Isaac Sim 学习记录三
·
本节主要是添加传感器。
首先点击Stage下面的SimpleRobot,右键创建一个新xform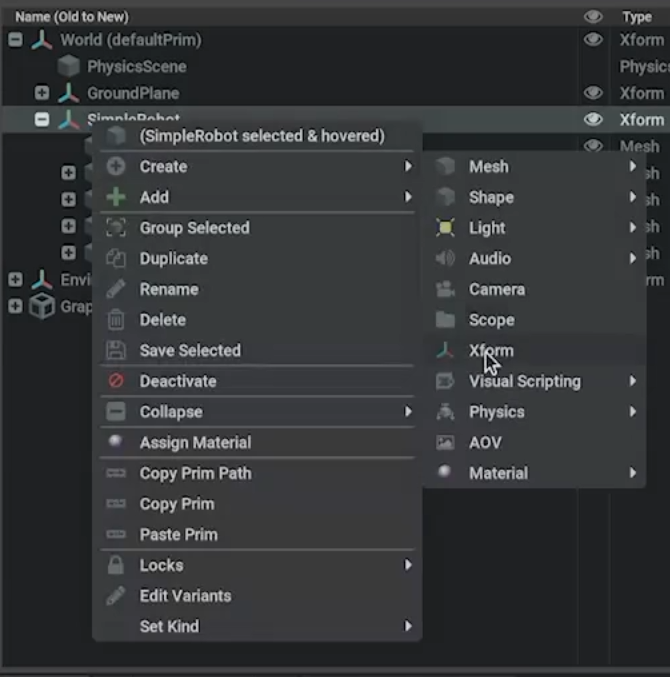
将其改名为你需要的名字。这里是前面传感器(Front_Sensor).
之后在这个目录下创建一个cube,调整大小,放在车头,进行命名,然后赋予所需物理和刚体属性。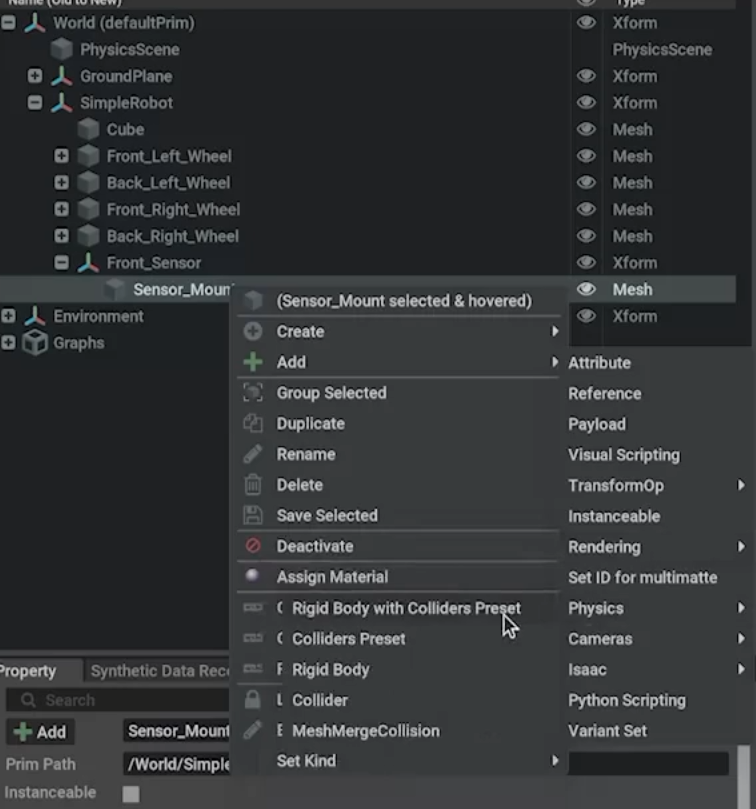
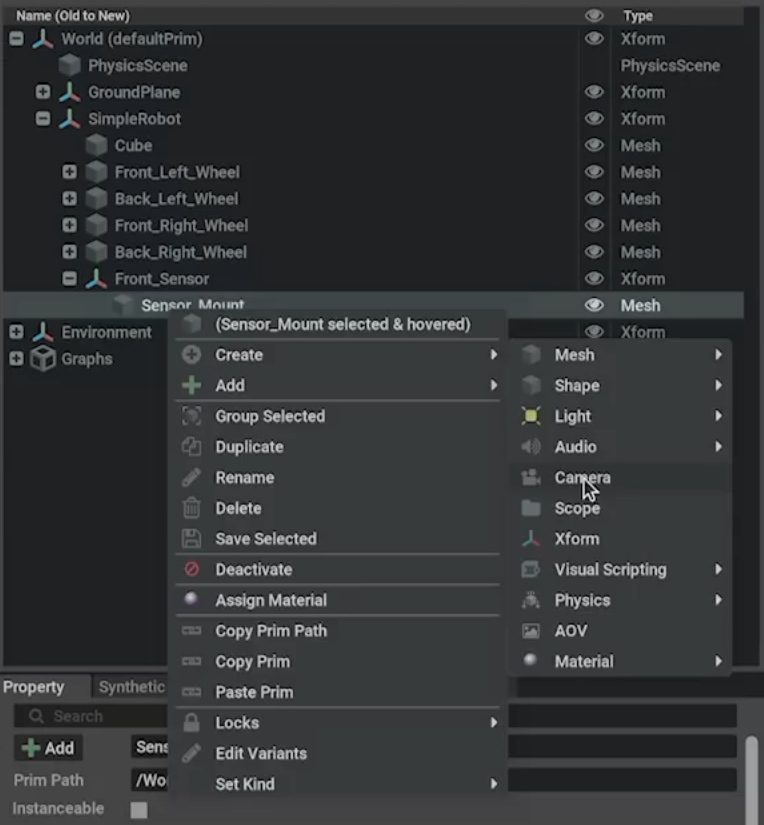
然后可以创建camera
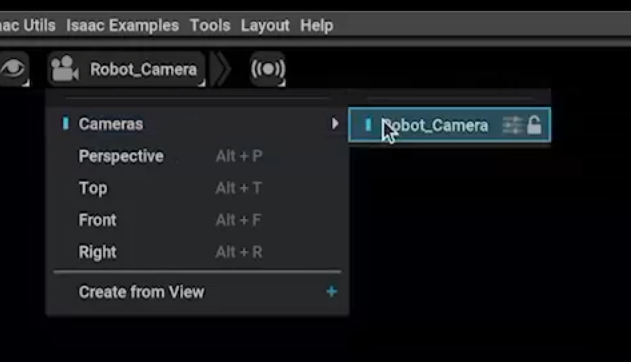
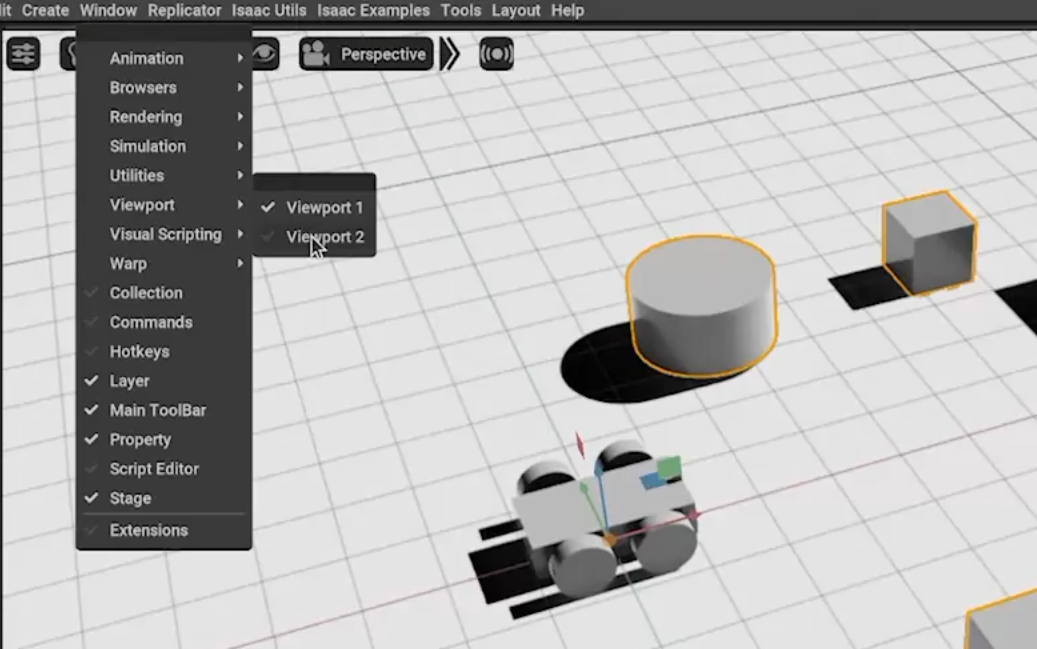
设置完camera后需要调整到自己所需要的方向。同时左上角也可观察你所设置的摄像头视角。
之后你可以在场景中添加各种障碍物,然后传感器可见。下面是可视化双视口。
添加激光雷达传感器
点击Front_Sensor,如图。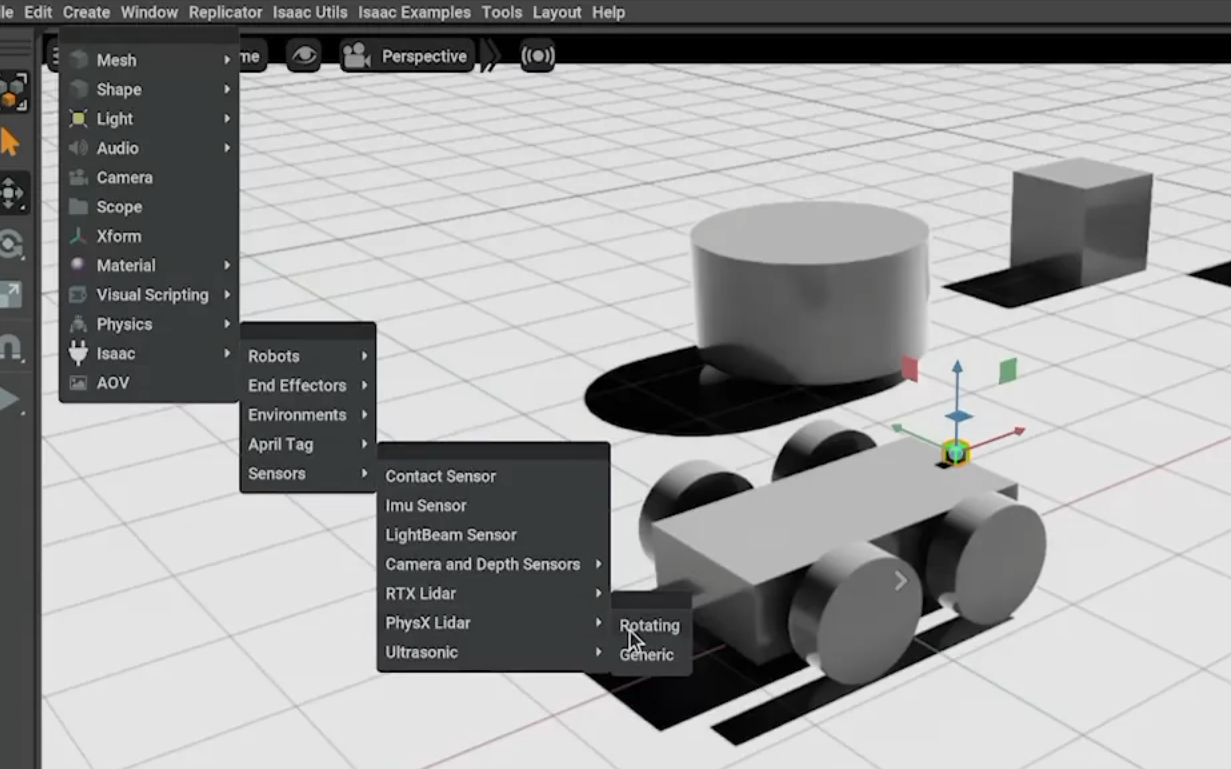
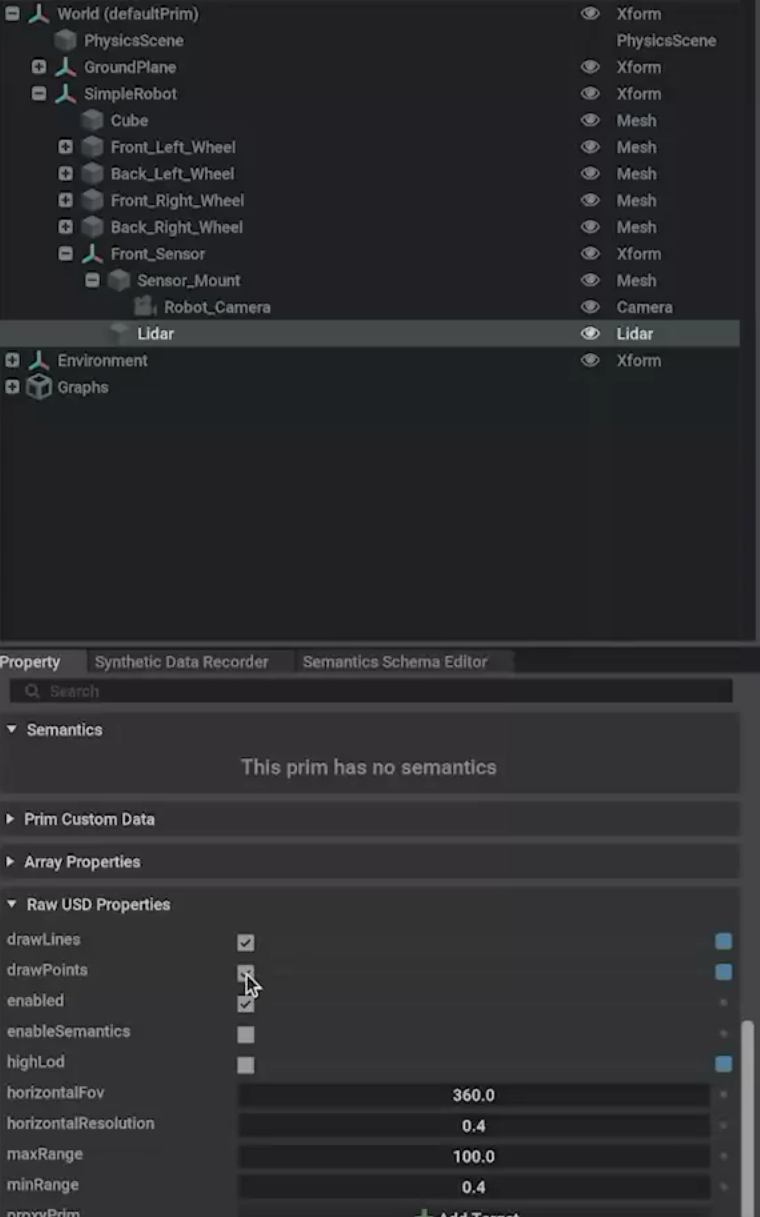
然后点开右侧的Xform,点击Lidar,在Raw USD Properties中配置参数。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)