PID碎碎念,小问题理解
·
 1.为什么绿线会突然的变大,甚至于垂直?
1.为什么绿线会突然的变大,甚至于垂直?
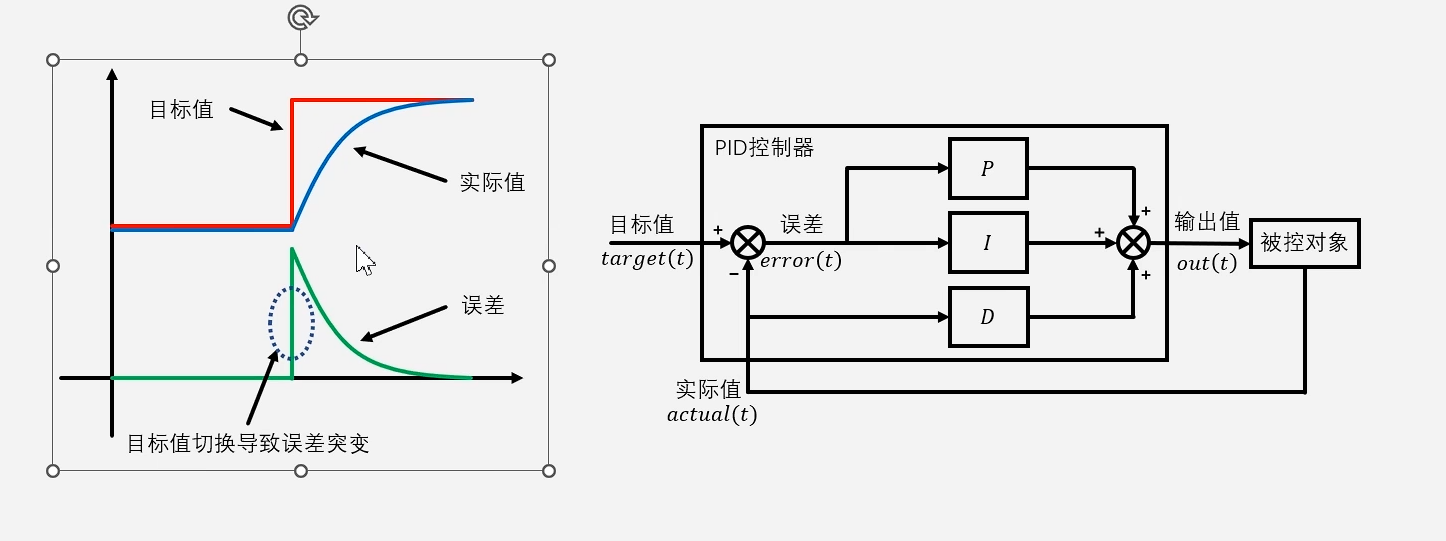
图中绿线代表的是误差信号(error),它之所以会突然变大甚至呈现垂直上升的状态,是因为发生了目标值(Setpoint)的阶跃变化。
以下是详细的逻辑分析:
1. 误差的定义
在控制系统中,误差的计算公式是:
误差(t)=目标值(t)−实际值(t)误差(t)=目标值(t)−实际值(t)
即图中的:
error(t)=target(t)−actual(t)error(t)=target(t)−actual(t)
2. 发生了什么?
- 时刻之前: 系统处于稳定状态,红线(目标值)和蓝线(实际值)重合。此时 目标值=实际值目标值=实际值 ,所以误差(绿线)为 0。
- 突变时刻: 红线(目标值)突然向上跳变(例如从 0 变为 10)。这是一个瞬间的动作,在图表上表现为一条垂直线。
- 系统的惯性: 物理系统是有惯性的,蓝线(实际值)不可能瞬间跟随红线跳变,它只能慢慢爬升。因此,在目标值跳变的那一瞬间,实际值还停留在原来的位置。
3. 为什么绿线会“垂直”变大?
让我们代入那个突变瞬间的数值:
- 目标值:瞬间变成了新的高值(比如 10)。
- 实际值:还没来得及动,还是旧的低值(比如 0)。
- 结果: 误差=10−0=10误差=10−0=10 。
因为目标值的改变是瞬间完成的(时间 tt 没有流逝),而误差直接等于这个巨大的差值,所以在时间轴上,误差也是在同一瞬间从 0 变成了最大值。这就导致了绿线看起来像是一堵墙一样垂直竖了起来。
4. 后续发生了什么?
随着PID控制器开始工作(输出控制量),被控对象开始响应,蓝线(实际值)开始逐渐上升去追赶红线。
- 随着实际值越来越接近目标值,两者的差值(误差)就越来越小。
- 这就是为什么绿线在垂直冲高后,会像滑梯一样平滑地下降,最终趋近于 0。
5.总结
绿线的垂直突变是数学上的必然结果:当输入信号发生阶跃(Step Change)时,由于物理系统的滞后性,瞬时误差必然等于阶跃的幅度。
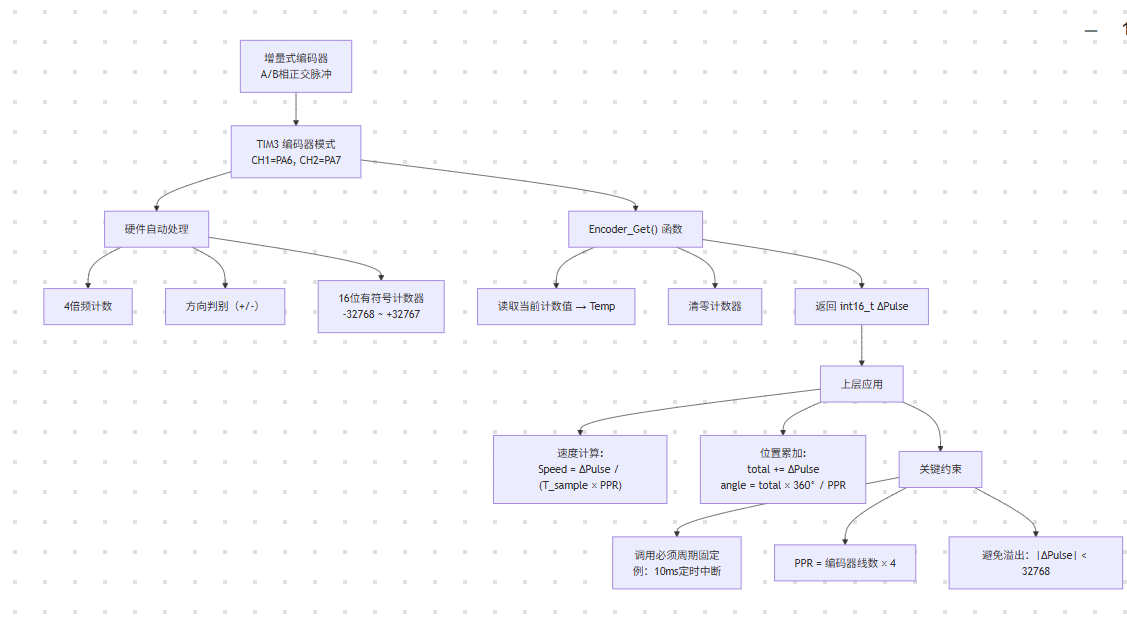
2.编码器的相应流程图

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐



 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)