突破性轮腿机器人开源项目:重新定义智能移动新纪元
Hyun轮腿机器人开源项目为技术爱好者和创客群体提供了一个创新性的智能移动平台,该项目巧妙融合了轮式机器人的高效移动性与腿式机器人的地形适应性,通过ESP32主控、MPU6050陀螺仪和PM3510无刷电机的创新组合,打造出真正具备多环境适应能力的智能机器人系统。## 技术创新开端:当轮子遇见双腿的完美融合在传统机器人设计领域,轮式移动与腿式移动长期处于割裂状态。Hyun项目的诞生彻底打破
Hyun轮腿机器人开源项目为技术爱好者和创客群体提供了一个创新性的智能移动平台,该项目巧妙融合了轮式机器人的高效移动性与腿式机器人的地形适应性,通过ESP32主控、MPU6050陀螺仪和PM3510无刷电机的创新组合,打造出真正具备多环境适应能力的智能机器人系统。
 项目地址: https://gitcode.com/gh_mirrors/hy/Hyun
项目地址: https://gitcode.com/gh_mirrors/hy/Hyun 技术创新开端:当轮子遇见双腿的完美融合
在传统机器人设计领域,轮式移动与腿式移动长期处于割裂状态。Hyun项目的诞生彻底打破了这一界限,通过创新的机械结构和智能控制算法,实现了两种移动模式的有机统一。这种突破性设计不仅继承了轮式机器人在平坦路面上的高速优势,更赋予了机器人跨越障碍、适应复杂地形的能力。
核心特性揭秘:三大技术亮点的协同效应
Hyun轮腿机器人的成功源于三大核心技术的协同工作:首先是基于ESP32的高性能主控系统,负责实时数据处理和运动控制决策;其次是MPU6050陀螺仪提供的精确姿态感知,确保机器人在各种地形下保持稳定;最后是PM3510无刷电机与SimpleFOC驱动器的完美配合,实现平滑而强劲的动力输出。

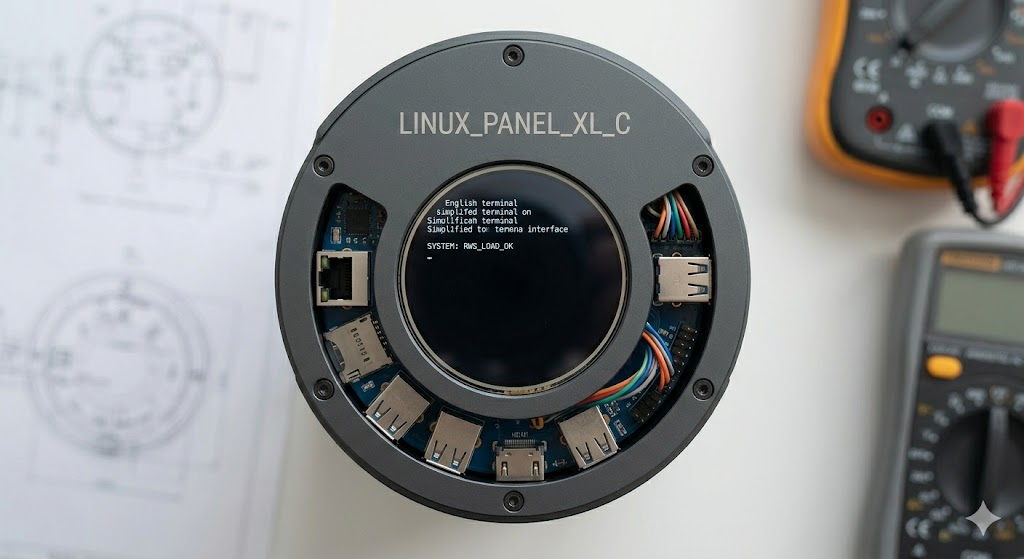
硬件架构深度解析:从PCB设计到系统集成
项目的硬件设计体现了高度的专业性和完整性。主控PCB作为整个系统的神经中枢,集成了传感器接口、电机驱动电路和通信模块。FOC驱动器PCB采用磁场定向控制技术,确保电机在各种负载条件下都能保持高效运行。磁编码器PCB则提供了精确的位置反馈,为闭环控制奠定基础。
应用前景展望:从实验室走向真实世界
轮腿机器人的独特设计使其在多个领域具有广阔的应用前景。在工业巡检领域,它能够轻松应对工厂车间的不平整地面;在应急救援中,可以快速穿越废墟和障碍物;在教育科研方面,则为机器人学教学提供了绝佳的实践平台。

快速上手指南:从零开始的构建之旅
对于初次接触该项目的开发者,建议按照系统化的步骤进行构建。首先熟悉硬件设计文件,包括PCB工程文件和3D打印模型;然后配置开发环境,安装必要的库文件和工具链;最后从基础功能开始,逐步添加更复杂的控制算法。
社区生态建设:开源精神的技术传承
作为完全开源的项目,Hyun不仅提供了完整的硬件设计文件,还包括详尽的固件源码和搭建指南。这种开放共享的理念促进了技术的快速迭代和创新,为整个机器人社区的发展注入了新的活力。

通过精心设计的硬件架构和智能控制算法,Hyun轮腿机器人项目为智能移动技术的发展开辟了新的可能性。无论是专业开发者还是技术爱好者,都能在这个开放平台上找到属于自己的创新空间。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 7
7 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)