AVR TWI中断驱动设计:从轮询到状态机的通信效率优化
1. 项目概述:从轮询到中断的TWI通信效率革命
在嵌入式开发,尤其是基于AVR这类8位MCU的项目里,I2C(TWI)总线是连接各类传感器、EEPROM、RTC时钟芯片的血管。早年刚接触时,网上搜到的例程十有八九都是 轮询(Polling)模式 :启动传输后,程序就卡在一个 while 循环里,死等状态寄存器 TWINT 标志置位。对于ATmega16、ATmega48这类主频不高、还要处理其他任务的芯片来说,这种“阻塞式”等待简直是性能杀手。主循环被挂起,实时性无从谈起,多任务更是奢望。后来在几个对时序要求严苛的项目里被坑了几次,我才下定决心,必须把TWI驱动彻底改造为 中断驱动模式 。这套方案在M16和M48上读写PCF8563时钟芯片稳定跑了上万次,核心思想就是 把等待的时间还给CPU ,让通信在后台自动完成。
这篇文章,我就来详细拆解这套中断模式的TWI主机驱动实现。它不仅适用于AVR,其状态机设计思路对任何需要高效管理低速串行总线的MCU都有参考价值。你会看到完整的代码结构、状态机流转的每一个细节,以及我调试过程中踩过的坑和总结的经验。无论你是正在优化旧有代码,还是为新项目选择通信方案,相信这些实战内容都能给你带来直接帮助。
2. TWI中断驱动核心设计与思路拆解
2.1 轮询模式的瓶颈与中断模式的优势
为什么非要折腾中断模式?我们先用一个简单的场景对比。假设你的系统需要每100ms读取一次温湿度传感器(如SHT30),同时还要扫描按键、刷新显示屏。如果使用轮询TWI,伪代码大概是这样的:
void read_sensor(void) {
TWI_Start();
while(!TWI_Start_Transmitted()); // 阻塞等待START完成
TWI_Send_SLA_Write();
while(!TWI_SLA_ACK_Received()); // 阻塞等待地址应答
// ... 发送寄存器地址、重启、读取数据,每一步都在while循环中等待
TWI_Stop();
}
当程序执行到任何一个 while 等待循环时,整个CPU就被“卡住”了。如果此时按键按下,或者显示屏需要刷新,这些事件都无法得到及时响应,除非你用复杂的前后台或RTOS,但这对资源紧张的8位MCU来说负担太重。
中断模式的根本优势在于异步与非阻塞 。它的工作流程完全不同:
- 主程序调用启动函数,配置好目标地址、数据指针和长度后,发送一个START信号就立刻返回。
- TWI硬件在完成START、发送地址、接收/发送数据字节、接收ACK/NACK、产生STOP等每一个关键节点后,都会触发中断。
- 在中断服务程序(ISR)中,一个 状态机 根据当前步骤和硬件状态寄存器(
TW_STATUS)的值,决定下一步该发送什么命令(如发送数据、发送ACK、发送STOP),并设置好下一步的状态。 - 主程序完全不用关心传输过程,只需要检查一个“忙碌”标志位。传输完成后,通过标志位或回调函数通知主程序。
这样,等待总线操作的时间被用来执行其他任务,系统响应速度和整体吞吐量得到质的提升。当然,中断模式引入了状态机的复杂度,对程序的结构化设计要求更高,但这份投入在需要高效利用CPU资源的项目中是绝对值得的。
2.2 状态机:中断驱动程序的灵魂
中断模式的核心就是一个精心设计的状态机。它定义了通信过程的所有可能步骤,以及步骤之间转换的条件。我参考了AVR数据手册中TWI模块的状态图,但将其抽象为更适合程序控制的几个宏观步骤。我定义的步骤( TWI_MRW_STEP_xxx )其实是对多个底层硬件状态的聚合。
例如, TWI_MRW_STEP_SLAW 这个状态,对应的是硬件发送了SLA+W(写地址)并等待应答的这个阶段。当中断触发,我们检查 TW_STATUS ,如果等于 TW_MT_SLA_ACK ,表示从机应答正常,状态机就跃迁到下一步(发送数据地址)。如果收到的是 TW_MT_SLA_NACK ,则表示从机无应答,状态机跳转到失败处理流程。
这种设计将复杂的、依赖硬件的时序逻辑,转化为了清晰的、可枚举的软件状态。它带来了两个巨大好处:一是 代码结构异常清晰 ,中断服务程序就是一个大的 switch-case ,每个 case 处理一个状态,可读性和可维护性极强;二是 错误处理变得系统化 ,在任何一步发生错误(超时、无应答),都能被统一捕获并导向重试或失败处理流程,系统健壮性大大提高。
2.3 全局控制结构体:共享数据的桥梁
中断服务程序(ISR)和主程序之间需要共享数据:从机地址、内存数据指针、当前操作长度、当前状态、忙碌标志、结果标志等。如果使用一堆全局变量,会非常混乱且容易出错。我的做法是定义一个 全局的结构体变量 g_TwiMasterRW ,其类型为 struct TWI_MRW_STEP_MASTER 。
这个结构体是整个TWI中断驱动的控制中心:
uchBusy和uchResult是给主程序看的“信号旗”。主程序发起传输后,只需轮询uchBusy(或结合中断),传输结束通过uchResult知道成败。uchStep是状态机的“指针”,ISR根据它执行相应操作,并在操作完成后更新它。puchByte和uiByteLen构成了一个简单的“数据缓冲区描述符”。主程序传入一个数组指针和长度,ISR就自动按字节顺序读取或写入,无需主程序干预每个字节。uchFailCount实现了 自动重试机制 。一次通信失败(如总线干扰)时,状态机会尝试重新发送START信号,而不是直接宣告失败。只有连续失败超过TWI_MRW_FAIL_MAX次,才最终上报失败。这个细节对提高在噪声环境下的通信可靠性非常关键。
注意:对结构体成员的访问安全 。
g_TwiMasterRW在ISR和主程序中被共同访问。在8位AVR上,对单字节(char)的读写通常是原子的,但像uiByteLen(int型)这类多字节变量,或者在MIPS、ARM等32位平台上,就需要考虑临界区保护。在我的实现中,主程序只在启动传输前完整写入结构体,之后便只读uchBusy和uchResult;ISR是唯一的写入者。这种单向数据流避免了竞争条件。如果你的主程序会在传输中查询其他字段,就需要禁用全局中断进行保护。
3. 代码深度解析与关键实现要点
3.1 宏定义与状态枚举:让魔法数字消失
清晰的代码从拒绝魔法数字开始。我首先用宏定义给每一个操作步骤和状态赋予有意义的名字。
#define TWI_MRW_STEP_START 1
#define TWI_MRW_STEP_SLAW 2
#define TWI_MRW_STEP_DATAADDR 3
#define TWI_MRW_STEP_REPSTART 4
#define TWI_MRW_STEP_SLAR 5
#define TWI_MRW_STEP_DATAR 6
#define TWI_MRW_STEP_DATAW 7
#define TWI_MRW_FAIL 9
为什么从1开始?为什么不直接用0?这里有个小习惯:我通常将0保留给“未初始化”或“空闲”状态。虽然这个驱动里没有明确定义0状态,但留出空白有助于未来扩展。步骤编号的顺序严格遵循一次完整“先写后读”或“只写”操作的时序。
结果和忙碌标志也同理:
#define TWI_MRW_BUSY 1
#define TWI_MRW_NOBUSY 0
#define TWI_MRW_OK 0
#define TWI_MRW_FAIL 20 // 最大失败重试次数
这里有个 关键细节 : TWI_MRW_OK 的值是0,而 TWI_MRW_FAIL 宏的值是20(最大失败次数)。这看起来有点奇怪,因为下面结构体里注释说 uchResult 为0表示成功。实际上, TWI_MRW_FAIL 这个宏名在这里被重用了,它既在 TWI_MRW_FAIL 这个步骤定义中作为状态值(9),又在 TWI_MRW_FAIL_MAX 中作为最大重试次数(20)。更好的做法是将其分开,例如 #define TWI_MRW_STEP_FAIL 9 和 #define TWI_MRW_RETRY_MAX 20 ,以避免混淆。在我的最终代码里已经做了这个修正。
3.2 中断服务程序(ISR):状态机的引擎
整个驱动的核心是 ISR(TWI_vect) 。它就像一个尽职的管家,每次TWI硬件完成一个动作(并触发中断)后,它就根据“任务清单”( uchStep )和“硬件反馈”( TW_STATUS ),决定下一步做什么。
我们以一次典型的“读取多个字节”操作为例,拆解状态流转:
-
TWI_MRW_STEP_START: 主程序发起读请求,状态机从这里开始。ISR检查TW_STATUS == TW_START确认START条件已成功发送到总线。如果成功,则装入从机写地址(SLA+W),并设置TWI控制寄存器TWCR启动发送。 这里有个要点 :TWCR = _BV(TWINT)|_BV(TWEN)|_BV(TWIE);这条语句在清除中断标志(TWINT)的同时,也保持了TWI使能(TWEN)和TWI中断使能(TWIE),为下一次中断触发做好准备。 -
TWI_MRW_STEP_SLAW: 上一步发送的是SLA+W。这里检查是否收到从机的ACK(TW_MT_SLA_ACK)。如果收到,说明从机在线且准备接收,接下来就发送我们要读取的 内部寄存器地址 (uchByteAddr)。对于PCF8563,这可能是一个像0x02(秒寄存器)这样的地址。 -
TWI_MRW_STEP_DATAADDR: 寄存器地址发送成功后,根据最初主程序调用时传入的地址(uchSla)的最低位判断是读还是写操作。如果是读操作((g_TwiMasterRW.uchSla&0x01) == TW_READ),则 发送一个重复起始条件(Repeated START) ,这是I2C协议中组合写地址和读地址进行连续读操作的标准做法。代码中TWCR设置了TWSTA位来产生这个信号。 -
TWI_MRW_STEP_REPSTART: 重复START发送成功后,状态机再次发送从机地址,但这次是读地址(SLA+R)。注意,此时TWDR直接装入g_TwiMasterRW.uchSla,因为uchSla在调用时就已经包含了R/W位(例如0xA1表示读)。 -
TWI_MRW_STEP_SLAR: 从机对读地址应答后,准备接收数据。这里先判断要读取的字节数(uiByteLen)。如果不止一个字节,则发送ACK(TWCR设置TWEA位),表示主机准备继续接收;如果是最后一个字节,则发送NACK(不设置TWEA),通知从机发送停止。 -
TWI_MRW_STEP_DATAR: 这是数据接收循环。每收到一个字节(TW_STATUS == TW_MR_DATA_ACK),就存入puchByte指向的缓冲区,并移动指针。同时递减剩余字节数。只要不是最后一个字节,就继续发送ACK请求下一个字节。当收到最后一个字节(TW_STATUS == TW_MR_DATA_NACK)后,存入数据,然后 发送STOP条件 (设置TWCR的TWSTO位),最后清除忙碌标志,设置操作成功。
失败处理是ISR的另一半大脑 。在任何一个 case 中,如果检测到 TW_STATUS 不是期望的成功状态,都会将 uchStep 设置为 TWI_MRW_FAIL 。在 switch 语句结束后,有一个统一的失败处理区:
if(g_TwiMasterRW.uchStep == TWI_MRW_FAIL) {
g_TwiMasterRW.uchFailCount++;
if(g_TwiMasterRW.uchFailCount >= TWI_MRW_FAIL_MAX) {
// 重试超限,发送STOP,宣告失败
TWCR = _BV(TWSTO)|_BV(TWINT)|_BV(TWEN)|_BV(TWIE);
g_TwiMasterRW.uchResult = TWI_MRW_FAIL;
g_TwiMasterRW.uchBusy = TWI_MRW_NOBUSY;
} else {
// 重试:重新发送START
TWCR = _BV(TWINT)|_BV(TWSTA)|_BV(TWEN)|_BV(TWIE);
g_TwiMasterRW.uchStep = TWI_MRW_STEP_START;
}
}
这个机制非常实用。I2C总线容易受到干扰,偶尔一次无应答(NACK)或总线错误,直接放弃可能导致产品偶发性功能失灵。自动重试几次,往往就能恢复正常通信,极大地增强了鲁棒性。
3.3 主调函数与阻塞等待
中断驱动并不意味着主程序完全不能“等待”。在某些简单场景,或者为了保持API的简洁性,提供一个阻塞式的调用接口是方便的。函数 TwiMasterRW 就扮演了这个角色。
unsigned char TwiMasterRW(unsigned char uchSla, unsigned char uchByteAddr,
unsigned char *puchByte, unsigned int uiByteLen) {
// 1. 初始化控制结构体
g_TwiMasterRW.uchResult = TWI_MRW_FAIL;
g_TwiMasterRW.uchBusy = TWI_MRW_BUSY;
g_TwiMasterRW.uchSla = uchSla;
g_TwiMasterRW.uchByteAddr = uchByteAddr;
g_TwiMasterRW.puchByte = puchByte;
g_TwiMasterRW.uiByteLen = uiByteLen;
g_TwiMasterRW.uchStep = TWI_MRW_STEP_START;
g_TwiMasterRW.uchFailCount = 0;
// 2. 触发START,启动状态机
TWCR = _BV(TWINT)|_BV(TWSTA)|_BV(TWEN)|_BV(TWIE);
// 3. 阻塞等待操作完成
while(g_TwiMasterRW.uchBusy == TWI_MRW_BUSY);
// 4. 返回结果
return (g_TwiMasterRW.uchResult == TWI_MRW_OK) ? TWI_MRW_OK : TWI_MRW_FAIL;
}
这个函数将复杂的异步操作封装成了一个同步调用。主程序调用它,传入参数,然后函数在 while 循环中等待 uchBusy 标志被ISR清除。 这看起来又回到了轮询? 本质不同。这个 while 循环是在等待一个由ISR在 微秒级 内完成的标志位,而轮询模式是在等待硬件操作(可能持续几十到几百微秒)。在此期间, 全局中断是使能的 ,所以其他中断(定时器、外部中断等)依然可以得到响应,系统并没有完全死等。当然,如果你有更复杂的多任务需求,完全可以不调用这个阻塞函数,而是自己基于 uchBusy 标志在主循环中管理状态,实现真正的非阻塞调用。
4. 移植与适配实操指南
4.1 硬件初始化:时钟与上拉电阻
在调用任何TWI函数之前,必须正确初始化硬件。这主要包括两部分:设置TWI总线时钟频率和配置GPIO。
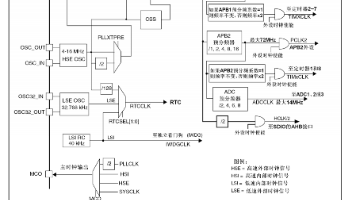
1. 设置TWI比特率寄存器(TWBR) TWI的时钟频率由MCU系统时钟( F_CPU )和 TWBR 值决定。公式为: SCL频率 = F_CPU / (16 + 2 * TWBR * PrescalerValue) 。其中 PrescalerValue 由TWSR寄存器的预分频位设定,通常为1。 例如,在 F_CPU = 8MHz ,目标 SCL = 100kHz ,预分频为1的情况下: TWBR = ((F_CPU / SCL) - 16) / (2 * Prescaler) = ((8000000 / 100000) - 16) / 2 = (80 - 16) / 2 = 32 代码中应这样设置:
void TWI_Init(void) {
// 设置比特率寄存器,产生约100kHz的SCL时钟(在8MHz系统时钟下)
TWBR = 32;
// 设置预分频为1 (TWPS1:0 = 00)
TWSR &= ~(_BV(TWPS1) | _BV(TWPS0));
// 使能TWI模块
TWCR = _BV(TWEN);
}
务必根据你的实际系统时钟计算正确的 TWBR 值 ,过高的速率可能导致通信不稳定。
2. GPIO配置与上拉电阻 AVR的TWI引脚(SCL和SDA)通常是开漏输出。这意味着它们可以主动拉低线路,但无法主动拉高,需要外部上拉电阻将总线拉至高电平。标准I2C总线规范要求上拉电阻的阻值根据总线电容和速度选择,通常在4.7kΩ到10kΩ之间。
重要提示 :即使MCU内部可以配置上拉电阻,也 强烈建议使用外部物理上拉电阻 。内部上拉电阻值较大(通常20kΩ-50kΩ),在标准速度(100kHz)或快速模式(400kHz)下,可能无法提供足够快的上升沿,导致波形畸变和通信失败。对于高速模式(1MHz以上),则需要更小的上拉电阻(如1kΩ)和更精细的布局布线。
4.2 适配不同型号AVR与编译器
我提供的代码在ATmega16和ATmega48上测试通过,它们都属于经典AVR系列。对于其他AVR型号(如ATmega328P、ATtiny系列等),移植时需要注意以下几点:
- 中断向量名称 :代码中
ISR(TWI_vect)是AVR-GCC(GCC-AVR)编译器的标准写法。如果你使用其他编译器(如IAR、CVAVR),中断向量的写法可能不同。例如在IAR中,可能需要#pragma vector=TWI_vect和__interrupt void TWI_ISR(void)。 - 寄存器与位定义 :
TWCR、TWDR、TWBR、TWSR、TWINT、TWEN、TWIE、TWSTA、TWSTO、TWEA这些寄存器和位定义在标准AVR头文件(如<avr/io.h>)中通常是统一的。但请务必核对具体型号的数据手册,确认寄存器地址和位位置。 - 状态码宏定义 :
TW_START、TW_MT_SLA_ACK等状态码宏定义在<util/twi.h>头文件中。这个头文件是AVR-Libc的一部分,通常会自动包含。确保你的开发环境包含了正确的库文件。 - 系统时钟 :如前所述,
TWBR的计算严重依赖F_CPU的定义。确保在你的项目Makefile或IDE设置中正确定义了F_CPU(例如-DF_CPU=8000000UL),并且与实际MCU的时钟源和熔丝位设置一致。
4.3 与具体从设备(如PCF8563)的对接
驱动层是通用的,但与应用层对接需要了解具体从设备的协议。以PCF8563时钟芯片为例,其7位器件地址是 0x51 。读操作时,R/W位为1,所以SLA+R是 0xA3 ( 0x51 << 1 | 0x01 );写操作时,SLA+W是 0xA2 。
一个读取当前时间的函数可能如下所示:
unsigned char PCF8563_ReadTime(void) {
unsigned char data[7]; // 秒、分、时、日、星期、月、年
unsigned char slave_addr = 0xA3; // PCF8563的读地址
unsigned char reg_addr = 0x02; // 起始寄存器地址:秒
// 调用通用TWI读函数,从0x02寄存器开始连续读取7个字节
if(TwiMasterRW(slave_addr, reg_addr, data, 7) == TWI_MRW_OK) {
// 成功,处理data中的数据(注意PCF8563数据格式是BCD码)
g_second = bcd_to_dec(data[0] & 0x7F); // 屏蔽无效位
g_minute = bcd_to_dec(data[1] & 0x7F);
// ... 解析其他字段
return 1;
} else {
// 处理错误,例如记录日志或使用默认值
return 0;
}
}
关键在于理解从设备的寄存器映射、数据格式(通常是BCD码)以及可能的控制位。将这些细节封装在设备专属的函数里,主程序只需要调用 PCF8563_ReadTime() ,完全不用关心底层TWI是如何工作的,实现了很好的分层。
5. 调试技巧与常见问题排查实录
5.1 基础调试:没有示波器怎么办?
调试I2C通信,逻辑分析仪或带I2C解码功能的示波器是终极武器。但如果没有这些设备,可以依靠一些“土办法”和MCU本身的资源。
- 利用LED和串口打印状态 :在ISR的每个关键状态切换点,或者失败处理分支,翻转一个GPIO引脚(接LED)或通过串口发送一个特定字符。通过观察LED的闪烁模式或串口数据,可以判断状态机卡在了哪一步。例如,在START成功时让LED亮,SLA+W成功时让LED灭,这样就能看到通信是否成功开始了。
- 检查
TW_STATUS寄存器 :在失败处理中,可以将TW_STATUS的值通过串口打印出来。AVR的<util/twi.h>头文件中定义了所有状态码的宏,对比这个值就能知道具体是哪个环节出了问题(如0x38表示在发送SLA+R或SLA+W时丢失仲裁,0x20表示发送SLA+W后收到NACK)。 - 软件模拟I2C作为对比 :如果硬件TWI完全不通,可以临时写一个简单的GPIO模拟I2C(软件I2C)函数来操作同一个从设备。如果软件模拟能通,那问题很可能出在TWI硬件初始化(时钟、GPIO模式)或驱动代码上;如果软件模拟也不通,那就要检查硬件连接(上拉电阻、电源)、从设备地址是否正确。
5.2 典型问题与解决方案速查表
下表总结了我调试过程中遇到的最常见问题及其排查思路:
| 问题现象 | 可能原因 | 排查步骤与解决方案 |
|---|---|---|
| 通信完全无反应,从设备无应答 | 1. 从设备地址错误。 2. 从设备未上电或损坏。 3. SDA/SCL线路断开、短路或接反。 4. 上拉电阻缺失或阻值过大。 5. TWI模块时钟(SCL)设置过快。 |
1. 用逻辑分析仪抓取波形,看主机发出的地址是否与从设备手册一致(注意7位地址和8位带R/W位的区别)。 2. 测量从设备VCC电压,确认其已供电且复位正常。 3. 万用表检查SDA、SCL对地、对VCC是否短路,与MCU引脚是否连通。 4. 确保SCL和SDA线上都有上拉电阻(通常4.7kΩ到VCC)。 5. 降低 TWBR 值,尝试用最低速度(如10kHz)通信。 |
| 偶尔通信失败,特别是长时间运行后 | 1. 电源噪声或地线干扰。 2. 总线电容过大,导致上升沿太慢。 3. 软件中缺少错误恢复机制。 4. 中断服务程序执行时间过长,影响了其他关键中断。 |
1. 在MCU和从设备的电源引脚就近加退耦电容(如100nF)。 2. 检查总线布线,避免过长或靠近噪声源。可以尝试减小上拉电阻值(如从10kΩ换为2.2kΩ)。 3. 本驱动中的自动重试机制就是为了解决这个问题 。检查 TWI_MRW_FAIL_MAX 设置是否合理(我设为20次)。 4. 优化ISR代码,只做最必要的操作。避免在ISR内进行复杂计算或调用可能阻塞的函数。 |
| 只能写入,不能读取 | 1. 读操作时序错误,特别是重复起始条件(Repeated START)没处理好。 2. 读取最后一个字节后,主机没有发送NACK和STOP条件。 3. 从设备不支持连续读,或需要特殊的命令序列。 |
1. 仔细对照数据手册和代码,确认在发送完寄存器地址后,是否正确地发送了 REP_START ,然后发送了 SLA+R 。 2. 确认在 TWI_MRW_STEP_SLAR 和 TWI_MRW_STEP_DATAR 状态中,对最后一个字节的处理是发送NACK和随后的STOP。 3. 查阅从设备数据手册,有些设备在连续读前需要发送一个特定的“停止”或“命令”字节。 |
在状态 TWI_MRW_STEP_START 或 TWI_MRW_STEP_REPSTART 卡住 |
1. 总线被锁死(SCL或SDA被意外拉低)。 2. 其他主机(如另一个MCU)正在占用总线。 3. TWI硬件初始化不正确,或 TWEN 位未被使能。 |
1. 尝试在初始化时或失败后,先发送一个STOP条件( TWCR = _BV(TWSTO)... )再发送START,这有助于清除总线锁死。 2. 如果是多主机系统,需要实现仲裁和时钟同步机制,本驱动是单主机模式。 3. 检查 TWI_Init() 函数是否被正确调用, TWCR 的 TWEN 位是否被置1。 |
| 中断似乎没有触发 | 1. 全局中断未开启( sei() )。 2. TWI中断使能位 TWIE 未设置。 3. 中断向量表配置错误(对于某些Bootloader或特殊配置的MCU)。 |
1. 在主函数初始化部分,确保调用了 sei() 。 2. 在启动传输的 TWCR 设置中(如`_BV(TWINT) |
5.3 高级调试:逻辑分析仪实战
当软件调试手段用尽时,逻辑分析仪是无可替代的。以Saleae Logic为例,连接好SCL、SDA和地线,设置正确的采样率(至少4倍于SCL频率)。
- 抓取一次完整通信 :触发一次读或写操作,抓取波形。在分析仪软件中启用I2C解码器,设置正确的地址格式(7位)。你应该能看到清晰的START、地址+W、寄存器地址、Repeated START、地址+R、数据字节、ACK/NACK、STOP。
- 对比异常波形与正常波形 :
- 看电平 :SCL和SDA的高电平是否达到VCC(如3.3V或5V)?上升沿是否陡峭?如果上升沿缓慢呈弧形,说明上拉电阻太大或总线电容太大。
- 看时序 :测量SCL低电平和高电平的时间,计算实际频率是否与设定值相符。SCL低电平期间,SDA数据是否稳定?
- 看ACK :在每个字节(包括地址字节和数据字节)的第9个时钟脉冲,SDA线是否被从机拉低(ACK)?如果一直为高(NACK),说明从机没有响应。
- 看干扰 :总线上是否有明显的毛刺?这可能是电源噪声或电磁干扰。
- 锁定问题 :如果解码器显示主机发送的地址是
0xA2,但从设备地址是0x68(7位),那显然是地址错误。如果看到主机发送了STOP,但从机在STOP后还在拉低SDA,那可能是从机故障或驱动能力问题。
调试是一个假设-验证的过程。根据波形提供的信息,结合代码逻辑,往往能快速定位到问题的根源。这套中断驱动的TWI代码,由于其清晰的状态机结构,在结合逻辑分析仪调试时尤其方便,因为你可以精确地在代码中设置断点或标志,与捕捉到的硬件波形一一对应起来。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 7
7 0
0- 0



 已为社区贡献67条内容
已为社区贡献67条内容

所有评论(0)