CAN简介&硬件电路
本章为CAN简介&硬件电路
目录
1.CAN简介
CAN总线(Controller Area Network Bus)控制器局域网总线
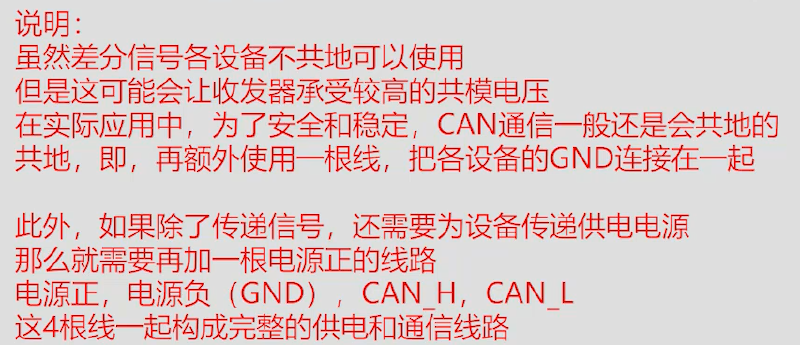
CAN总线是由BOSCH公司开发的一种简洁易用、传输速度快、易扩展、可靠性高的串行通信总线,广泛应用于汽车、嵌入式、工业控制等领域
CAN总线特征:
两根通信线(CAN_H、CAN_L),线路少
差分信号通信,抗干扰能力强
高速CAN(ISO11898):125k~1Mbps, <40m
低速CAN(ISO11519):10k~125kbps, <1km
异步,无需时钟线,通信速率由设备各自约定
半双工,可挂载多设备,多设备同时发送数据时通过仲裁判断先后顺序
11位(标准格式)/29位(扩展格式)报文ID,用于区分消息功能,同时决定优先级(ID号小的优先发送)
可配置1~8字节的有效载荷
应答、CRC校验、位填充、位同步、错误处理等特性
可实现广播式和请求式两种传输方式
广播式:一个设备发送数据,其他所有设备都能收到,然后接收方根据报文ID,来决定用不用这个数据
请求式:数据发送方不会主动广播自己的数据,而是只有收到接收方发出的请求,发送方才会发数据
应答、CRC校验、位填充、位同步、错误处理等特性
2.主流通信协议对比

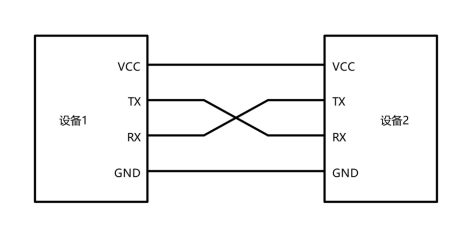
串口通信电路
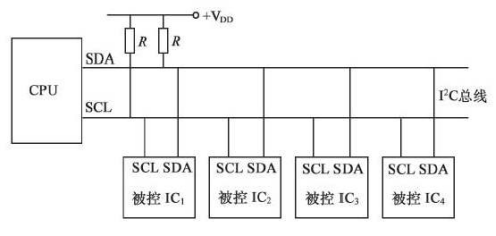
I2C通信电路
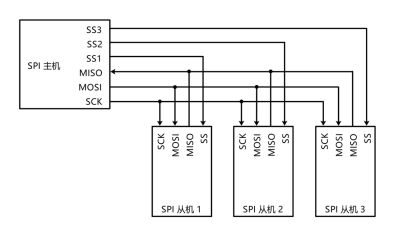
SPI通信电路
3.CAN硬件电路
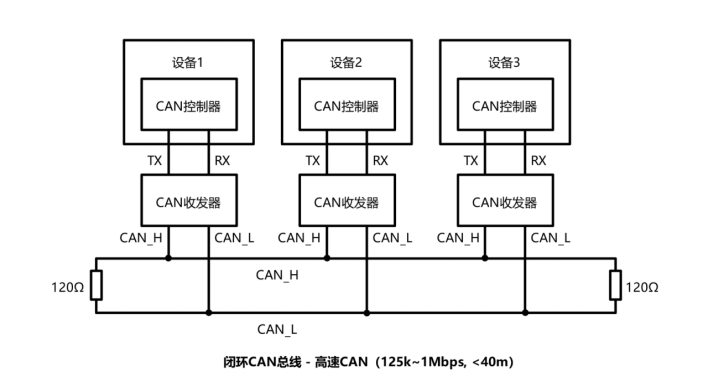
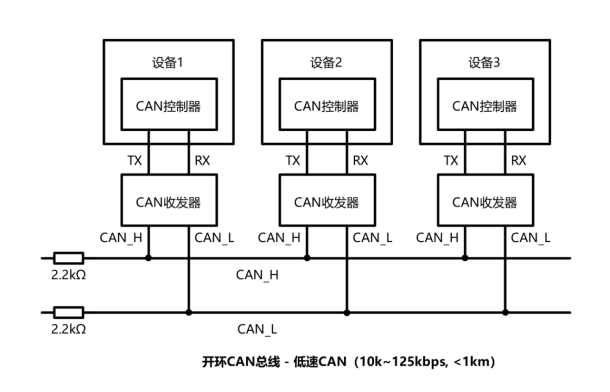
每个设备通过CAN收发器挂载在CAN总线网络上
CAN控制器引出的TX和RX与CAN收发器相连,CAN收发器引出的CAN_H和CAN_L分别与总线的CAN_H和CAN_L相连
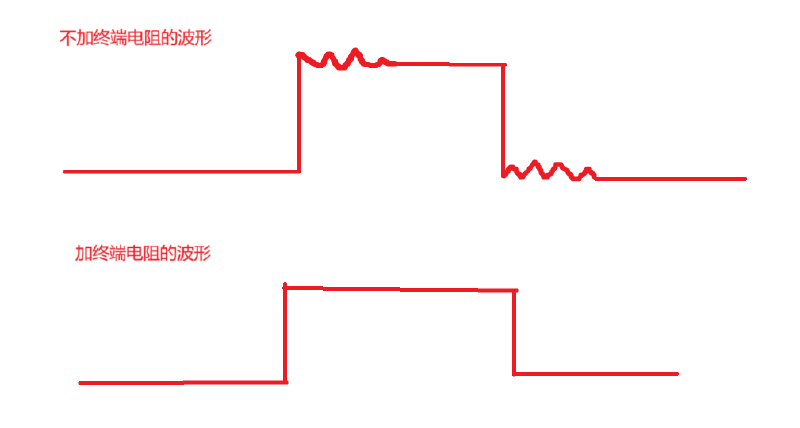
高速CAN使用闭环网络,CAN_H和CAN_L两端添加120Ω的终端电阻
终端电阻的作用:1.防止回波反射,如果不加终端电阻,信号波形会在线路终端反射,进而干扰原始信号;2.在没有设备操作时,将两根差分线的电压“收紧”使电压一致
低速CAN使用开环网络,CAN_H和CAN_L其中一端添加2.2kΩ的终端电阻
终端电阻的作用:只有防止回波反射的效果
电路图
4.CAN电平标准
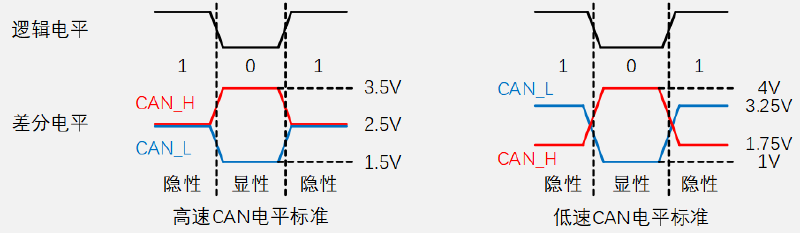
CAN总线采用差分信号,即两线电压差(VCAN_H-VCAN_L)传输数据位
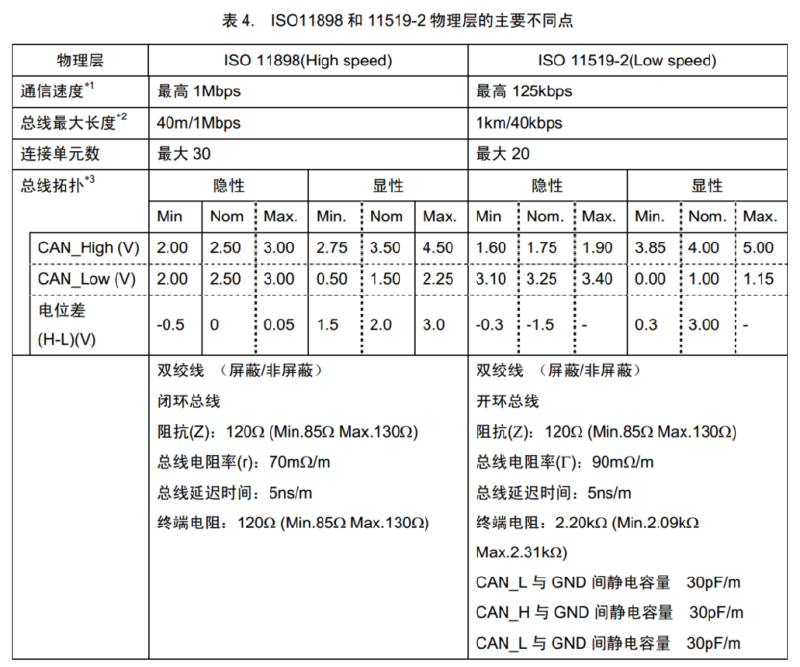
高速CAN规定:
电压差为0V时表示逻辑1(隐性电平)
电压差为2V时表示逻辑0(显性电平)
显隐性描述的是总线状态,1和0是为了与电路约定俗成的规则对应
低速CAN规定:
电压差为-1.5V时表示逻辑1(隐性电平)
电压差为3V时表示逻辑0(显性电平)
对比图
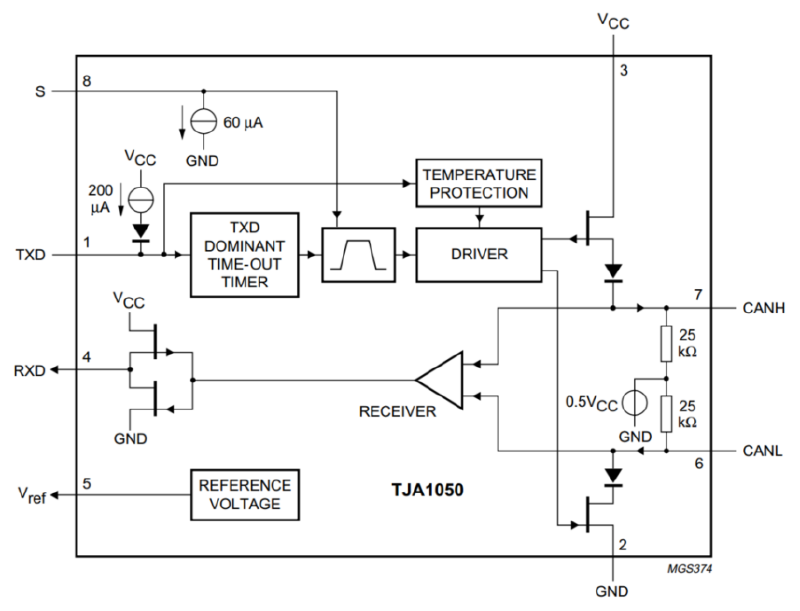
5.CAN收发器 – TJA1050(高速CAN)
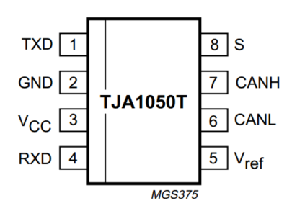
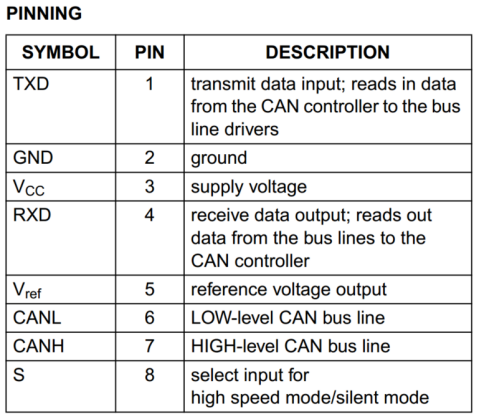
引脚定义
GND和VCC提供5V供电;TXD和RXD与设备的CAN控制器相连;CANH和CANL与CAN总线相连;V_ref是参考电压输出,可以不用;S选择是高速模式还是静默模式,可以不用
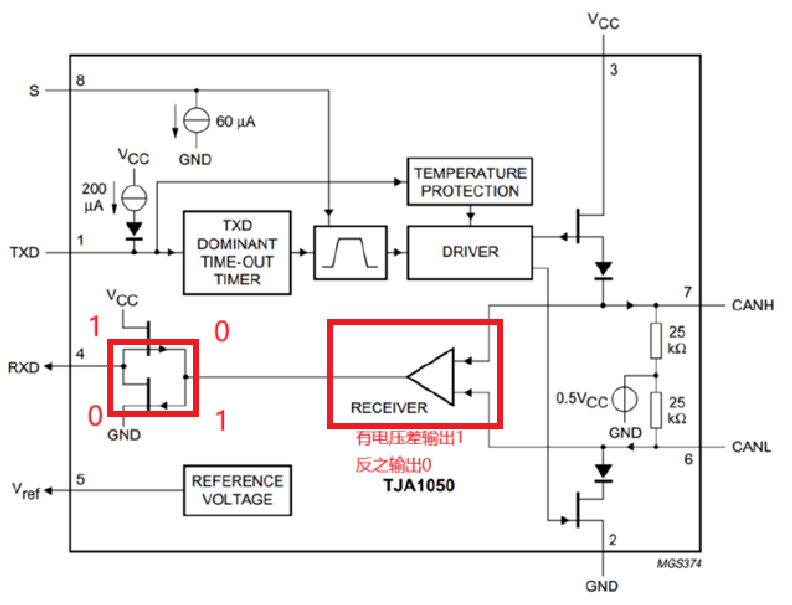
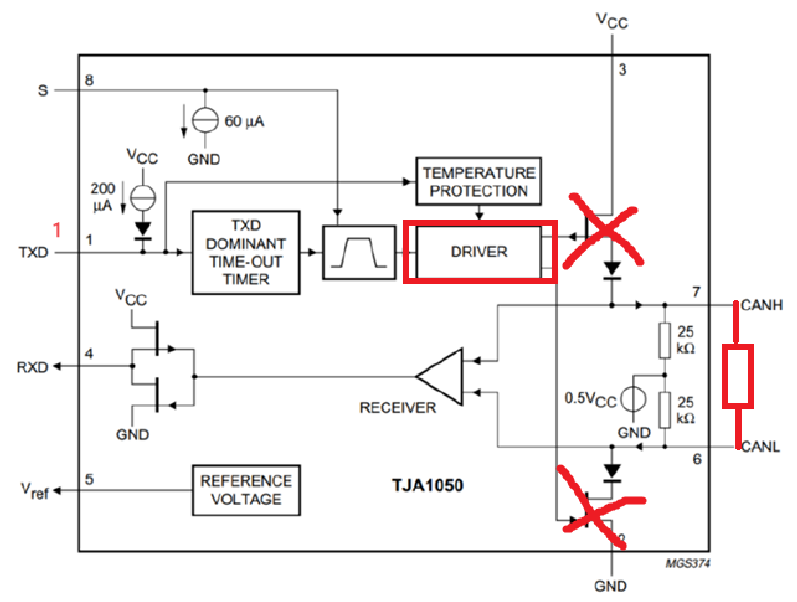
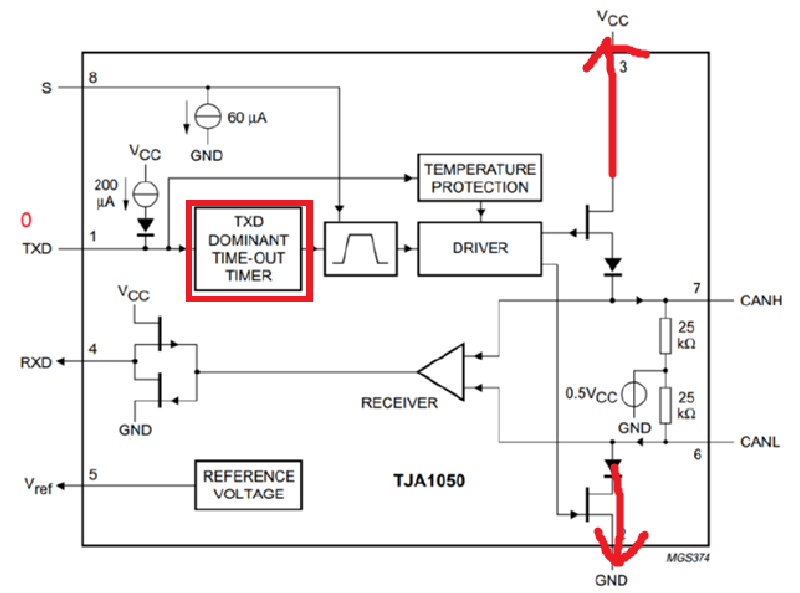
芯片内部
RXD部分:当CAN总线有电压差时,输出RXD引脚为低电平为0,表示显性电平;当CAN没有电压差时,输出RXD引脚为高电平1,表示隐性电平
TXD部分:输出部分。如果TXD给1,则不会对总线进行任何操作,总线呈现默认的隐性电平1;如果TXD悬空,则默认也给1,如果TXD给0,则驱动器会把CANH拉高,CANL拉低,输出显性电平0;如果TXD一直给0,出错了,收发器(TXD DOMINANT TIME-OUT TIMER)会主动释放CAN总线
6.CAN物理层特性
7.CAN总线资料

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 35
35 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)