ESP32嵌入式开发:从环境搭建到FastLED驱动实战
1. 工程初始化与环境验证
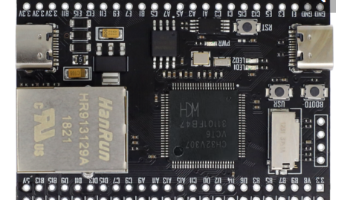
在嵌入式开发中,固件工程的起点并非代码编写,而是构建一个可验证、可复现、可调试的基础环境。当一块HoloCubic硬件板完成焊接并上电后,首要任务是建立从开发主机到目标芯片的完整工具链通路。这一步骤看似简单,实则承载着整个后续开发流程的可靠性基石。
使用PlatformIO配合VS Code构建ESP32工程,其本质是将底层SDK(ESP-IDF)、编译器(xtensa-esp32-elf-gcc)、烧录工具(esptool.py)和调试接口(OpenOCD)进行标准化封装。新建工程时选择“ESP32”作为板型,并非仅指定芯片型号,而是激活了一整套与之匹配的默认配置:包括正确的启动模式(bootloader配置)、分区表(partitions.csv)、SPI Flash参数(flash_mode、flash_size、flash_freq)以及FreeRTOS内核参数(configTOTAL_HEAP_SIZE、configMINIMAL_STACK_SIZE)。这些配置项共同决定了固件如何加载、内存如何分配、外设驱动如何初始化,是任何功能实现的前提。
工程创建完成后,执行首次编译( pio run )成功,标志着本地工具链已正确安装并能解析ESP-IDF头文件、链接静态库、生成符合ESP32 BootROM规范的二进制镜像。此时若编译失败,错误通常指向三类问题:Python依赖缺失(如pyserial、cryptography)、环境变量未设置(如IDF_PATH)、或平台版本不兼容(如PlatformIO Core版本过旧无法支持新版ESP-IDF)。这些问题必须在进入功能开发前彻底解决,否则后续所有调试都将陷入“现象不可信、日志不可靠”的混沌状态。
硬件连接验证是环境闭环的关键一环。将USB线接入开发板,系统识别出 COM4 (Windows)或 /dev/ttyUSB0 (Linux/macOS)设备,仅说明CH340或CP210x USB转串口芯片的驱动已加载,但并未确认ESP32主控本身已被正确识别。真正的验证点在于执行 pio run --target upload 命令时,终端输出是否包含 Connecting..... 、 Chip is ESP32-D0WDQ6 (revision 1) 、 Configuring flash size... 等明确信息。若在此阶段卡死或报错 A fatal error occurred: Failed to connect to ESP32: Timed out waiting for packet header ,则需排查:USB线是否仅支持充电(无数据线)、板载USB转串口芯片是否损坏、ESP32是否处于下载模式(部分板子需手动按住BOOT键再按RST)、或串口被其他进程占用(如已打开的串口助手)。
当 upload 命令成功完成,并在终端显示 Hard resetting via RTS pin... 及 Done 提示时,意味着固件已通过UART0烧录至Flash,并由BootROM自动跳转执行。此时板子上无任何现象是完全预期的状态——因为默认生成的 main.cpp 中, setup() 函数为空, loop() 函数亦为空循环,CPU在初始化完基本外设后即陷入 while(1) ,不驱动任何GPIO,不产生任何中断,不发送任何数据。这种“静默”恰恰证明了基础环境的纯净性与可控性,为后续所有功能注入提供了可靠的起点。
2. 程序结构与执行模型解析
ESP32平台上的Arduino兼容框架(即PlatformIO默认使用的 arduino-espressif32 平台)对标准C/C++程序结构进行了高度封装,其核心在于隐藏了FreeRTOS的复杂性,同时保留了实时操作系统的核心优势。理解 setup() 与 loop() 背后的真正机制,是摆脱“黑盒编程”、走向深度控制的第一步。
标准C程序的入口是 main() 函数,它由C运行时(CRT)在 _start 之后调用,负责初始化全局变量、调用构造函数、最终跳转至用户定义的 main 。而在ESP32 Arduino框架中, main() 函数已被ESP-IDF的 app_main() 所取代。 app_main() 是FreeRTOS任务调度器启动后的第一个用户任务,其内部逻辑清晰划分了两个阶段:首先是硬件抽象层(HAL)与驱动的初始化,包括GPIO、UART、SPI、I2C等外设的寄存器配置;其次是创建两个关键任务—— loopTask 和 idleTask 。 loopTask 正是 loop() 函数的宿主,它被赋予一个固定的优先级(默认为1),并以无限循环方式持续运行;而 idleTask 则由FreeRTOS内核自动创建,用于在无其他任务就绪时执行低功耗操作。
setup() 函数的执行时机,发生在 app_main() 初始化硬件之后、创建 loopTask 之前。它本质上是一个一次性执行的初始化钩子(hook),其代码被直接插入到 app_main() 的主线程上下文中。因此, setup() 中执行的所有操作(如 pinMode() 、 Serial.begin() 、 FastLED.addLeds() )都是在FreeRTOS调度器启动前完成的,此时系统尚无任务切换概念,所有代码均在特权模式下顺序执行。这一特性决定了 setup() 中 严禁 执行任何可能阻塞的操作,例如 delay() (因其底层依赖FreeRTOS的 vTaskDelay() ,而此时调度器未启动)、 Serial.read() (无数据时会无限等待)、或复杂的计算密集型算法。所有耗时操作必须移至 loop() 中,借助FreeRTOS的延时与事件机制来实现。
loop() 函数则运行在一个独立的FreeRTOS任务中。该任务的主体是一个永不退出的 for(;;) 循环,每次迭代结束后,任务会主动调用 yield() (或其等效实现),将CPU时间片让渡给其他同优先级或更高优先级的任务。这意味着 loop() 并非独占CPU,而是与其他任务(如WiFi管理任务、蓝牙协议栈任务、用户自定义任务)共享处理器资源。 delay(500) 在此处是安全的,因为它最终调用的是 vTaskDelay(pdMS_TO_TICKS(500)) ,使当前 loopTask 进入阻塞态,释放CPU给其他任务运行。这种设计使得 loop() 既能实现简单的周期性控制(如LED闪烁),又能无缝融入多任务并发的复杂应用(如同时处理传感器采集、网络通信与本地显示)。
从内存布局角度看, setup() 和 loop() 中的局部变量均分配在各自任务的栈空间中。 setup() 的栈即 app_main() 任务的栈,而 loop() 的栈则是 loopTask 任务的私有栈。全局变量与静态变量则位于 .data 与 .bss 段,由链接器脚本统一规划,生命周期贯穿整个固件运行期。理解这一点,对于避免栈溢出(如在 loop() 中定义超大数组)、管理全局状态(如传感器读数缓存)至关重要。一个典型的实践是:在 setup() 中完成所有“一次配置”,在 loop() 中只做“重复操作”,并将需要跨循环保持的状态(如计数器、标志位)声明为 static 或全局变量。
3. FastLED库集成与WS2812B驱动原理
点亮HoloCubic板载的WS2812B LED,绝非简单的 digitalWrite() 操作,而是一场与严格时序要求的精密博弈。WS2812B采用单线归零码(NRZ)通信协议,其数据帧由50μs高电平起始位、24位RGB数据(每色8位)及至少50μs低电平复位位构成。每一位数据的编码规则为:高电平持续时间为 T0H=0.35±0.15μs (代表逻辑0)或 T1H=0.7±0.15μs (代表逻辑1),随后的低电平时间 T0L=0.8±0.15μs 或 T1L=0.6±0.15μs 共同构成一个完整的位周期 T=1.25±0.3μs 。此精度要求远超普通GPIO翻转能力,必须依赖硬件定时器或DMA进行精确波形生成。
FastLED库正是为解决此难题而生。它并非一个简单的“设置RGB值”封装,而是一个高度优化的、针对不同MCU架构的底层驱动集合。在ESP32平台上,FastLED默认采用 NeoPixelBus 风格的RMT(Remote Control)外设驱动。RMT是ESP32特有的硬件模块,专为红外遥控信号生成与解码设计,但其强大的波形合成能力(支持16级通道、可编程载波、精确到12.5ns的分辨率)使其成为驱动WS2812B的理想选择。RMT通道能将RGB数据流预先加载至内部RAM,并在无需CPU干预的情况下,以硬件级精度自动输出对应的高低电平序列,从而彻底解放CPU资源,确保即使在执行复杂计算或网络通信时,LED显示依然稳定无闪烁。
集成FastLED的过程,实质上是将一个成熟的、经过充分验证的硬件驱动方案引入工程。通过PlatformIO的库管理器添加 FastLED 库,不仅获取了 FastLED.h 头文件与 led_sysdefs.h 等核心源码,更重要的是继承了其针对ESP32 RMT外设的专用驱动实现(位于 platforms/esp/32/clockless_rmt_esp32.h )。在代码中调用 FastLED.addLeds<WS2812B, DATA_PIN, GRB>(leds, NUM_LEDS) ,其内部执行了以下关键步骤:首先,根据 DATA_PIN 查询该引脚所属的GPIO矩阵与RMT通道映射关系;其次,初始化选定的RMT通道,配置其时钟源(通常为80MHz APB clock)、分频系数(以达到所需的12.5ns分辨率)、以及空闲电平;然后,为每个LED预分配一段RAM缓冲区,用于存储其RGB值;最后,注册一个RMT中断服务程序(ISR),用于在数据发送完毕后自动触发回调,通知上层应用“本次更新已完成”。这一系列操作,将开发者从繁琐的寄存器配置与时序计算中彻底解放出来。
NUM_LEDS 与 DATA_PIN 的设定,是驱动成功的物理基础。HoloCubic原理图明确标示,两颗WS2812B LED的数据线(DIN)均连接至ESP32的 GPIO27 引脚。因此, DATA_PIN 必须设为 27 ,任何其他值都将导致信号无法送达LED。 NUM_LEDS 则对应物理LED数量,HoloCubic标准版为1颗,钢铁侠版为2颗。此数值不仅决定了 CRGB leds[NUM_LEDS] 数组的大小,更直接影响FastLED内部缓冲区的分配与RMT DMA传输的长度。若设为 1 而实际连接2颗LED,则第二颗LED将始终显示上一次的残影;若设为 3 而仅有2颗,则第三颗LED因无数据驱动而保持熄灭,虽不影响功能,但浪费内存。因此, NUM_LEDS 必须与硬件设计严格一致。
4. LED控制逻辑与色彩模型实践
WS2812B的RGB色彩控制,本质上是对三个独立PWM通道(红、绿、蓝)的亮度调节。每个通道的亮度值范围为0-255(8位),其中0表示完全关闭,255表示全亮。FastLED库通过 CRGB 结构体将这三个分量封装为一个原子单位,其定义为:
struct CRGB {
union {
struct { uint8_t r; uint8_t g; uint8_t b; };
uint8_t raw[3];
};
};
这种联合体(union)设计允许开发者既可通过 leds[0].r = 255 的方式单独修改红色分量,也可通过 leds[0] = CRGB::Red 一次性赋值全部分量,或利用 leds[0].setRGB(r, g, b) 进行批量设置。理解 CRGB 的内存布局(3字节连续存储,顺序为R-G-B)对于后续使用DMA或自定义协议传输数据至关重要。
基础的闪烁效果(blink)实现,核心在于状态机与时间管理。 leds[0] = CRGB::Red; FastLED.show(); delay(500); 这三行代码构成一个“开”周期,而 leds[0] = CRGB::Black; FastLED.show(); delay(500); 则构成一个“关”周期。 CRGB::Black 等价于 CRGB(0,0,0) ,即三色全灭。 FastLED.show() 是关键指令,它触发RMT外设开始将 leds[] 数组中的最新数据刷新至LED链。此函数是阻塞式的,其执行时间与 NUM_LEDS 成正比(约30μs/LED),因此在 show() 之后立即调用 delay() 是安全的。若需实现更复杂的多LED协同效果(如流水灯),只需在 loop() 中按需修改 leds[i] 的值,并在每次修改后调用 show() 即可。
呼吸灯(Breathing)效果的实现,超越了简单的开关切换,进入了模拟信号的数字近似领域。其数学本质是让LED亮度随时间 t 呈正弦(或三角波、指数衰减)规律变化: brightness = A * sin(ωt + φ) + B 。FastLED提供的 beat8() 函数,正是对此公式的高效整数实现。 beat8(128) 返回一个在0-255间平滑变化的8位值,其周期约为128次 loop() 迭代(具体取决于 loop() 内其他代码的执行时间)。将此值直接赋给 leds[0].red ,即可得到红色通道的呼吸效果。值得注意的是, beat8() 的输入参数并非频率,而是“速度”——数值越大,变化越快。 beat8(64) 比 beat8(128) 慢一倍。
HSV(色调-饱和度-明度)色彩模型为动态变色提供了更直观的控制方式。相较于RGB模型中三色分量相互耦合(改变红色会影响整体亮度与色相),HSV将颜色属性解耦: H (Hue)决定基本色相(0°红,120°绿,240°蓝), S (Saturation)决定色彩纯度(0%为灰度,100%为纯色), V (Value)决定明度(0%为黑,100%为最亮)。 leds[0].setHSV(hue, 255, 255) 固定饱和度与明度,仅让 hue 随 beat8() 变化,即可实现从红→黄→绿→青→蓝→品红→红的完整色环循环。 CRGB::Pink 等预定义颜色,其内部值均为基于RGB模型的常量(如 Pink = CRGB(255, 192, 203) ),可直接赋值使用,但缺乏动态调整能力。
在实际工程中,应避免在 loop() 中直接使用 delay() 进行长时间等待,因其会阻塞整个 loopTask ,影响其他功能(如串口接收、按键扫描)的实时性。更优的实践是采用“状态机+毫秒计时”模式:记录上一次动作的时间戳( unsigned long previousMillis = millis(); ),在 loop() 中持续检查 millis() - previousMillis >= interval ,满足条件则执行动作并更新时间戳。此方法使 loop() 始终保持高响应性,是构建健壮嵌入式应用的基石。
5. 串口调试与日志系统构建
串口(Serial)在嵌入式开发中扮演着无可替代的“神经系统”角色,它不仅是固件与开发者之间的信息桥梁,更是诊断硬件故障、验证算法逻辑、监控系统状态的核心工具。HoloCubic板载的USB转串口芯片(CH340或CP210x),通过 UART0 (GPIO1/TX, GPIO3/RX)与ESP32相连,构成了这条生命线。
Serial.begin(115200) 的调用,其背后是ESP-IDF对 uart_driver_install() 与 uart_param_config() 的深度封装。波特率115200的选择,是平衡传输速率与抗干扰能力的结果:更高的波特率(如921600)虽能加快日志输出,但在长USB线或电磁干扰环境下易出现数据错乱;更低的波特率(如9600)则导致大量日志堆积,无法及时反映系统瞬态。 begin() 的其他参数(如 SERIAL_8N1 )指定了数据格式:8位数据位、无奇偶校验、1位停止位,这是绝大多数串口助手的默认配置,确保兼容性。
Serial.print() 与 Serial.println() 的输出,最终经由 uart_write_bytes() 写入UART0的TX FIFO。此过程是非阻塞的,只要FIFO未满,函数立即返回。但若日志量过大(如在 loop() 中高频打印),FIFO可能溢出,导致部分字符丢失。因此,生产环境中应谨慎使用 println() ,优先采用条件日志( if(DEBUG_MODE) Serial.println(...) )或分级日志(INFO/WARN/ERROR)。一个实用技巧是,在 setup() 中加入 Serial.printf("FW Version: %s, Build: %s\n", __DATE__, __TIME__); ,将编译时间固化到固件中,便于版本追踪。
串口助手(如PuTTY、SecureCRT或PlatformIO自带的Monitor)的配置,必须与固件端严格匹配。除波特率外,还需确认:数据位(8)、停止位(1)、奇偶校验(None)、流控(None)。Windows下若设备管理器中显示为 COM4 ,则串口助手必须选择同一端口号;Linux/macOS下为 /dev/ttyUSB0 。一个常见陷阱是:多个串口助手同时打开同一端口,导致后者无法连接。此外,某些USB转串口芯片在驱动安装后需重启电脑才能被系统完全识别。
在HoloCubic项目中,串口调试的价值体现在多个层面。硬件层面,若 Serial.println("Hello") 无输出,可快速定位为:USB线故障、转串口芯片损坏、ESP32未上电、或 Serial.begin() 调用位置错误(如在 setup() 之前)。软件层面,通过在 loop() 中插入 Serial.printf("Loop count: %d, Sensor value: %d\n", loopCount++, analogRead(A0)); ,可直观验证ADC采样是否正常、 loop() 执行频率是否稳定。更高级的应用是构建简易的命令行接口(CLI),例如监听 Serial 输入,当收到 "led red" 时调用 leds[0] = CRGB::Red; FastLED.show(); ,实现远程控制,这为后续功能扩展(如OTA升级、参数配置)奠定了基础。
6. 模块化代码组织与C++封装实践
将所有代码堆砌在 main.cpp 中,是初学者的便捷之选,却也是项目规模扩大后的灾难之源。HoloCubic的LED控制逻辑,从最初的 blink ,到 breathing ,再到 rainbow ,功能复杂度呈指数增长。此时,遵循模块化设计原则,将相关功能聚类、接口抽象、实现隐藏,便成为工程可维护性的分水岭。
C++的类(class)机制为此提供了天然支持。以LED控制为例,可定义一个 LedController 类:
// LedController.h
#pragma once
#include <FastLED.h>
class LedController {
public:
LedController(uint8_t dataPin, uint8_t numLeds);
void begin();
void setRgb(uint8_t index, uint8_t r, uint8_t g, uint8_t b);
void setHsv(uint8_t index, uint8_t h, uint8_t s, uint8_t v);
void show();
void clear();
private:
uint8_t m_dataPin;
uint8_t m_numLeds;
CRGB* m_leds;
};
此头文件( .h )定义了类的公共接口(API),即使用者需要知道的一切:如何构造对象、如何设置颜色、如何刷新显示。 #pragma once 防止头文件被重复包含, #include <FastLED.h> 声明了对外部库的依赖。所有成员变量( m_dataPin , m_numLeds , m_leds )均声明为 private ,向外部隐藏了实现细节(如 m_leds 是一个动态分配的数组指针)。
实现文件( .cpp )则专注于内部逻辑:
// LedController.cpp
#include "LedController.h"
LedController::LedController(uint8_t dataPin, uint8_t numLeds)
: m_dataPin(dataPin), m_numLeds(numLeds), m_leds(nullptr) {}
void LedController::begin() {
m_leds = new CRGB[m_numLeds]; // 动态分配LED数组
FastLED.addLeds<WS2812B, GRB>(m_leds, m_numLeds);
}
void LedController::setRgb(uint8_t index, uint8_t r, uint8_t g, uint8_t b) {
if (index < m_numLeds) {
m_leds[index].setRGB(r, g, b);
}
}
void LedController::setHsv(uint8_t index, uint8_t h, uint8_t s, uint8_t v) {
if (index < m_numLeds) {
m_leds[index].setHSV(h, s, v);
}
}
void LedController::show() {
FastLED.show();
}
void LedController::clear() {
for (uint8_t i = 0; i < m_numLeds; i++) {
m_leds[i] = CRGB::Black;
}
}
此处, begin() 负责初始化FastLED并分配内存, setRgb() 与 setHsv() 提供两种色彩设置方式, show() 触发刷新, clear() 一键清屏。所有对 CRGB 数组的直接操作均被封装在类内部,外部使用者只需关心“做什么”,无需了解“怎么做”。
在 main.cpp 中使用此模块,变得异常简洁:
#include <Arduino.h>
#include "LedController.h"
LedController ledCtrl(27, 2); // 数据引脚27,2颗LED
void setup() {
Serial.begin(115200);
ledCtrl.begin();
}
void loop() {
static uint8_t hue = 0;
ledCtrl.setHsv(0, hue++, 255, 255);
ledCtrl.show();
delay(15);
}
这种组织方式带来了多重收益: 可测试性 —— LedController 类可在模拟环境中独立单元测试; 可重用性 ——同一份 LedController.cpp/h 可被其他ESP32项目直接复用; 可维护性 ——若需更换LED驱动芯片(如从WS2812B改为APA102),只需修改 LedController.cpp 中的 addLeds 模板参数, main.cpp 无需任何改动; 可扩展性 ——未来添加 fadeToColor() 、 marqueeEffect() 等新功能,只需在类中增加对应方法,接口清晰,职责单一。
一个关键的工程实践是: .h 文件中只包含声明,不包含定义(除非是 inline 函数或模板); .cpp 文件中只包含实现,不暴露内部数据结构。这严格遵循了C++的“分离编译”原则,确保修改实现不会导致整个工程重新编译,大幅提升大型项目的构建效率。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)