无感FOC中的Omega启动
Omega启动
前言
最近在看峰岹的无感FOC代码,里面涉及到Omega启动,记录一下。这篇博客也有对他的调试。
还是先看下GPT的解释,现在GPT太强了,查东西很方便,解释的也很清除。
Omega Start 是什么
Omega Start 是一种在无位置传感器(sensorless)模式下启动电机的方法,特别用于无感控制(sensorless FOC)系统中。
它通常用于起步时提供平滑的启动过程,并避免因估算误差导致电机不稳定或无法启动。
📋 1. 作用
Omega Start 主要用于以下几个方面:
-
平滑启动:当电机从静止状态开始转动时,特别是在低速下,电机的转子角度可能并没有精确的估算。Omega Start 通过在启动初期使用低速(通常是“平滑启动”)来避免由于角度估算误差而造成的抖动或异常行为。
-
无位置传感器模式:在没有位置传感器(如霍尔传感器或编码器)的情况下,电机的角度估算是通过电动势(EMF)反推的,而这些估算在电机启动时可能并不稳定。Omega Start 通过预设的角度控制策略,帮助电机平稳地从零转速起步。
-
起步保护:电机通常在低速或静止时难以通过传统的开环控制实现精确的角度估算。Omega Start 利用一些特殊的控制方法,如开环速度控制或增加起步扭矩,来确保电机能够稳定启动并过渡到闭环控制(FOC)。
-
扭矩补偿:为了避免转子角度估算误差,Omega Start 可能会使用扭矩补偿技术,在启动过程中提供额外的帮助,确保电机的启动平稳,并能适时切换到正常的闭环估算模式。
📐 2.工作过程
一般来说,Omega Start 过程通常包括以下步骤:
-
低速开环启动:电机在初始阶段以较低的固定速度启动,通常不需要精确的角度估算。系统会使用一些预设的转速控制策略。
-
角度估算过渡:随着电机的转速逐渐增加,系统开始逐步估算转子角度。这时电机进入一个过渡阶段,角度估算会逐渐变得精确。
-
切换到闭环控制(FOC):当电机转速足够高时,系统会切换到闭环控制模式,精确控制转子角度,实现高效的磁场定向控制(FOC)。
🧮 3. 在无感控制中的重要性
无感控制依赖于估算器来计算电机的转子角度,在启动时,由于转速为零,反电动势(EMF)为零,系统难以直接估算准确的转子角度。这时,Omega Start 起到了一个重要作用,通过在启动阶段提供合适的控制方法来确保电机能够顺利启动。
- 启动时低速控制:在启动阶段通过低速稳定运行,可以避免由于估算角度不准造成的突变。
- 避免卡机现象:如果没有类似 Omega Start 这样的启动策略,电机可能会因转子角度估算错误而导致无法启动或停止。
✅ 4. 总结
- Omega Start 是用于 无感启动模式 的一种技术,目的是确保电机能够平稳启动并避免由于估算误差而引起的转速不稳定。
- 它通过使用低速开环启动、角度估算过渡和最终的闭环控制切换来确保电机的稳定运行。
- 适用于 无位置传感器(sensorless) 的 FOC 控制系统,避免电机在起步阶段出现问题。
如果你正在设计或调试一个无位置传感器的电机控制系统,Omega Start 会是一个非常重要的功能,它保证了启动时的平滑性和系统稳定性。
峰岹调试手册
手册里的描述:
当估算器的估算速度OMEGA小于用户设定的最小值FOC_EFREQMIN(对应MOTOR_OMEGA_RAMP_MIN参数),强制速度从0开始,每个运算周期与速度增量FOC_EFREQACC(Motor_Omega_Ramp_ACC参数)相加,同时根据FOC_EFREQHOLD(MOTOR_OMEGA_RAMP_END 参数)进行最大值限幅,输出强制速度作为最终速度EOME供角度计算模块算出估算器角度ETHETA;当估算器的估算速度OMEGA大于等于EFREQMIN时,输出估算速度OMEGA作为最终速度EOME。
解释:
假设设置电机转速低于100转的时候,开始omega启动;速度增量是10,强制电机从0转开始,每个运算周期加10转,到300转前都需要强托。同时将当前的强制速度(也就是每个周期加10转这个速度)作为当前周期的速度估算器输出速度来计算当前的估算角度。当到300转之后,(按程序设置,应该还有4次平滑)把当前的估算器输出速度作为最终速度。
简单说就是:先速度开环,把速度拉到300转,期价用开环速度计算FOC中使用到的角度(大致角度);开环到300之后,用速度估算器(可能是250转),也就是计算出来的转速来算当前电机的角度(精确角度)。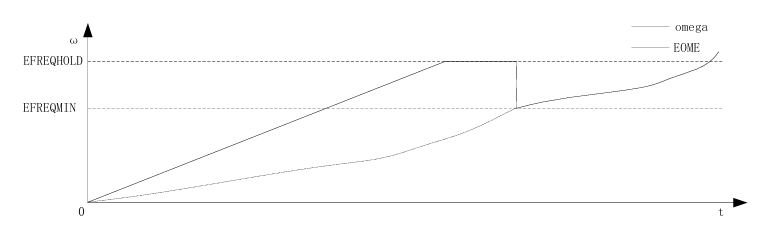
图注:EOME是实线,就是直挺的那一条。
这是手册中的Omega速度和EOME的速度关系,强拖速度起初会直接给EOME,所以他是一条有斜率的直线。中间平了,那个猜测应该是4次平滑,平滑后Omega会给EOME来计算精确的角度。
具体代码解析请看博客,调试我还没做,还在看代码,先记录一下,后续调试也放这里。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 20
20 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)