IMU欧拉角死锁问题和引入四元数
欧拉角死锁:俯仰到±90°时,三轴变两轴,角度计算卡死错乱。根源:欧拉角是顺序旋转,会轴重叠。姿态解算全程用四元数,别直接用欧拉角迭代。我给你工程最简完整流程,纯实操、嵌入式直接能用,不讲复杂高数,一步一步:输入:加速度、陀螺仪(角速度)中间:四元数姿态迭代输出:稳定无死锁的 欧拉角(Roll / Pitch / Yaw)
用纯大白话 + 无人机/穿戴/IMU 实际场景,一次性讲懂,不整公式。
1. 先懂三个基础
IMU 欧拉角一般就是:
- 横滚 Roll(左右歪)
- 俯仰 Pitch(抬头、低头)
- 偏航 Yaw(左右转头)
欧拉角的逻辑:按固定顺序,一层层旋转叠加。
2. 欧拉角死锁 = 万向节死锁(Gimbal Lock)
人话翻译:
当俯仰角转到 ±90° 附近时,另外两个轴(横滚+偏航)会被“强行合并成一个轴”,
少了一个自由度,角度计算直接错乱、卡死、乱飘、突变。
举个最形象的例子
你抬头完全垂直向上看(Pitch=90°):
- 本来:转头是偏航、歪头是横滚
- 一旦抬头90度:
你转头和歪头,在欧拉角公式里变成同一个动作 - 两个轴卡死重叠 → 角度丢失、计算崩溃
👉 这就叫:欧拉角死锁
3. 对你硬件产品的实际影响(你做AI显示/穿戴/耳机头追)
- 设备抬头/低头幅度大时
- 姿态突然跳变、画面翻转
- 方向识别错乱、头部追踪失灵
- 角度滤波失效,IMU 数据抖动、漂移爆炸
- 无法做大角度姿态运动
4. 为什么会出现?
欧拉角是顺序旋转、依附坐标轴的
它不是独立三维空间计算,是“先转A→再转B→再转C”
只要中间某个轴转到极限角度,
两个旋转轴重合,直接少一维,数学上就锁死。
5. 怎么彻底解决(工程必用方案)
工程上绝对不用纯欧拉角做IMU姿态解算,就是怕死锁:
-
改用四元数 Quaternion(最常用)
- 无死锁、全角度稳定、芯片/算法库都自带
- ESP32、单片机、IMU 库标配方案
-
改用 旋转矩阵
-
限制俯仰角量程(软件限位,治标不治本)
行业标准流程
IMU原始数据 → 四元数解算 → 按需转欧拉角给上层显示
计算用四元数,展示用欧拉角,完美避开死锁
6. 极简总结(背下来就行)
- 欧拉角死锁:俯仰到±90°时,三轴变两轴,角度计算卡死错乱。
- 根源:欧拉角是顺序旋转,会轴重叠。
- 解决:姿态解算全程用四元数,别直接用欧拉角迭代。
我给你工程最简完整流程,纯实操、嵌入式直接能用,不讲复杂高数,一步一步:
输入:加速度、陀螺仪(角速度)
中间:四元数姿态迭代
输出:稳定无死锁的 欧拉角(Roll / Pitch / Yaw)
一、先统一:原始数据→物理单位
1. 陀螺仪(角速度)
芯片读出值 gyro_x/y/z(原始int16)
量程例如 ±250dps
[
\text{gyro_rad} = \text{raw} \times \text{lsb} \times \frac{\pi}{180}
]
- 转成 rad/s 弧度每秒(姿态解算必须用弧度)
2. 加速度计
[
\text{acc}_g = \text{raw} \times \text{lsb}
]
直接转成 g 重力单位
二、核心原理(大白话)
- 陀螺仪:高频、动态准,但是会积分漂移
- 加速度计:静态准、不会飘,但是动态抖动大
- 算法做融合互补:
- 高速姿态变化靠陀螺仪积分更新四元数
- 静止/缓慢运动靠加速度修正误差
- 全程用四元数迭代更新姿态,永远不会万向节死锁
- 最后一步:四元数 → 欧拉角 数学换算
三、标准固定流程(嵌入式通用)
-
初始化四元数
[
q = [1,\ 0,\ 0,\ 0]
]
初始姿态正放 -
定时采样(固定dt,比如 100Hz~500Hz)
- 读取 三轴角速度 (g_x,g_y,g_z\ \text{(rad/s)})
- 读取 三轴加速度 (a_x,a_y,a_z\ \text{(g)})
- AHRS 融合算法更新四元数
工程只用到三种:
- Mahony 算法(最简、资源占用极低,单片机/ESP32首选)
- Madgwick(精度更高,计算多一点)
- 互补滤波(入门)
所有开源 IMU 库(MPU6050/ICM20602)都是:
「陀螺仪积分更新四元数 + 加速度计梯度修正」
-
得到最新实时四元数:
[
q_0,\ q_1,\ q_2,\ q_3
] -
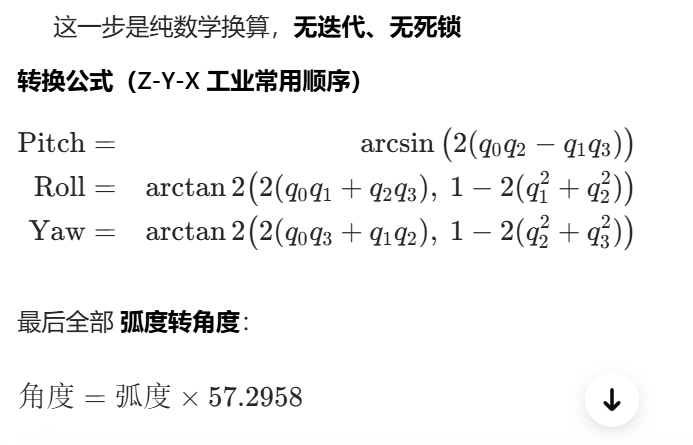
四元数 → 欧拉角(Roll/Pitch/Yaw)公式
四、关键关键点(你踩坑必看)
-
绝对不能:直接用陀螺仪积分欧拉角
👉 必死锁、必漂移、必乱跳
✅ 正确:积分更新四元数,最后一次性转欧拉角显示 -
Yaw(偏航)天然弱点
加速度计无法修正航向,所以 Yaw 会缓慢漂移,
耳机头追、空间音频都是:
- 短时间靠陀螺
- 高端加磁力计(九轴)修正 Yaw
- 采样周期 dt 必须精准
![[
dt = \frac{1}{\text{采样频率}}
]
Mahwick/Madgwick 里积分步长全靠 dt](https://i-blog.csdnimg.cn/direct/ea01d7833e354a909bad5a2f5bd7246b.png)
五、极简代码逻辑(伪代码,直接能移植C)
// 1. 读取物理值(rad/s、g)
read_gyro(&gx, &gy, &gz);
read_acc(&ax, &ay, &az);
// 2. Mahony算法:输入陀螺+加速度,输出最新四元数
Mahony_update(gx, gy, gz, ax, ay, az, dt, &q0,&q1,&q2,&q3);
// 3. 四元数转欧拉角(角度)
roll = quat2roll(q0,q1,q2,q3) * 57.2958f;
pitch = quat2pitch(q0,q1,q2,q3) * 57.2958f;
yaw = quat2yaw(q0,q1,q2,q3) * 57.2958f;
六、一句话总结整条链路


智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 8
8 0
0- 0



 已为社区贡献40条内容
已为社区贡献40条内容

所有评论(0)