基于STM32的PWM控制舵机与直流电机项目
脉冲宽度调制(Pulse Width Modulation,简称PWM)是一种常用的技术,用于控制电机速度、调节LED亮度以及在电源管理中实现效率更高的电压转换。PWM通过调整脉冲的宽度来控制信号的平均功率输出。简言之,就是通过改变方波的高电平时间比例,来控制有效电压。JX360度舵机是一种精密控制的小型伺服系统,广泛应用于模型飞机、汽车、机器人等领域。它由一个直流电机、一个位置检测器(通常是电位

简介:该简介解释了利用PWM(脉宽调制)技术控制舵机和直流电机的基本原理。提到了JX360度舵机可以实现全方位控制和高精度调节。使用HC-05蓝牙模块进行无线指令传输,以控制炮台。STM32 F407微控制器用于处理蓝牙数据并生成PWM信号。简介强调了对PWM技术、舵机、蓝牙通信、微控制器编程和直流电机控制等知识点的理解,对初学者而言,这是一个涉及嵌入式系统和机器人技术的综合性学习项目。 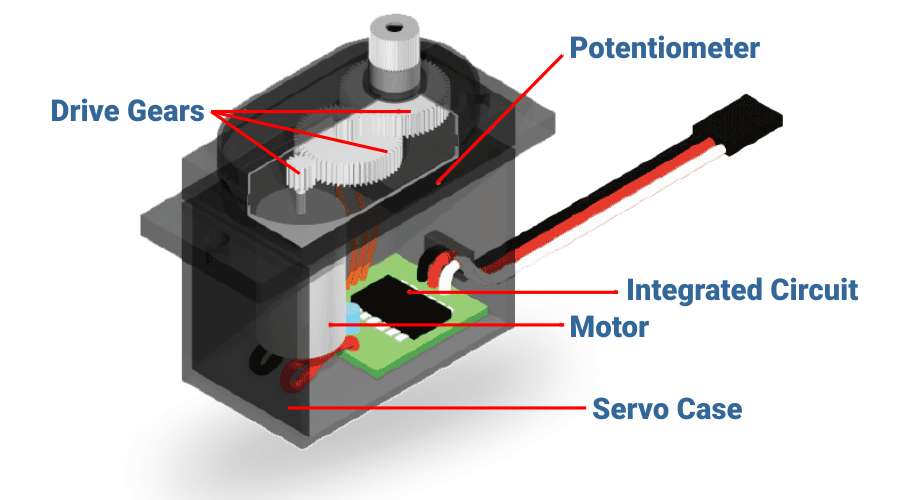
1. PWM控制技术
PWM控制技术概述
脉冲宽度调制(Pulse Width Modulation,简称PWM)是一种常用的技术,用于控制电机速度、调节LED亮度以及在电源管理中实现效率更高的电压转换。PWM通过调整脉冲的宽度来控制信号的平均功率输出。简言之,就是通过改变方波的高电平时间比例,来控制有效电压。
PWM信号的生成与调整
PWM信号的生成通常依赖于微控制器的定时器模块。通过设定定时器的周期和占空比,即可产生相应的PWM波形。占空比是指在一个周期内,信号处于高电平的时间与周期时间的比例。在微控制器中,如Arduino,可以使用 analogWrite() 函数来控制PWM输出。
示例代码(Arduino)
// 设置PWM信号输出,引脚9,占空比128(大约50%)
analogWrite(9, 128);
调整PWM信号时,需要改变定时器的计数值或调整计数器的比较匹配值。例如,在STM32微控制器中,使用定时器的自动重装载寄存器(ARR)和捕获/比较寄存器(CCR)来控制周期和占空比。
示例代码(STM32 HAL库)
// 初始化PWM时钟和通道,设置PWM周期和占空比
TIM_HandleTypeDef htim;
htim.Instance = TIM1;
htim.Init.Prescaler = 0; // 分频器值
htim.Init.CounterMode = TIM_COUNTERMODE_UP;
htim.Init.Period = 999; // 自动重装载值,产生1KHz的PWM
htim.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim);
// 开始PWM信号输出
__HAL_TIM_SET_COMPARE(&htim, TIM_CHANNEL_1, 500); // 设置占空比为50%
HAL_TIM_PWM_Start(&htim, TIM_CHANNEL_1);
使用PWM技术的关键在于精确控制信号的频率和占空比,以满足不同的应用需求。在下一章节,我们将深入探讨PWM信号在舵机控制中的应用。
2. JX360度舵机工作原理与控制
2.1 JX360度舵机概述
2.1.1 舵机的基本结构与组成
JX360度舵机是一种精密控制的小型伺服系统,广泛应用于模型飞机、汽车、机器人等领域。它由一个直流电机、一个位置检测器(通常是电位计)、控制电路以及减速齿轮组组成。直流电机通过齿轮减速后,将动力传递到输出轴。位置检测器通过电位计监测输出轴的位置,保证输出轴能准确到达预定的位置。控制电路接收来自外部的控制信号,调整直流电机的工作状态,以实现对输出轴的位置精确控制。
2.1.2 舵机的控制原理
舵机的工作原理基于闭环反馈机制。控制信号通常是脉冲宽度调制(PWM)信号,其脉冲宽度对应于舵机应达到的位置。当控制信号输入到舵机时,控制电路会比较反馈信号(来自位置检测器的信号)和期望信号(控制脉冲的宽度)。如果两者不一致,则电路会通过调整电机的转动来减少这个差值,直至达到平衡状态,此时舵机输出轴的位置与控制信号中的位置相匹配。这个反馈机制确保了舵机可以非常精确地响应控制信号,实现高精度的定位。
2.2 PWM信号在舵机控制中的应用
2.2.1 PWM信号的生成与调整
PWM信号是一种常见的控制信号,其频率通常保持固定,但脉冲宽度可以根据控制需求进行调整。在舵机控制中,PWM信号的脉冲宽度一般在1毫秒到2毫秒之间变化。1毫秒的脉冲宽度通常对应于舵机的最小位置(比如0度),而2毫秒的脉冲宽度对应于舵机的最大位置(比如180度)。通过改变脉冲宽度,可以控制舵机转动到任意角度。
生成PWM信号的硬件有专用的PWM控制器和微控制器的定时器/计数器单元。下面的代码块展示了一个简单的PWM信号生成示例,以及逻辑分析和参数说明:
// 伪代码,展示PWM信号生成逻辑
void setup() {
// 初始化定时器配置,设置PWM频率
Timer.setFrequency(20000); // 20kHz PWM频率
// 设置PWM占空比,对应不同的脉冲宽度
Timer.setDutyCycle(10); // 设置占空比为10%,即1ms脉宽
}
void loop() {
// 在循环中调整占空比以控制舵机位置
Timer.setDutyCycle(5); // 调整到5%占空比,减少脉宽至0.5ms
Timer.setDutyCycle(15); // 调整到15%占空比,增加脉宽至1.5ms
}
在这个示例中, Timer.setFrequency(20000) 设置了PWM信号的频率为20kHz,而 Timer.setDutyCycle(10) 设置了脉冲宽度为1ms,假设这是舵机的中位信号。通过在循环中改变占空比,可以控制舵机转动到不同的位置。
2.2.2 舵机与PWM信号的响应关系
舵机与PWM信号之间存在着直接的响应关系,即PWM信号的脉宽直接决定了舵机的旋转角度。由于舵机内部的控制电路会解析PWM信号,并转换成对应的角度输出,因此了解这种关系对于精确控制舵机至关重要。下表展示了这种对应关系的一个大致示例:
| PWM脉冲宽度 (ms) | 舵机角度 |
|---|---|
| 1.0 | 0° |
| 1.5 | 90° |
| 2.0 | 180° |
需要注意的是,不同品牌的舵机可能会有微小的差异。因此,通常需要查阅舵机的技术文档,或者通过实验来确定特定舵机的PWM脉冲宽度与其角度的精确对应关系。
2.3 舵机的编程控制实例
2.3.1 常用控制器编程接口简介
对于舵机控制,常用控制器编程接口可以是Arduino、树莓派、STM32等开发平台。每个平台都有对应的编程环境和库函数,可以简化PWM信号的生成和调整过程。以Arduino为例,通过使用其提供的 analogWrite() 函数,可以非常方便地生成PWM信号。
下面是一个简单的Arduino代码示例,用于控制舵机转动到指定角度:
#include <Servo.h> // 引入舵机库
Servo myservo; // 创建舵机控制对象
void setup() {
myservo.attach(9); // 将舵机的控制信号线连接到数字口9
}
void loop() {
myservo.write(90); // 将舵机旋转到90度
delay(1000); // 等待1秒
myservo.write(0); // 将舵机旋转到0度
delay(1000); // 等待1秒
myservo.write(180); // 将舵机旋转到180度
delay(1000); // 等待1秒
}
2.3.2 舵机控制程序的编写与调试
在编写舵机控制程序时,首先要确定目标舵机的控制信号要求,然后编写相应的代码来生成所需的PWM信号。调试过程中可能需要反复调整PWM脉冲宽度,以找到最佳的控制参数。调试可以使用串口监视器输出调试信息,或者用LED灯等辅助设备观察输出结果。
调试阶段的代码示例:
#include <Servo.h> // 引入舵机库
Servo myservo; // 创建舵机控制对象
int pulseWidth = 1500; // 初始脉冲宽度
void setup() {
myservo.attach(9); // 将舵机控制信号线连接到数字口9
Serial.begin(9600); // 开启串口通信
}
void loop() {
myservo.writeMicroseconds(pulseWidth); // 发送脉冲宽度信号
delay(20); // 稍作延迟,等待舵机响应
// 输出当前脉冲宽度值
Serial.print("Pulse Width: ");
Serial.println(pulseWidth);
// 根据需要调整脉冲宽度
pulseWidth += 10;
if(pulseWidth > 2400) pulseWidth = 1000;
delay(1000); // 等待1秒后重复
}
在这个代码中, myservo.writeMicroseconds(pulseWidth) 函数用于发送微秒级的脉冲宽度信号给舵机,通过循环逐渐增加脉冲宽度,并通过串口监视器输出当前的脉冲宽度值,从而找到控制舵机的最佳脉冲宽度范围。注意,脉冲宽度的调整范围要在舵机规格允许的范围内,防止舵机损坏。
通过逐步调整和测试,可以获得适合特定舵机的精确控制参数,并编写出稳定可靠的控制程序。
3. HC-05蓝牙模块在电机控制中的应用
3.1 HC-05蓝牙模块基础
3.1.1 蓝牙通信原理与模块介绍
蓝牙技术是一种无线技术标准,用于电子设备间的短距离数据交换。它使用ISM频段的2.4至2.485 GHz的无需授权的无线电波。HC-05是一种常见的蓝牙串口通信模块,广泛应用于无线数据传输和设备远程控制领域。
HC-05模块支持蓝牙2.0/2.1版本,其核心是CSR BC417143蓝牙芯片,它内置了完整的蓝牙协议栈,使得开发者不需要深入了解蓝牙通信细节,即可实现设备间的通信。HC-05模块有多种工作模式,包括从机模式、主机模式和回环测试模式,这使得它在灵活性和易用性上都极具优势。
3.1.2 HC-05模块的配置与通信模式
HC-05模块的配置通常通过AT指令完成。AT指令是一系列预定义的命令,用于设置模块参数,如设备名称、密码、波特率等。例如,使用AT+NAME指令可以设置模块的名称,AT+BAUD指令用于设置通信波特率。
模块有四种主要的工作模式:
- 从机模式(Slave):此模式下模块可以接受来自其他蓝牙设备的连接和数据。
- 主机模式(Master):在主机模式下,模块主动搜索并连接其他蓝牙设备。
- 回环测试模式(Loopback):此模式用于调试,模块可以接收来自自己的数据,并将其回发。
- SPP模式(Serial Port Profile):SPP是一种使用蓝牙技术进行串行通信的标准协议。该模式模拟传统的串行通信接口,允许两个设备通过蓝牙进行串行通信。
3.2 蓝牙模块与微控制器的连接
3.2.1 硬件连接与信号线匹配
为了将HC-05蓝牙模块与微控制器连接,首先需要匹配模块与控制器的信号线。HC-05模块一般有四个引脚:TXD(发送数据)、RXD(接收数据)、VCC(供电)、GND(地线)。
连接时,需要确保TXD与RXD、VCC与GND连接正确。通常,微控制器的TXD引脚连接到HC-05的RXD引脚,微控制器的RXD引脚连接到HC-05的TXD引脚。这种交叉连接确保了发送和接收信号正确传递。
3.2.2 蓝牙模块与微控制器的通信协议
在软件层面上,HC-05蓝牙模块与微控制器的通信基于AT指令集。这些指令用以配置模块和执行特定的操作。当使用STM32微控制器,通常通过串口(USART)与HC-05模块进行通信。
在初始化时,需配置STM32的串口参数,比如波特率、数据位、停止位和校验位,它们必须与HC-05模块的配置相匹配。在STM32中,这些参数设置可以通过HAL库或者直接操作寄存器来完成。初始化配置之后,就可以通过发送AT指令来控制模块的行为。
// 以下是一个简单的代码示例,展示如何初始化STM32的串口
// 以及如何发送AT指令到HC-05蓝牙模块
// 假设已经配置好了STM32的串口,波特率为9600
HAL_UART_Transmit(&huart1, (uint8_t *)"AT+VERSION\r\n", sizeof("AT+VERSION\r\n")-1, 100);
// 以下是接收模块响应的代码
uint8_t rx_buffer[100]; // 接收缓冲区
HAL_UART_Receive(&huart1, rx_buffer, sizeof(rx_buffer), 1000);
// 打印接收到的响应
printf("Received: %s\n", rx_buffer);
3.3 蓝牙控制舵机与直流电机的实践案例
3.3.1 蓝牙通信在舵机控制中的应用
HC-05蓝牙模块可以通过发送特定的AT指令来控制舵机。通过编写控制程序,将接收到的蓝牙信号转换为PWM信号,以驱动舵机进行旋转。
首先,需要设置HC-05模块为从机模式,并与控制设备(如智能手机或平板电脑)配对。然后在控制设备上运行一个专门的应用程序,通过该程序发送PWM信号参数,如脉冲宽度、周期等。
// 以下代码示例展示如何通过蓝牙指令设置PWM参数来控制舵机
// 假定已连接到HC-05蓝牙模块
HAL_UART_Transmit(&huart1, (uint8_t *)"AT+PWM,1.5,20\r\n", sizeof("AT+PWM,1.5,20\r\n")-1, 100);
3.3.2 蓝牙通信在直流电机控制中的应用
在直流电机的控制中,HC-05同样可以通过发送AT指令来调节电机的转速和方向。这通常涉及到PWM信号的生成,通过调整PWM波的占空比来改变电机的电压,从而调节电机的转速。
为了实现这一功能,可以编写一个简单的应用程序,通过蓝牙发送控制命令给HC-05模块。然后模块将这些命令转换为相应的PWM信号,通过连接到微控制器的PWM引脚输出到直流电机的驱动模块。
// 以下代码示例展示如何通过蓝牙指令设置PWM参数来控制直流电机
// 假定已连接到HC-05蓝牙模块
HAL_UART_Transmit(&huart1, (uint8_t *)"AT+PWM,1.0,20,1000\r\n", sizeof("AT+PWM,1.0,20,1000\r\n")-1, 100);
graph LR
A[蓝牙控制应用] -->|发送指令| B[HC-05蓝牙模块]
B -->|AT指令| C[STM32微控制器]
C -->|PWM信号| D[电机驱动器]
D -->|控制信号| E[直流电机]
以上章节通过一系列的讲解和代码示例,展示如何利用HC-05蓝牙模块来实现电机控制。这包括了对模块的基础介绍,以及硬件和软件层面的连接配置,最终通过实践案例展示其在舵机和直流电机控制中的应用。这不仅让读者了解了蓝牙模块的基本功能,还提供了动手实践的具体方法。
4. STM32微控制器编程与应用
4.1 STM32微控制器概述
4.1.1 STM32系列微控制器特点
STM32微控制器系列是由STMicroelectronics公司开发的一系列32位ARM Cortex-M微控制器。STM32具有高性能、低功耗、高集成度和易于使用的特性,使得它们广泛应用于工业控制、医疗设备、汽车电子、消费类产品等领域。该系列微控制器核心采用ARM公司的Cortex-M内核,具有高性能、实时性和低功耗的特点。
在硬件设计方面,STM32微控制器集成了多种通信接口,如I2C、SPI、USART等,同时支持模拟和数字外设,如ADC、DAC、定时器等。这些丰富的外设使得STM32非常适合于复杂的实时嵌入式应用。此外,STM32的高性能、灵活的电源管理选项以及广泛支持的开发工具和生态系统,进一步增强了其吸引力。
4.1.2 STM32开发环境的搭建
开发STM32微控制器通常需要一个集成开发环境(IDE),而最常用的IDE之一是Keil MDK-ARM。Keil MDK提供了全面的调试和仿真工具,而且拥有针对STM32家族的优化。
安装Keil MDK-ARM后,还需要安装对应的软件包来支持STM32微控制器。这包括安装STM32的固件库,这是ST公司为STM32系列微控制器提供的软件组件集合,包括底层驱动、中间件以及应用示例。通过固件库,开发者能够更方便地访问和控制硬件资源,实现特定的功能。
此外,还可以选择使用其他IDE,比如STM32CubeIDE,这是ST官方提供的一个更为集成的开发环境,集成了STM32CubeMX配置工具,能够简化项目配置和初始化代码生成。
4.2 STM32在PWM控制中的应用
4.2.1 PWM信号生成的硬件资源
STM32微控制器中具有专用的定时器(Timer)模块,可以通过配置这些定时器生成PWM信号。定时器具有计数器、预分频器、自动重载寄存器等硬件资源,这些资源为生成精准的PWM波形提供了可能。
PWM信号可以通过定时器的输出比较模式实现,通过设定比较值,定时器在计数值达到比较值时改变输出电平。使用两个输出比较单元可以生成两路反相的PWM信号,这对于驱动某些类型的电机驱动器特别有用。
4.2.2 PWM控制代码的实现
为了实现PWM控制,需要对STM32的定时器进行配置。下面是一个使用STM32 HAL库函数生成PWM信号的代码示例:
#include "stm32f1xx_hal.h"
/* 初始化PWM */
void MX_TIM3_Init(void)
{
TIM_HandleTypeDef htim3;
TIM_OC_InitTypeDef sConfigOC = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = 0;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 1000-1; // PWM频率计算,1MHz计数器频率产生1kHz PWM信号
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim3);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 500; // 初始占空比50%
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_MspPostInit(&htim3);
}
/* 启动PWM信号输出 */
void HAL_TIM_PWM_MspPostInit(TIM_HandleTypeDef *htim)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(htim->Instance==TIM3)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM3 GPIO Configuration
PA6 ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
在上述代码中,我们首先初始化了定时器TIM3,然后配置了它的一个通道(TIM_CHANNEL_1),用于输出PWM信号。通过调用 HAL_TIM_PWM_Start() 函数,可以开始输出PWM信号。
4.3 STM32与其他硬件的集成应用
4.3.1 STM32与HC-05蓝牙模块的集成
STM32与HC-05蓝牙模块的集成涉及到硬件连接和软件编程两个方面。硬件连接时,需要将HC-05模块的TX和RX引脚分别连接到STM32的RX和TX引脚上,同时连接地线和电源。为了确保通信稳定,通常需要通过电平转换模块(如MAX232)进行电平转换。
在软件方面,需要使用STM32的UART(通用异步收发传输器)驱动库来初始化串口,并编写代码实现与HC-05模块的通信。代码示例如下:
#include "stm32f1xx_hal.h"
UART_HandleTypeDef huart3;
/* 初始化串口 */
void MX_USART3_UART_Init(void)
{
huart3.Instance = USART3;
huart3.Init.BaudRate = 9600;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart3);
}
/* 发送数据 */
HAL_StatusTypeDef UART_SendData(uint8_t *pData, uint16_t Size)
{
return HAL_UART_Transmit(&huart3, pData, Size, 1000);
}
/* 接收数据 */
HAL_StatusTypeDef UART_ReceiveData(uint8_t *pData, uint16_t Size)
{
return HAL_UART_Receive(&huart3, pData, Size, 1000);
}
使用上述初始化函数和数据发送/接收函数,可以实现STM32与HC-05模块的基本通信。
4.3.2 STM32与电机驱动器的集成
将STM32微控制器与电机驱动器集成时,PWM信号作为控制电机速度的关键信号,需要从STM32的某个GPIO引脚输出,并连接到电机驱动器的相应输入端。
在软件编程方面,使用HAL库的定时器初始化和PWM配置,如前面介绍的那样,可以将PWM波形输出到电机驱动器。此外,还需要编写控制代码来读取外部信号(如蓝牙模块发送的控制信号),根据这些信号来动态调整PWM波形的参数,实现对电机转速的精确控制。
5. 直流电机控制方法与系统集成
直流电机控制是现代电子系统中常见的需求,尤其是在需要精确控制运动部件的场景下。本章节将详细介绍直流电机的控制原理,并通过实践案例分析如何使用PWM信号进行直流电机的控制。最后,我们将讨论在系统集成与调试过程中的一些关键点。
5.1 直流电机控制原理
5.1.1 直流电机的工作特性
直流电机的基本工作原理是基于电动机原理,即通电导体在磁场中受到力的作用而运动。其核心部件包括定子、转子(电枢)、换向器和电刷。定子产生磁场,转子则在磁场中旋转产生机械能。通过改变供给转子的电流的大小和方向,可以实现转速和旋转方向的控制。
5.1.2 直流电机的速度与转矩控制
直流电机的速度主要由电机两端的电压决定。一般而言,速度与电压成正比。通过增加电压,电机转速上升;减少电压,转速下降。转矩则与电机电流成正比。在负载变化时,通过调节电机的电流可以维持转矩的稳定。
5.2 直流电机的PWM控制实践
5.2.1 PWM控制直流电机的硬件设置
PWM信号可以用于直流电机的速度控制,通常通过调制PWM信号的占空比来实现。硬件设置包括:
- PWM信号发生器 :可以使用微控制器的定时器模块来生成PWM信号。
- 功率驱动模块 :PWM信号直接驱动直流电机可能会导致问题,因此需要一个功率驱动模块(例如H桥驱动器)来放大信号并驱动电机。
- 电机与驱动器的连接 :驱动器的输出连接到直流电机的两个端子。
5.2.2 编写直流电机PWM控制程序
编写程序时,主要任务是设置PWM的周期和占空比。例如,在STM32微控制器中,可以使用HAL库函数配置定时器和PWM。以下是一个简化的代码示例:
#include "stm32f1xx_hal.h"
TIM_HandleTypeDef htim2;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1); // 启动PWM
while (1)
{
// 增加PWM占空比
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 1000);
HAL_Delay(1000);
// 减少PWM占空比
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 500);
HAL_Delay(1000);
}
}
// ... 其他初始化函数 ...
在这个示例中,我们使用了TIM2通道1来生成PWM信号,并通过 __HAL_TIM_SET_COMPARE 函数来调整占空比。
5.3 系统集成与调试
5.3.1 硬件集成设计要点
在进行系统集成时,以下几点是设计的关键:
- 保护电路 :集成时要确保有过载保护电路,避免电机或控制器损坏。
- 滤波电路 :PWM控制可能会引入噪声,通过添加滤波电路可以减少噪声干扰。
- 散热设计 :直流电机运行时会产生热量,必须确保足够的散热以防止过热。
5.3.2 系统调试流程与故障排除
调试流程包括:
- 验证硬件连接 :确保所有的硬件连接正确无误。
- 检查PWM信号 :使用示波器检测PWM信号的质量和占空比是否符合预期。
- 测试程序 :逐步测试并调整PWM信号,观察电机的响应是否符合预期。
在遇到故障时,应按照以下步骤排查:
- 检查电源 :确保提供给电机和控制器的电源是稳定且正确的。
- 验证代码 :检查PWM生成和控制逻辑是否有误。
- 硬件故障 :检查电机和控制器是否有故障。
通过逐步的检查和调试,确保系统能够按照预期稳定运行。
以上便是直流电机控制方法与系统集成的详细介绍,通过对控制原理的理解、硬件设置与软件编程的结合,以及集成调试的策略,能够使直流电机在各种应用中发挥其应有的效能。
简介:该简介解释了利用PWM(脉宽调制)技术控制舵机和直流电机的基本原理。提到了JX360度舵机可以实现全方位控制和高精度调节。使用HC-05蓝牙模块进行无线指令传输,以控制炮台。STM32 F407微控制器用于处理蓝牙数据并生成PWM信号。简介强调了对PWM技术、舵机、蓝牙通信、微控制器编程和直流电机控制等知识点的理解,对初学者而言,这是一个涉及嵌入式系统和机器人技术的综合性学习项目。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 3
3 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)