtered}(k-1) + K_{LPF} \times (ω_{est}(k) - ω_{filtered}(k-1)) ωfiltered(k)=ωfiltered(k−1)+KLPF×(ωest(k)−ωfiltered(k−1))
其中 K L P F K_{LPF} KLPF 就是 FOC_OMEKLPF 对应的系数。
9)FOC_TGLI(小PWM脉冲消除)
10)SVPWM模式设置
11)对于FOC模式,正反转的时候需要通过DRV_CR中DDIR进行控制
12)过调制使能。
13)单电阻采样配置
单电阻模式;采样时刻延迟配置;7段式SVPWM;电流采样最小窗口(采样时间+死区)设置;
14)电流偏置校准
校准itrip和ic;写入偏置
15)使能DRV计数器并设置DRV的比较值来源于FOC模块。
FOC_Init()的内容到这里就结束了,花的时间有点久了,感觉还没到看算法的地方都用了挺久的时间。不过不要心急,后面算法不理解也没关系,不理解算法不会影响电机转动的,哈哈哈哈。
2.3.3.3 FOC预定位配置
这里就是配置预定位的电流、KP、KI
1)配置 I D R E F = 0 IDREF = 0 IDREF=0 和 I Q R E F = 2 A IQREF = 2A IQREF=2A(这里2A太大了吧,空载应该0.5A差不多,刚调试的时候。这个值是我猜的,不知道对不对。)
2)D和Q的PI参数
3)估算器的PI
4)起始角度设置:这里设置的预定位角度是-30°;设置初始估算器的角度输出为-30°。
5)使能DRV输出,开始找初始角。
程序设定了500ms来找初始角,时间到了之后就会进入静止启动配置函数。
ps:自写代码调试
- 一开始的时候死活没有电流输出,后面检查了Driver配置,没有选择FOC源输出给driver_out;第二个问题是预定位的IQ_REF没有Q15转换(PID的目标都没有怎么会有输出呢,自己写的代码一定要自己仔细看)。
- 调试的时候嗡鸣声音比较大。这个问题其实就是设置了IQ_REF,FOC中IQ控制的是力矩(会产生周期性的电磁力变化,就会出现嗡鸣),ID控制的是磁场(产生恒定的吸附力)。所以改成设置ID_REF的值就可以解决这个问题。
- 对于2中设置的ID值,设置0.5A时出现了启动缓慢的问题,可以设置IQ值为0.1,给较小Q轴电流,可以加快电机启动且预定位不会发出声响。
2.3.3.4 静止启动配置
1)刚刚预定位配置过D和Q、KP、KI。这里重新给它初始化一下,进入接下来的启动配置。
2)这里的MOE在FOC初始化之后就打开了,不是应该配置好了之后再开么。MOE是控制PWM输出的,开关它就可以实现PWM的输出与否。
3)配置启动的 I D R E F = 0 IDREF = 0 IDREF=0 和 I Q R E F = 0.1 A IQREF = 0.1A IQREF=0.1A。这里是我改了这个IQREF值,原始值我忘记了,好像也是2A,太大了我的直流源报过流了,改小之后可以正常启动,但是还是没有能进去速度环,应该还有问题,先往下面看。
4)D和Q的PI参数:D的无所谓,IDref都是0,目标值都没有就不用管PI了。Q的设置是P是0.5,I是0.02。
5)估算器的PI
6)启动方式选择:Omega_Start。
这里应该先来说一下Omega_Start,内容较多放个博客里。这里有一篇博客对他简单介绍并调试了,可以借鉴一下。
看完这两篇博客回来应该也就知道这里需要配置什么了。FOC_EFREQACC为Omega的增量;FOC_EFREQMIN为Omega的启动判断转速;FOC_EFREQHOLD为Omega的限制转速;再配置FOC_CR1中使能估算器强制角度和估算器模式。
7)mcFocCtrl.State_Count:设置Omega的启动时间1500ms,时间到了之后进入mcRun。
8)设置Q轴启动电流;这里设置这个电流值应该也可以控制电机启停,所以ME=1在前面应该是没事的。
——————
到这里我设置了FOC_EFREQHOLD为500,启动时间为20s后,速度先上升随后停止,应该就是强拖速度到了500,但是估算器输出速度为0,没有进入FOC闭环,先不着急解决,接下来看一下估算器是如何计算速度的。
mcFocCtrl.SpeedFlt = LPFFunction(FOC__EOME, mcFocCtrl.SpeedFlt, 90);
这里是一个对FOC__EOME低通滤波之后的速度值,那这里的速度就是估算器直接输出的(内部不可见)。
然后我就调试了一下:
调试上来看,速度已经到了300转,电机状态机也正常到了运行状态,说明问题不是在omega启动这里了,图上可以看到,ADCCurrent的值是0,这不是不是意味着是电流采样的问题。
2.3.3.5 电流采样相关代码
代码在DRV中断中。
从上图中,看到Power_Currt的采样值是22。根据电流公式计算
得到当前母线电流是0.1678A。
不过这里有个疑问,中断里没有触发adc采样,只是等待ADC忙状态结束,在1ms的系统时钟里面是有adc采样开始的。
看了规格书里面对单电阻采样的描述,是在配置了单电阻模式之后,会在4个采样点对母线电流进行采样。所以这里也是不可见的。
这一部分代码就是采样,减去偏置,滤波。后面就把这个值送去算功率了。
算了,先不纠结,往下看。
2.3.4 mcRun
2.3.4.1 速度环
调试之后确定是速度环切入闭环的时候,电流增大,但是转速没有多少变化。先看一下速度环的代码。
- 速度没有超过MOTOR_LOOP_RPM,先做软化电流。
else
{
mcFocCtrl.Mode0HoldCnt = 0;
mcFocCtrl.IqRef = FOC_IQREF; //启动未切环前进行软化电流处理
if(mcFocCtrl.IqRef + IQ_Start_CURRENT_ACC < IQ_Start_CURRENT_END)
{
mcFocCtrl.IqRef += IQ_Start_CURRENT_ACC;
}
else if(mcFocCtrl.IqRef - IQ_Start_CURRENT_ACC > IQ_Start_CURRENT_END)
{
mcFocCtrl.IqRef -= IQ_Start_CURRENT_ACC;
}
else
{
mcFocCtrl.IqRef = IQ_Start_CURRENT_END;
}
FOC_IQREF = mcFocCtrl.IqRef;
}
开环电流启动,从0.1A每1ms加0.01A,最大到0.5A。
- 速度达到设定值,进入闭环配置
if (mcFocCtrl.SpeedFlt > MOTOR_LOOP_RPM)
{
mcFocCtrl.Mode0HoldCnt++;
if (mcFocCtrl.Mode0HoldCnt > 1)
{
FOC_THECOMP = RunThetaComp; // 切环时刻,运行角度补正
mcFocCtrl.mcFOC_THECOMP = RunThetaComp;
mcFocCtrl.CtrlMode = 1;
FOC_QKP = QKP;
FOC_QKI = QKI;
FOC_DKP = DKP;
FOC_DKI = DKI;
ClrBit(FOC_CR2, UDD);
// 启动电流环与外环给定衔接
#if (MOTOR_CTRL_MODE == SPEED_LOOP_CONTROL)
{
if (mcFocCtrl.Start_Mode == TAILWIND_START)
{
mcRefRamp.OutValue_float = mcBemf.BEMFSpeed;
}
else
{
mcRefRamp.OutValue_float = mcFocCtrl.SpeedFlt;
}
}
#elif (MOTOR_CTRL_MODE == POWER_LOOP_CONTROL)
{
mcRefRamp.OutValue_float = mcFocCtrl.PowerFlt;
}
#elif (MOTOR_CTRL_MODE == UQ_LOOP_CONTROL)
{
mcRefRamp.OutValue_float = mcFocCtrl.UqFlt;
}
#endif
//
mcFocCtrl.LoopTime = LOOP_TIME;
mcRefRamp.IncValue = RAMP_INC;
mcRefRamp.DecValue = RAMP_DEC;
mcFocCtrl.IqRef = FOC_IQREF;
FOC_IDREF = ID_RUN_CURRENT; // D轴启动电流
PI1_UKH = mcFocCtrl.IqRef;
}
}
上面就是大致参数配置,基本没啥改动。结果发现自己蠢了,前面采集电机参数的时候,代码上的电感是H,不是mH,修改之后就可以正常运行。
修改:
#define DKP _Q12(0.01)
#define SKP _Q12(0.05)
#define SOUTMAX I_Value(1.0)
#define Motor_Max_ADCCurrentbus I_Value(2.0)
- 速度闭环
case 1:
{
if(mcFocCtrl.mcFOC_THECOMP + 1 < RunThetaComp_2) // 让角度补偿FOC_THECOMP逐步逼近目标补偿RunThetaComp_2
{
mcFocCtrl.mcFOC_THECOMP += 1;
}else if(mcFocCtrl.mcFOC_THECOMP - 1> RunThetaComp_2)
{
mcFocCtrl.mcFOC_THECOMP -= 1;
}
else
{
mcFocCtrl.mcFOC_THECOMP = RunThetaComp_2;
}
FOC_THECOMP = mcFocCtrl.mcFOC_THECOMP; //切环后进行角度校准(可重写对速度进行角度补偿,增加低速力矩,但空载时效率降低)
mcFocCtrl.LoopTime++;
if (mcFocCtrl.LoopTime >= LOOP_TIME)
{
mcFocCtrl.LoopTime = 0;
refRampOut = Motor_Ramp(mcFocCtrl.Ref); // 控制命令爬坡函数,用于实现调速信号之间平滑过渡
#if (MOTOR_CTRL_MODE == CURRENT_LOOP_CONTROL)
{
mcFocCtrl.IqRef = refRampOut;
FOC_IQREF = mcFocCtrl.IqRef;
}
#elif (MOTOR_CTRL_MODE == SPEED_LOOP_CONTROL)
{
mcFocCtrl.IqSpeedRef = HW_One_PI(refRampOut - mcFocCtrl.SpeedFlt);
mcFocCtrl.IqRef = mcFocCtrl.IqSpeedRef;
FOC_IQREF = mcFocCtrl.IqRef;
}
#elif (MOTOR_CTRL_MODE == POWER_LOOP_CONTROL)
{
#if (OverSpeedLimitEnable)//限速
{
PI1_UKMAX= HW_One_PI2(MOTOR_SPEED_LIMIT_RPM - mcFocCtrl.SpeedFlt);
}
#endif
mcFocCtrl.IqRef = HW_One_PI(refRampOut - mcFocCtrl.PowerFlt);
#if (Weak_MagneticEn)
Weak_Magnetic();
#else
FOC_IQREF = mcFocCtrl.IqRef;
#endif
}
#elif (MOTOR_CTRL_MODE == UQ_LOOP_CONTROL)
{
mcFocCtrl.IqRef = HW_One_PI(refRampOut - mcFocCtrl.UqFlt);
FOC_IQREF = mcFocCtrl.IqRef;
}
#endif
}
}
break;
代码解析:
第一部分就是让角度补偿FOC_THECOMP逐步逼近目标补偿RunThetaComp_2;
第二部分是爬坡函数refRampOut = Motor_Ramp(mcFocCtrl.Ref);代码中并不是直接把当前速度与目标速度进行PID运算的,而是先判断当前转速和目标值的关系,这样就避免了PI处理突变输入,比如说0转到2000转,PI输出直接让Iqref的值变成了10(假设限制为10),就会一下子输出最大电压,电机工作不平滑。
第三部分就是速度环的PI输出Iqref。
2.4 总结
到这里代码基本上就结束了,参数还要细调。
看完之后本来是想着以看代码的方式来学习一下FOC的,但峰岹的FOC实现都在MC内核中,并没有对我的学习有什么太大的帮助。只能说适合做产品,加快了开发过程,个人方面有点遗憾。
至于还有其他的功率环、电流环、各种启动方式等后面会直接补充进每个章节里。
修改记录
2025.10.29 完稿
2025.11.04 添加预定位调试

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐


 19
19 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)