Altium Designer 24/25四层PCB设计
B站jhp工作室课程学习记录1.热焊盘概念:在 layout 中,引脚与大面积的铺铜完全连接,容易造成过分散热而产生虚焊。因此对于接地引脚与大面积敷铜连接时,需要将实铜连接的方式,变为十字空心连接,以减少焊接中热量对周围的传导,便于人工焊接。2.阻抗的概念:PCB 阻抗,是高速信号在走线时受到的。它由线宽、与参考地间距、板材绝缘特性等决定,控制阻抗是为了,保证高速电路稳定工作。3.SI9000与嘉
一.项目介绍
B站jhp工作室课程学习记录
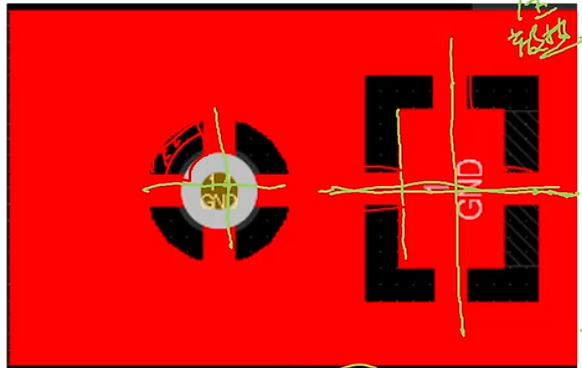
1.热焊盘概念:在 layout 中,引脚与大面积的铺铜完全连接,容易造成过分散热而产生虚焊。因此对于接地引脚与大面积敷铜连接时,需要将实铜连接的方式,变为十字空心连接,以减少焊接中热量对周围的传导,便于人工焊接。
2.阻抗的概念:PCB 阻抗,是高速信号在走线时受到的综合阻碍作用。它由线宽、与参考地间距、板材绝缘特性等决定,控制阻抗是为了避免信号反射、失真,保证高速电路稳定工作。
3.SI9000与嘉立创阻抗计算神器工具学习使用
4.共面单端和共面差分就是线周围有包地处理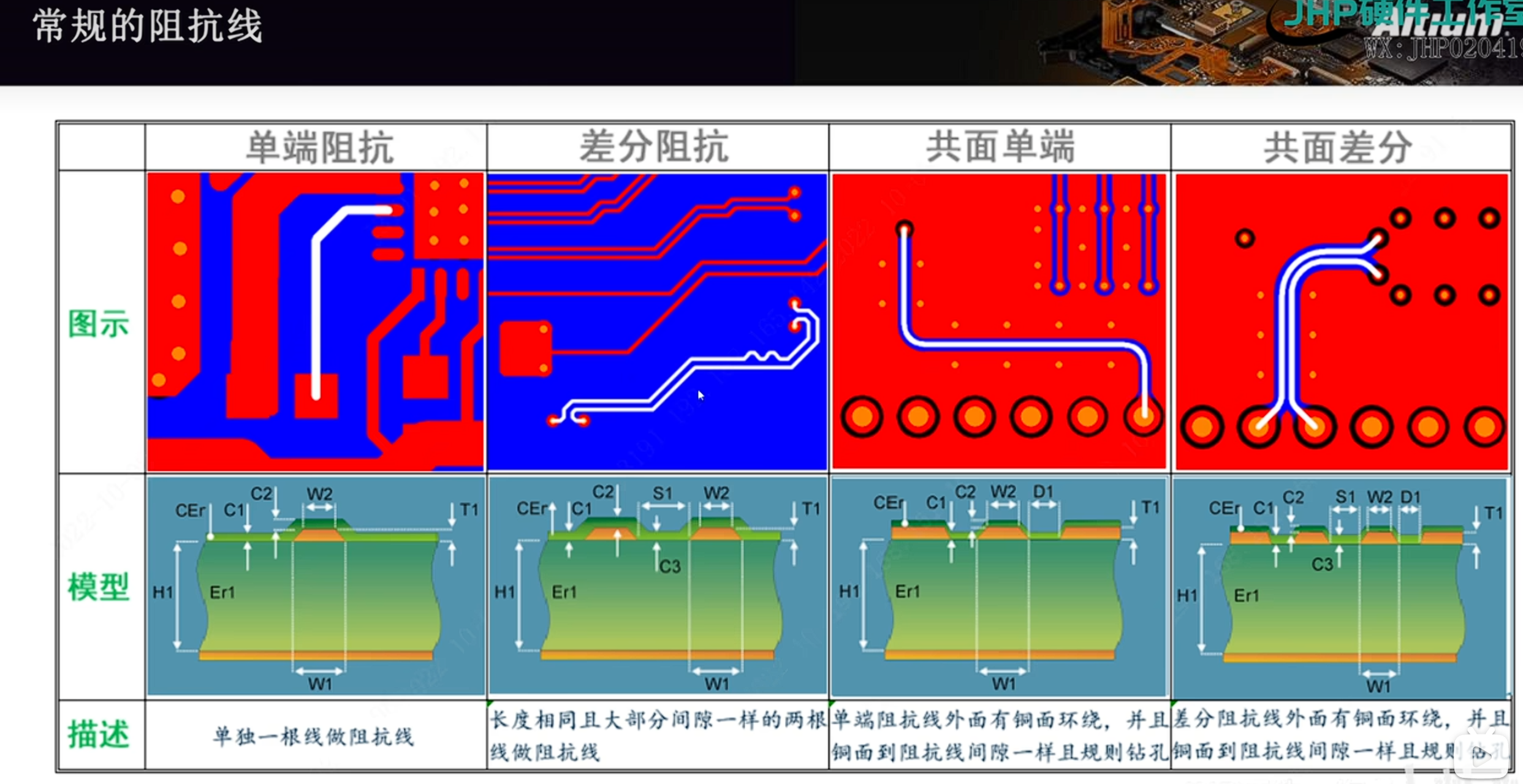
(1)阻抗线可以设计在外层(如上表四种形式均为外层阻抗),也可以设计在内层
(2)阻抗值的大小依产品设计及芯片类型定,一般的情况下,元器件厂商有设定好信号源和接收端的阻抗的(如 SDIO:单端 50ohm,USB:差分 90ohm)
(3)阻抗线一定要有阻抗参考层,一般以相邻的接地或电源层做参考层(如顶层阻抗线,那么参考层一般为第二层)
(4)阻抗参考层作用是为了给信号提供回流路径,并起电磁屏蔽作用,因此阻抗线对应的参考层位置必须是实心铜皮覆盖。
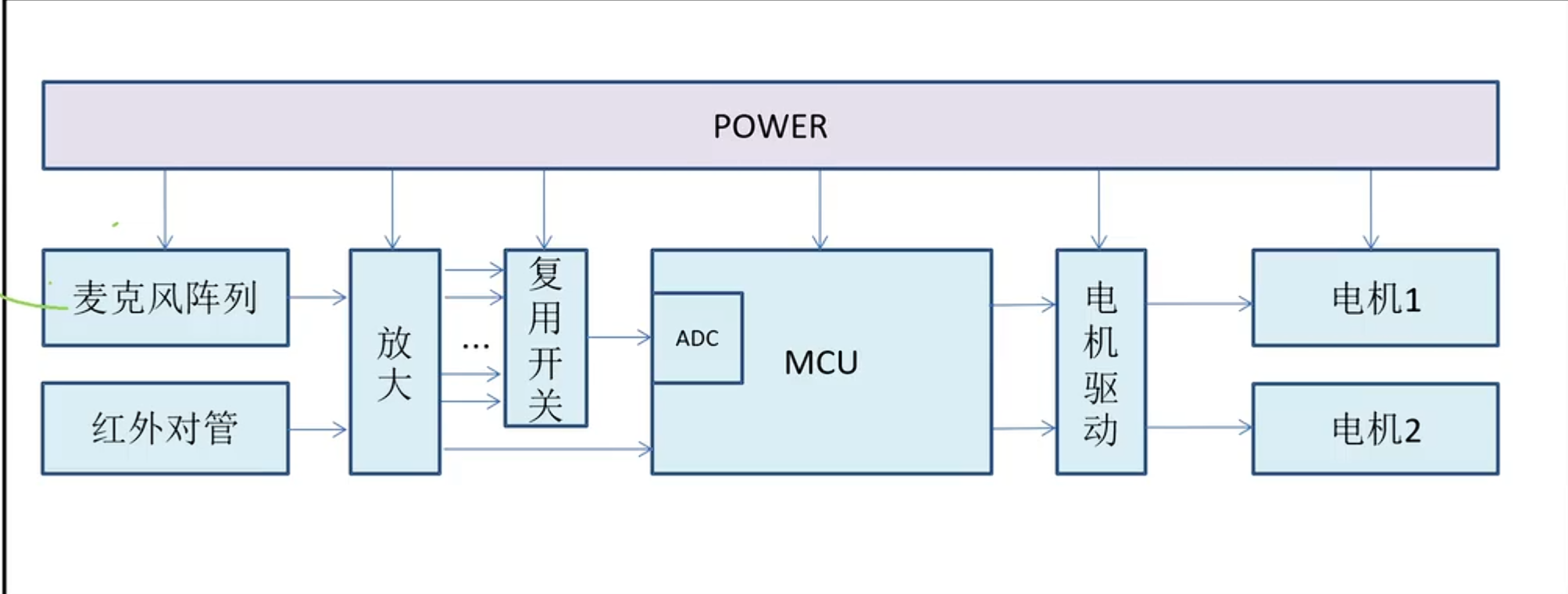
5.声源小车设计框图
二.电路设计部分
声音检测放大电路设计
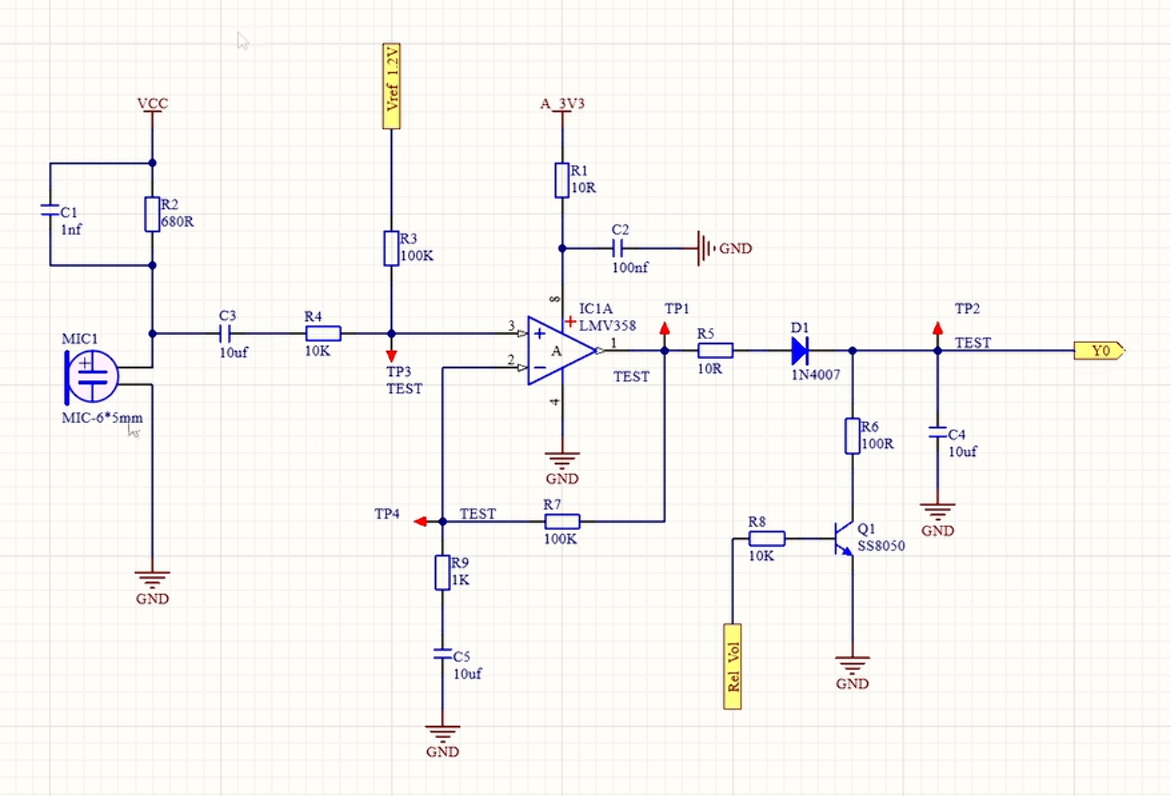
(一)麦克风偏置与输入拾音模块(MIC1、C1、R2)
这是电路的信号输入端,负责将声音转换为微弱的电信号。
- MIC1:6*5mm 规格的驻极体麦克风,内部集成场效应管,必须外接直流偏置才能正常工作,输出叠加在直流偏置上的音频交流信号。
- R2(680Ω):驻极体麦克风的偏置上拉电阻,VCC 通过 R2 给 MIC 内部的场效应管提供工作电流,是驻极体 MIC 的标准外围电路。
- C1(1nF):高频去耦 / 滤波电容,与 R2 组成 RC 滤波网络,一方面滤除 VCC 电源中的高频噪声,给 MIC 提供干净的偏置电源;另一方面滤除 MIC 输出的射频杂波,避免高频干扰进入后级放大电路。
(二)隔直耦合与运放静态偏置模块(C3、R4、R3、Vref 1.2V)
负责隔离前后级的直流分量,同时给单电源运放提供稳定的静态工作点,避免信号失真。
- C3(10μF):隔直耦合电容,只允许 MIC 输出的音频交流信号通过,完全隔离前级的直流偏置电压,避免直流分量影响后级运放的工作点。
- R4(10K):限流 / 阻抗匹配电阻,限制输入信号的电流,同时匹配前后级阻抗,减少信号反射。
- R3(100K)+ Vref 1.2V:运放同相端直流偏置电路。本电路中 LMV358 运放采用单电源供电(正电源 3.3V、负电源接地),无法处理负电压信号,因此必须给输入端提供一个中点直流偏置,让音频交流信号可以围绕这个直流电平正负摆幅,避免负半周被削波失真。
- 静态无信号时,运放同相端(3 脚)的直流电压固定为 1.2V,为运放提供稳定的静态工作点。
- TP3 为测试点,可监测同相输入端的信号与直流偏置是否正常。
(三)同相交流放大模块(核心:LMV358 运放,R7、R9、C5)
这是电路的核心放大单元,将麦克风的微弱音频信号放大 100 倍以上,是典型的单电源同相交流放大电路。
- 核心芯片 LMV358:低功耗双路运算放大器,这里只用了其中一路,单电源 3.3V 供电,8 脚为正电源、4 脚为地。
- 电源滤波(R1、C2):A_3V3 通过 R1(10Ω)+ C2(100nF)组成 RC 低通滤波,给运放提供干净的电源,滤除电源高频噪声,避免运放自激、保证放大稳定性。
- 负反馈与放大倍数设计:
- 反馈回路:运放输出端(1 脚)→ R7(100K)→ 反相输入端(2 脚)→ R9(1K)→ C5(10μF)→ 地。
- 直流特性:C5 对直流相当于开路,直流反馈系数为 1,运放直流增益 = 1。根据运放 “虚短” 特性,静态时反相端电压 = 同相端 1.2V,输出端静态直流电压也稳定在 1.2V,保证工作点不漂移。
- 交流特性:C5 对音频交流信号相当于短路,同相放大的交流增益公式为
Av = 1 + R7/R9 = 1 + 100K/1K = 101倍,可将毫伏级的麦克风信号放大到伏级,满足后级检波需求。
- 测试点:TP4 监测反相输入端信号,TP1 监测运放放大后的输出信号,可用于调试放大倍数、排查失真问题。
(四)峰值检波与整流滤波模块(R5、D1、R6、C4)
将放大后的交流音频信号,转换为与声音峰值 / 音量成正比的直流电压,实现 “声音越大、输出直流电压越高” 的功能。
- R5(10Ω):限流电阻,限制流入二极管的电流,保护二极管和前级运放。
- D1(1N4007):整流二极管,单向导通,只允许音频信号的正半周通过,给后级电容充电。
- C4(10μF):峰值保持电容,正半周信号通过 D1 给 C4 充电,电容电压会跟随音频信号的峰值;信号负半周时,D1 截止,电容通过 R6 缓慢放电,保持峰值电压。
- R6(100Ω):泄放电阻,给 C4 提供放电回路,时间常数
τ=R6*C4=1ms,可快速跟随声音的变化,同时滤除交流纹波,输出平滑的直流电压。 - 输出与测试点:TP2 为检波输出测试点,Y0 为最终的直流输出,可直接接入单片机 ADC 引脚,实现音量检测、声控触发等功能。
(五)可控复位开关模块(R8、Q1、Rel Vol)
实现对峰值检波输出电压的可控清零复位,是电路的辅助控制单元。
- Q1(SS8050):NPN 型三极管,作为电子开关使用;R8(10K)为基极限流电阻,避免三极管过流损坏。
- 控制逻辑:
- 当
Rel Vol输入高电平时,三极管饱和导通,C4 通过导通的三极管直接对地快速放电,Y0 输出电压被迅速拉低至 0V,完成峰值电压的复位清零。 - 当
Rel Vol输入低电平时,三极管截止,不影响峰值检波电路的正常工作,C4 正常充放电。
- 当
- 典型用途:单片机检测到声音峰值后,给
Rel Vol输出一个高电平脉冲,将 Y0 电压清零,准备下一次声音检测,避免峰值电压长时间保持导致的误判。
红外避障电路设计
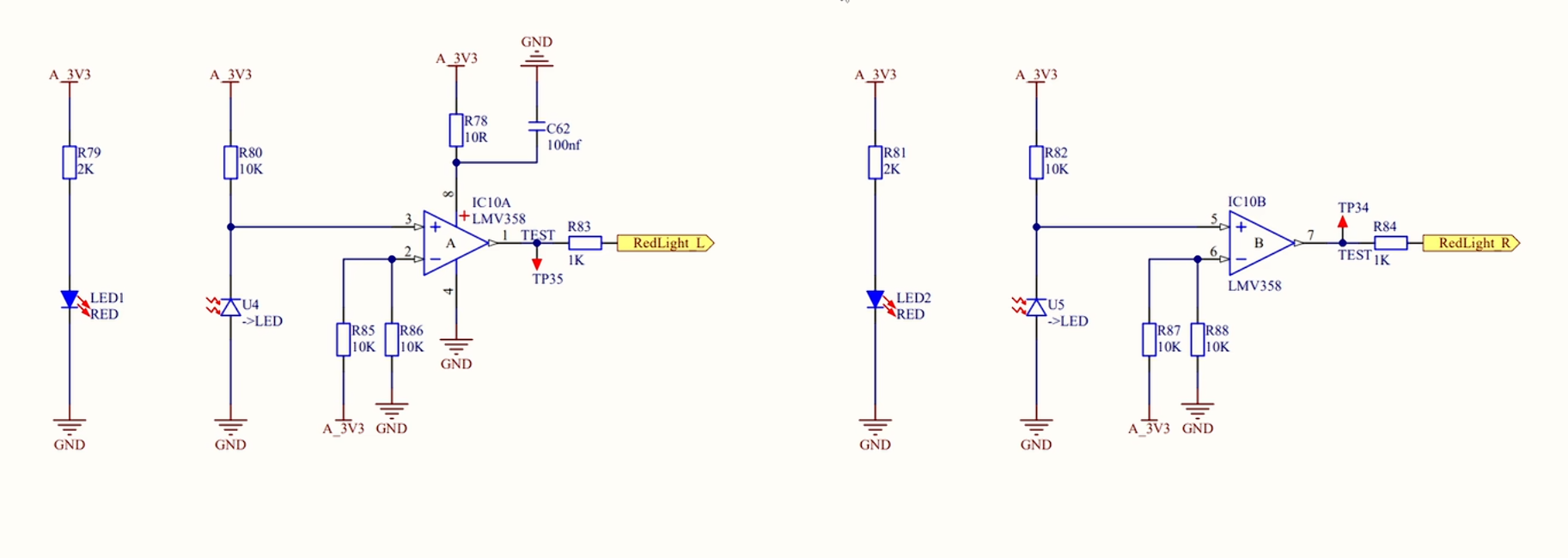
(一)红外发射电路(LED1、LED2)
- 功能:向外发射固定波长的红外光,作为检测光源。
- 元件说明:
A_3V3供电,R79/R81(2KΩ)为限流电阻,计算电流约:I = (3.3V - 1.8V)/2KΩ ≈ 0.75mA,属于低功耗小电流发射,避免红外管过流烧毁。LED1/LED2为红外发射管,发射的红外光遇到障碍物会反射,被旁边的接收管捕捉。
(二)红外接收电路(U4、U5)
- 功能:接收反射回来的红外光,将光信号转换为电信号。
- 元件说明:
U4/U5是红外接收二极管(光敏管),反向连接在电路中:无红外光时,漏电流极小;有反射光照射时,漏电流增大,相当于电阻变小。R80/R82(10KΩ)是上拉电阻,接收管和上拉电阻组成分压电路:- 无反射光时:接收管呈高阻态,分压点电压接近
A_3V3(高电平)。 - 有反射光时:接收管导通电阻变小,分压点电压被拉低(低电平)。
- 无反射光时:接收管呈高阻态,分压点电压接近
- 分压点的电压信号,直接送入后级运放的同相输入端(3 脚 / 5 脚)。
(三)运放比较器电路(IC10A、IC10B,LMV358)
这是电路的核心,将接收管的电压与固定阈值比较,输出数字信号,两路结构完全对称,以左侧 A 路为例:
- 电源滤波(R78、C62):
A_3V3通过10Ω电阻 +100nF电容组成 RC 滤波,给运放供电,滤除电源噪声,保证比较器稳定工作。 - 参考电压设置(反相端 2 脚):
R85(10K)、R86(10K)组成分压电路,A_3V3经过两个 10K 电阻分压,反相端电压固定为3.3V/2 = 1.65V,这是比较器的阈值电压。 - 比较逻辑:
- 同相端(3 脚)电压 > 反相端(2 脚)1.65V → 运放输出高电平(接近 3.3V)。
- 同相端(3 脚)电压 < 反相端(2 脚)1.65V → 运放输出低电平(接近 0V)。
- 输出电路:运放输出端(1 脚 / 7 脚)串联
R83/R84(1KΩ)限流电阻,最终输出RedLight L/RedLight R信号,可直接接入单片机 IO 口读取状态。
H桥电机驱动电路设计
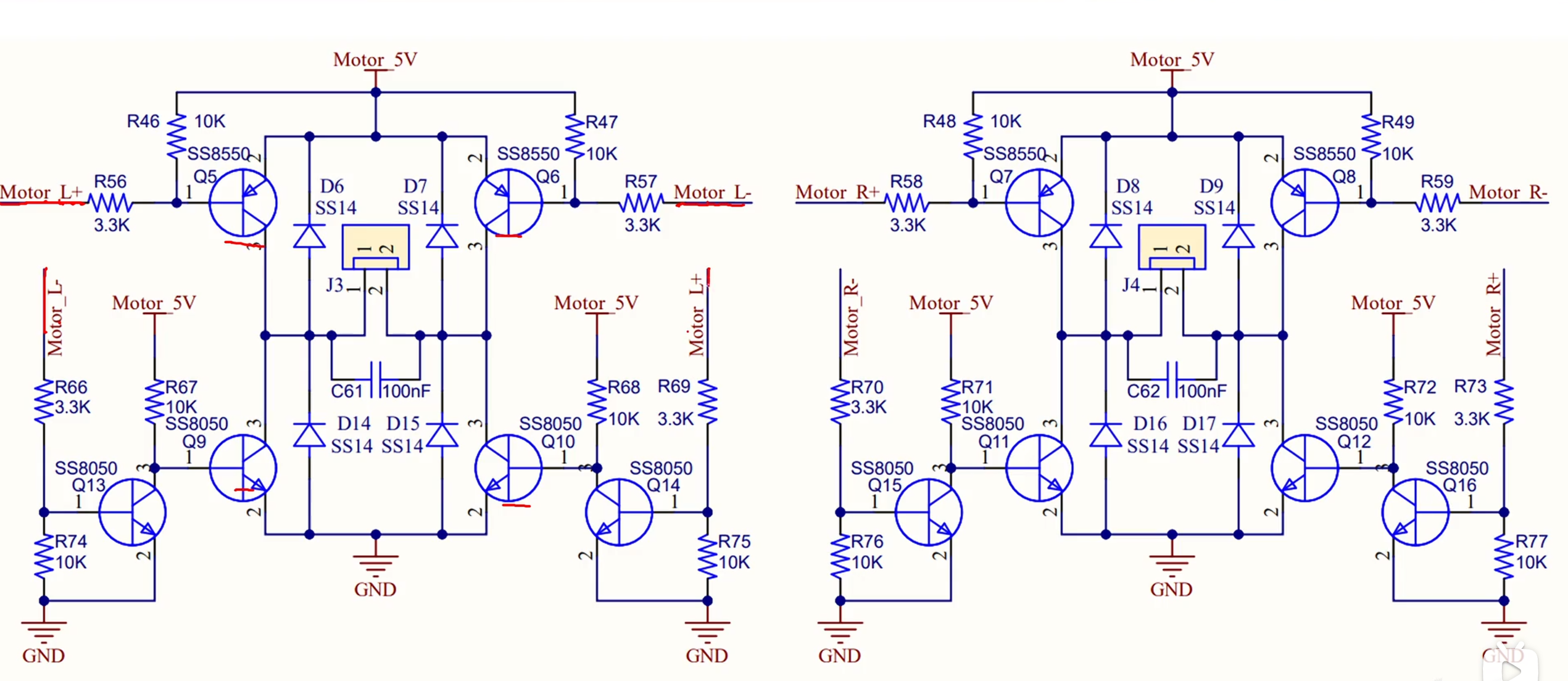
(一)核心结构:H 桥拓扑
每路电机驱动都由 4 个三极管组成标准 H 桥:
- 左上:
Q5(SS8550,PNP) - 右上:
Q6(SS8550,PNP) - 左下:
Q9(SS8050,NPN) - 右下:
Q10(SS8050,NPN) - 中间
J3为电机接口,Motor_5V为电源输入,GND为地。
(二)三极管与驱动信号详解
1. 上桥臂 PNP 管(Q5/Q6)
- 电源:发射极接
Motor_5V,集电极接电机两端。 - 基极驱动:由
Motor_L+/Motor_L-信号控制,串联R56/R57(3.3KΩ)限流;基极上拉R46/R47(10KΩ)到Motor_5V,默认基极电位等于电源,管子关断。 - 导通条件:
Motor_L+拉低 →Q5基极电位低于发射极,管子导通;反之关断。
2. 下桥臂 NPN 管(Q9/Q10)
- 电源:发射极接
GND,集电极接电机两端。 - 基极驱动:由前级
Q13/Q14(SS8050)控制;基极下拉R74/R75(10KΩ)到地,默认基极电位为 0,管子关断。 - 导通条件:
Motor_L-拉低 →Q14基极无电流、关断 →Q10基极通过R68(10KΩ)上拉到Motor_5V,管子导通;反之Motor_L-拉高时,Q14导通,Q10基极被拉低关断。
3. 前级驱动三极管(Q13/Q14)
- 作用:作为
Motor_L-信号的反相器,实现下桥臂的逻辑控制。 - 驱动信号:
Motor_L-经R66/R69(3.3KΩ)输入基极,基极下拉R74/R77(10KΩ)到地。 - 逻辑:输入高电平→管子导通;输入低电平→管子关断。
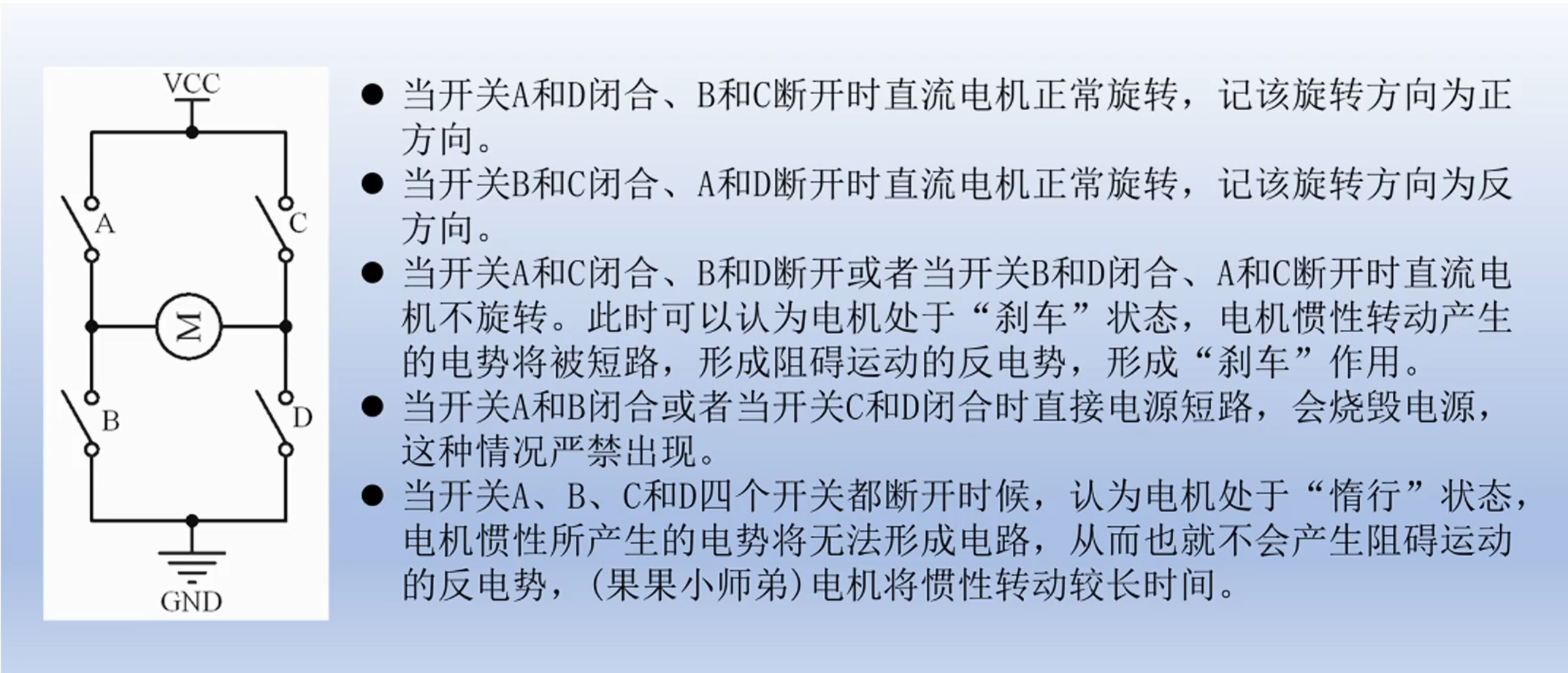
(三)电机工作状态与逻辑真值表(单路)
| Motor_L+ | Motor_L- | 导通三极管 | 电机状态 | 电流路径 |
|---|---|---|---|---|
| 高(3.3V) | 高(3.3V) | 无(全关) | 停机 | 无电流 |
| 低(0V) | 低(0V) | Q5、Q9 | 正转 | Motor_5V→Q5→电机→Q9→GND |
| 高(3.3V) | 低(0V) | Q6、Q10 | 反转 | Motor_5V→Q6→电机→Q10→GND |
| 低(0V) | 高(3.3V) | 无(全关) | 停机 / 刹车 | 电机两端悬空,无电流 |
(四)关键辅助元件说明
- 续流二极管(D6/D7/D14/D15,SS14)跨接在电机两端的 4 个肖特基二极管,用于吸收电机断电 / 换向时产生的反向电动势,保护三极管不被高压击穿,同时降低 EMI 干扰。
- RC 吸收电路(C61/C62,100nF)并联在电机两端的电容,用于抑制电机换向时的尖峰电压,吸收感性负载的电流突变,减少火花和电磁干扰。
- 限流电阻(R56/R57/R66/R69,3.3KΩ)限制单片机 IO 口输出电流,防止驱动三极管时过流损坏 IO 口,同时匹配三极管的基极电流需求。
- 上拉 / 下拉电阻(R46/R47/R67/R68,10KΩ)上拉电阻确保 PNP 管默认关断,下拉电阻确保 NPN 管默认关断,避免浮空导致的误触发。
(五)电路特点与注意事项
- 优势:纯分立元件 H 桥,成本低、响应快,适合 5V 小功率直流电机驱动;双路对称设计,可同时控制两个电机(如小车左右轮)。
- 注意事项:
- 禁止同时让
Motor_L+和Motor_L-都为低电平以外的组合,避免上下桥臂直通短路(烧毁三极管和电源)。 - 三极管选型为 SS8050/8550,单路持续电流约 500mA,适合小型玩具电机,不适合大功率电机。
- 前级驱动的反相逻辑需要注意,避免控制信号逻辑搞反导致电机不转或反向。
- 禁止同时让

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)