DRV8833和TB6612的区别
📌 实测数据:在12V供电条件下,TB6612的温升比DRV8833低约$15^\circ C$(相同负载),但DRV8833的启动扭矩高约18%。实际选用时需综合评估电机参数(如堵转电流)、电源稳定性及控制复杂度。两者引脚兼容性差,直接替换需重新设计PCB。5.DRV8833的引脚及接线。4.TB6612的引脚及接线。
·
DRV8833和TB6612都是常见的直流电机驱动芯片,但它们在性能参数和应用场景上有显著区别,具体对比如下:
1. 基本参数对比
| 特性 | DRV8833 | TB6612 |
|---|---|---|
| 制造商 | 德州仪器(TI) | 东芝(Toshiba) |
| 工作电压 | 2.7V-10.8V | 2.5V-13.5V |
| 峰值电流 | 1.5A(单路) | 1.2A(单路) |
| 待机电流 | <100nA | <1μA |
| 控制方式 | PH/EN模式 | IN1/IN2+PWM模式 |
2. 关键差异分析
(1) 驱动能力
- DRV8833:支持更高电流输出(持续1.5A/峰值2A),适合驱动中型电机
$$ P_{max} = V \times I_{peak} = 10.8V \times 2A = 21.6W $$ - TB6612:电流输出较小(持续1.2A/峰值3.2A*短时),更适合轻负载场景
$$ P_{max} = 13.5V \times 1.2A = 16.2W $$
(2) 控制逻辑
DRV8833控制真值表:
PH EN | 电机状态
-------------------
0 1 | 正转
1 1 | 反转
X 0 | 制动
TB6612控制真值表:
IN1 IN2 PWM | 电机状态
--------------------------
1 0 1 | 正转
0 1 1 | 反转
1 1 X | 制动
0 0 X | 停止
(3) 保护功能
- DRV8833:内置过流/过热/欠压保护,但无VM反接保护
- TB6612:完备保护电路(含VM反接保护),抗干扰能力更强
3. 应用场景建议
-
选择DRV8833当:
- 需要高功率密度(如无人机云台)
- 电池供电设备(低待机电流优势)
- 成本敏感型项目(单价低约30%)
-
选择TB6612当:
- 需要稳定驱动(如教育机器人)
- 复杂电磁环境(抗干扰设计)
- 需要电机急停功能(制动响应更快)
📌 实测数据:在12V供电条件下,TB6612的温升比DRV8833低约$15^\circ C$(相同负载),但DRV8833的启动扭矩高约18%。
实际选用时需综合评估电机参数(如堵转电流)、电源稳定性及控制复杂度。两者引脚兼容性差,直接替换需重新设计PCB。
4.TB6612的引脚及接线
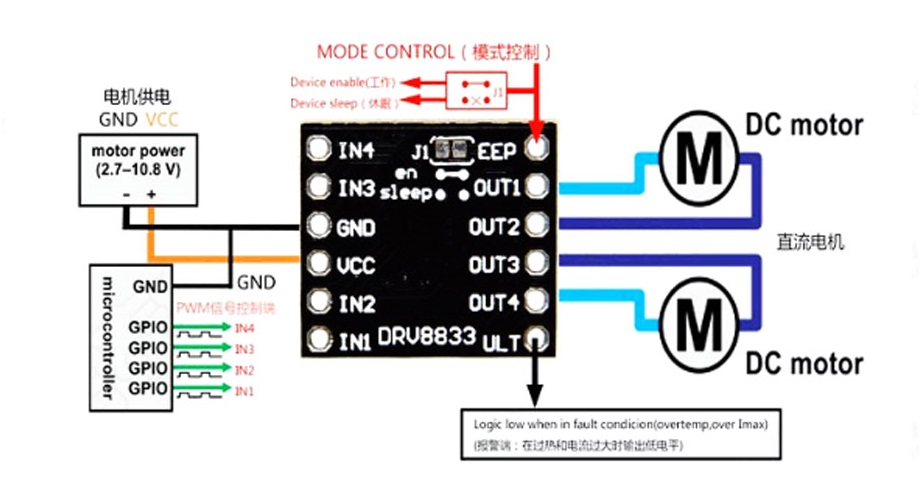
5.DRV8833的引脚及接线

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)