深入解析S12PWM模块:从时钟配置到16位级联的嵌入式电机控制实战
1. 项目概述与PWM核心价值
在嵌入式开发,尤其是电机控制、LED调光、开关电源这些对功率和精度有要求的领域,脉宽调制(PWM)技术绝对是工程师手中的一把利器。简单来说,PWM就是通过快速开关一个数字信号,并精确控制其“开”和“关”的时间比例(即占空比),来等效地输出一个可变的平均电压或电流。这听起来简单,但要在微控制器(MCU)里稳定、高效、灵活地实现它,背后却有一套精密的硬件架构和配置逻辑。
我接触过不少MCU的PWM模块,从简单的8位定时器到复杂的专用电机控制PWM。今天想和大家深入聊聊Freescale(现NXP)S12系列微控制器里的一个经典PWM模块:S12PWM8B8CV2。这个模块在汽车电子和工业控制中应用非常广泛,其设计思路很具代表性。很多人拿到数据手册,看到一堆寄存器可能会发怵,但其实只要理清了时钟树、对齐模式和级联逻辑这几条主线,用起来就会得心应手。本文不会照本宣科地翻译手册,而是结合我实际在 无刷电机驱动 和 数字电源 项目中的踩坑经验,带你拆解这个PWM模块的三大核心:时钟配置如何决定频率精度、对齐模式如何影响波形对称性与谐波、以及如何通过通道拼接获得16位分辨率来满足精密控制的需求。
2. PWM模块架构与时钟系统深度解析
PWM模块的稳定性和精度,其根基在于时钟系统。S12PWM8B8CV2模块的时钟设计非常灵活,但也因此带来了一些容易混淆的配置点。理解它,是避免输出频率偏差和波形抖动的第一步。
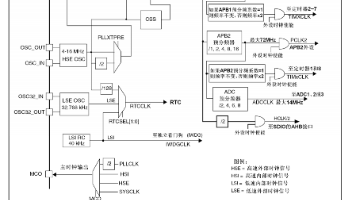
2.1 主时钟源与预分频器
模块的时钟源头是系统总线时钟(通常标记为E时钟)。这个时钟首先经过一个预分频器,生成两个基础时钟:Clock A和Clock B。预分频值可以通过寄存器配置,常见的有1、2、4、8、16等分频比。这意味着你可以为不同的PWM通道组选择不同频率的基准时钟,这在需要同时产生高频(如开关电源)和低频(如舵机控制)PWM波形的应用中非常有用。
注意 :数据手册中默认的复位配置是,通道0、1、4、5使用Clock A,通道2、3、6、7使用Clock B。这个默认分配是基于硬件布线固定的,除非有特殊需求,遵循这个分配可以简化配置并避免潜在的信号完整性问题。
2.2 可编程时钟分频器(PWMSCLA/B)与时钟SA/SB
这是S12 PWM模块的一个特色设计,也是精度调节的关键。Clock A和Clock B并不是直接供给各个通道的,它们各自连接了一个8位递减计数器和一个固定的2分频器。
工作流程如下 :
- 用户向
PWMSCLA寄存器写入一个比例值(Scale Value)。 - Clock A驱动一个8位递减计数器,该计数器的初始值就是
PWMSCLA的值。 - 计数器从设定值开始递减,当减到1时,会产生一个脉冲,并立即自动重载
PWMSCLA的值,开始下一轮计数。 - 这个脉冲序列再经过一个固定的2分频电路,最终得到供通道使用的
Clock SA。
因此, Clock SA 的最终频率公式为: Clock SA = Clock A / (2 * PWMSCLA) 。这里有一个 极易出错 的边界情况:当 PWMSCLA 被写入 $00 时,硬件将其视为满量程值256,而非0。所以此时分频系数是 2 * 256 = 512 。 Clock SB 的产生原理与 Clock SA 完全相同,由 PWMSCLB 寄存器控制。
举个例子 :假设总线时钟E=24MHz,Clock A配置为E/4=6MHz。如果设置 PWMSCLA = $FF (十进制255),那么 Clock SA = 6MHz / (2 * 255) ≈ 11.76kHz 。如果设置 PWMSCLA = $01 ,则 Clock SA = 6MHz / (2 * 1) = 3MHz 。可以看到,通过 PWMSCLA ,我们可以在一个很宽的范围内对时钟进行精细的二次分频。
实操心得 :在电机控制中,PWM频率的选择需要在开关损耗、电流纹波和系统响应速度之间权衡。例如,对于小型直流有刷电机,10-20kHz是常见选择,以避免可闻噪音。通过计算
PWMSCLA的值,可以精确地将时钟调到目标频率附近。记住,写入PWMSCLA/B会立即重载计数器,但手册也警告,在通道运行时修改它可能导致输出波形出现“毛刺”或周期不规则。最佳实践是在初始化阶段、通道禁用(PWMEx=0)时,配置好所有时钟相关寄存器。
2.3 通道时钟选择
每个PWM通道(0-7)都可以独立选择四路时钟源中的一路:Clock A, Clock SA, Clock B 或 Clock SB。选择是通过 PWMCLK 和 PWMCLKAB 寄存器中的 PCLKx 和 PCLKABx 控制位完成的。
通道时钟选择逻辑表 :
| 控制位组合 | 选择的时钟源 |
|---|---|
PCLKABx=0 , PCLKx=0 |
Clock A |
PCLKABx=0 , PCLKx=1 |
Clock SA |
PCLKABx=1 , PCLKx=0 |
Clock B |
PCLKABx=1 , PCLKx=1 |
Clock SB |
这种设计提供了极大的灵活性。例如,你可以让所有通道使用高精度的SA/SB时钟,也可以让部分需要高频率的通道直接使用A/B时钟,而另一部分需要极低频率的通道使用经过大幅分频的SA/SB时钟。
避坑指南 :和修改分频寄存器一样,在PWM通道运行时切换其时钟源(
PCLKx或PCLKABx位)同样会导致输出波形出现不规则现象。务必在通道禁用状态下进行时钟源切换。一个可靠的初始化顺序是:1) 禁用所有PWM通道;2) 配置预分频器、PWMSCLA/B;3) 配置各通道的PWMCLK和PWMCLKAB;4) 配置周期、占空比、对齐模式;5) 最后再使能通道。
3. PWM通道定时器:核心工作机制
时钟系统为PWM提供了“心跳”,而每个通道的定时器则是产生具体波形的“心脏”。S12的每个PWM通道都拥有一个独立的8位计数器( PWMCNTx )、一个周期寄存器( PWMPERx )和一个占空比寄存器( PWMDTYx )。
3.1 计数器工作模式与波形生成
计数器在所选时钟源的驱动下工作。其行为模式(递增或递增/递减)由输出对齐模式决定,这点我们稍后详谈。核心比较逻辑如下:
- 周期匹配 :当计数器的值与
PWMPERx寄存器匹配时,标志着一个PWM周期的结束。此时,计数器会根据模式进行复位或转向。 - 占空比匹配 :当计数器的值与
PWMDTYx寄存器匹配时,PWM输出电平会根据极性设置发生翻转。
输出电平的初始状态由极性位 PPOLx 控制:
PPOLx = 1:波形周期起始于高电平。当计数器达到PWMDTYx时,输出翻转为低电平,并保持到周期结束。PPOLx = 0:波形周期起始于低电平。当计数器达到PWMDTYx时,输出翻转为高电平,并保持到周期结束。
3.2 双缓冲机制与寄存器更新策略
PWMPERx 和 PWMDTYx 寄存器都采用了双缓冲结构。这意味着你写入的值首先进入一个缓冲区,不会立即影响当前正在生成的波形。新的值只有在以下条件之一满足时,才会从缓冲区加载到生效寄存器中:
- 当前有效周期结束。
- 软件直接写入计数器寄存器(
PWMCNTx)。 - 该通道被禁用(
PWMEx=0)。
这个机制至关重要,它确保了PWM输出的连续性。你可以随时在后台更新占空比或周期值,而不会在当前周期中间产生一个畸变的脉冲。这对于需要平滑改变电机速度或LED亮度的应用来说是必须的。
如何强制立即更新 :如果你需要新的占空比立即生效(例如在响应紧急事件时),可以采用“写入占空比寄存器后紧接着写入计数器寄存器”的方法。写入计数器会将其复位为 $00 ,并同时触发缓冲区到生效寄存器的加载。但手册明确警告: 这可能导致产生一个不规则的PWM周期 。例如,如果在新周期开始时旧计数器值并非从0开始,可能会产生一个极短或极长的脉冲。在要求严格的电机控制中,这种瞬态脉冲可能引发过流。因此,除非必要,应尽量避免强制立即更新,而是利用双缓冲机制在周期边界自然切换。
3.3 计数器操作与使能/禁用
- 读取计数器 :你可以随时读取
PWMCNTx来获取当前计数值,这不会影响计数过程。这在需要同步外部事件与PWM相位时很有用。 - 写入计数器 :向
PWMCNTx写入任何值都会导致:1) 计数器复位到$00;2) 计数方向设为递增;3) 立即加载双缓冲的周期和占空比值;4) 输出根据PPOLx设置为初始状态。 在通道启用时写入计数器,同样会导致一个不规则周期 。 - 通道使能(PWMEx=1) :使能后,计数器从其当前值(可能是上次停止时的值)开始继续计数。这意味着如果你希望每次启用都从一个全新的、确定的波形开始, 必须在使能前先向计数器写入一个值(通常是0) ,以将其复位到已知状态。
- 通道禁用(PWMEx=0) :计数器停止,输出保持在其最后的状态(取决于具体硬件实现,可能为高阻、低或高)。禁用时写入周期寄存器为0,会导致计数器在下一个时钟沿复位。
4. 对齐输出模式详解与选择策略
S12 PWM模块支持两种输出对齐模式:左对齐和中心对齐。这两种模式不仅仅是波形外观不同,其谐波特性、对电机噪音和电磁干扰(EMI)的影响也截然不同。
4.1 左对齐输出模式
在此模式下( CAEx = 0 ),计数器配置为单纯的递增计数器。它从0开始计数,一直增加到 PWMPERx - 1 。当与 PWMDTYx 匹配时,输出翻转;当与 PWMPERx 匹配时,计数器复位到0,并开始一个新的周期。
关键公式 :
- 输出频率 :
Fpwm = Fclock / PWMPERxFclock是该通道选择的时钟源频率(A, SA, B, SB之一)。
- 占空比 :
- 当
PPOLx = 0(起始低电平):Duty Cycle = [(PWMPERx - PWMDTYx) / PWMPERx] * 100% - 当
PPOLx = 1(起始高电平):Duty Cycle = [PWMDTYx / PWMPERx] * 100%
- 当
左对齐模式的特点 :
- 波形 :脉冲总是从周期开始处启动。所有通道的脉冲上升沿(或下降沿,取决于极性)在时间上是同步的。
- 优点 :逻辑简单,计算方便。在多通道需要严格同步触发(例如全桥驱动电路的上下管)时,左对齐是首选,因为它能保证所有通道的动作沿对齐,减少死区时间计算的复杂性。
- 缺点 :谐波能量主要集中在开关频率及其倍数上,EMI频谱存在明显的尖峰。
4.2 中心对齐输出模式
在此模式下( CAEx = 1 ),计数器作为递增/递减计数器工作。它从0开始递增,达到 PWMPERx 后改变方向开始递减,回到0后完成一个完整周期,并开始下一个周期。因此,一个有效的周期长度是 PWMPERx * 2 个时钟计数。
关键公式 :
- 输出频率 :
Fpwm = Fclock / (2 * PWMPERx)- 注意: 在相同
PWMPERx值和时钟源下,中心对齐模式的输出频率是左对齐模式的一半 。
- 注意: 在相同
- 占空比 :计算公式与左对齐模式完全相同。因为占空比定义为高电平时间与整个周期时间的比值,而计数器在递增和递减过程中会两次穿越
PWMDTYx值,从而在周期中心形成一个对称的脉冲。
中心对齐模式的特点 :
- 波形 :脉冲位于周期的中心,波形对称。
- 优点 :
- EMI性能优异 :由于开关动作发生在周期中心,其谐波能量被分散到开关频率的两侧,有效降低了峰值EMI。这在汽车电子和需要通过EMC认证的产品中至关重要。
- 电机运行更平稳 :对于电机驱动,中心对齐PWM产生的电流纹波更小,能降低电机的转矩脉动和可闻噪音,特别是低速时效果明显。
- 缺点 :逻辑相对复杂,计算频率和占空比时需要注意
PWMPERx代表的是峰值计数值,而非周期计数值。多通道的脉冲中心是对齐的,但边沿不再同步。
配置铁律 : 绝对不要在PWM通道运行时切换对齐模式(修改
CAEx位) 。这必然会导致输出波形出现无法预测的混乱。对齐模式必须在通道初始化阶段、使能之前就确定并配置好。
4.3 模式选择实战建议
如何选择?根据你的应用场景来定:
| 应用场景 | 推荐模式 | 理由 |
|---|---|---|
| 简单的LED调光、蜂鸣器 | 左对齐 | 配置简单,无需考虑EMI。 |
| 开关电源(Buck, Boost) | 中心对齐 | 显著降低输入/输出电流纹波和EMI,提高效率。 |
| 有刷直流电机调速 | 两者皆可,中心对齐更优 | 左对齐简单;中心对齐能降低电机噪音和电刷火花。 |
| 无刷直流(BLDC)或永磁同步(PMSM)电机FOC控制 | 中心对齐(几乎是强制要求) | 现代电机控制算法(如SVPWM)依赖于中心对齐波形来生成对称的电压矢量,这对于实现低谐波、高效率、平稳转矩至关重要。 |
| 多通道严格同步(如H桥) | 左对齐 | 保证所有开关管的驱动信号边沿对齐,简化死区插入和保护逻辑。 |
| 对EMI有严格要求的汽车/工业产品 | 中心对齐 | 帮助通过CISPR 25等EMC标准测试。 |
一个计算实例 :假设我们需要为一款小型无人机电调生成一个16kHz的中心对齐PWM。系统总线时钟E=24MHz,我们选择Clock SA,并配置预分频和 PWMSCLA 得到 Fclock = 1MHz 。 目标频率 Fpwm = 16kHz 。 根据公式 Fpwm = Fclock / (2 * PWMPERx) ,可得 PWMPERx = Fclock / (2 * Fpwm) = 1,000,000 / (2 * 16,000) = 31.25 。 取整后 PWMPERx = 31 。此时实际输出频率 Fpwm_actual = 1,000,000 / (2 * 31) ≈ 16,129 Hz ,误差在可接受范围内。 若需要50%占空比,则设置 PWMDTYx = PWMPERx / 2 = 15.5 ,取整为15或16会产生细微的占空比偏差,这是数字PWM固有的量化误差,对于8位分辨率,此误差约为0.4%。
5. 16位高分辨率模式:通道级联实战
在许多精密控制场合,如高精度伺服舵机、低噪音风扇调速或高保真LED调光,8位PWM(256级分辨率)可能不够用。例如,在24V系统中,8位PWM的最小电压步进是24V/256≈94mV,这可能引起可察觉的电机阶跃或灯光闪烁。S12PWM8B8CV2模块提供了将两个8位通道级联成1个16位通道的能力,将分辨率提升至65536级。
5.1 级联配置方法
级联通过 PWMCTL 寄存器中的控制位实现:
CON67: 将通道6和7级联。通道6成为高8位,通道7成为低8位。CON45: 将通道4和5级联。CON23: 将通道2和3级联。CON01: 将通道0和1级联。
级联后,资源占用与控制权转移 :
- 时钟源 :由 低阶通道 的时钟选择位(
PCLKx,PCLKABx)决定。例如,通道6&7级联后,使用通道7的时钟配置。 - 输出引脚 :PWM波形仅从 低阶通道 的输出引脚产生。例如,通道6&7级联后,PWM波形从PWM7引脚输出,PWM6引脚无效。
- 使能控制 :仅由 低阶通道 的使能位(
PWME7)控制。高阶通道的使能位(PWME6)被忽略。 - 极性控制 :由 低阶通道 的极性位(
PPOL7)控制。 - 对齐模式 :由 低阶通道 的中心对齐使能位(
CAE7)控制。 - 周期与占空比寄存器 :高阶通道的
PWMPER6和PWMDTY6成为16位值的高字节;低阶通道的PWMPER7和PWMDTY7成为低字节。构成一个16位的PWMPER16和PWMDTY16。
5.2 16位模式下的寄存器访问
这是最容易出错的地方:
- 写入计数器 :任何对16位计数器(视为一个整体)的写入操作,或者单独写入其高字节(
PWMCNT6)或低字节(PWMCNT7),都会导致整个16位计数器被复位。因此,在16位模式下,应使用16位访问指令来操作计数器,以确保原子性。 - 读取计数器 : 必须使用16位访问指令一次读取 。如果先读高字节再读低字节,在这两条指令之间计数器可能已经变化,导致读到的是一个“撕裂”的不正确值(例如,0x01FF之后变成0x0200,你可能读到0x01和0x00,组合成错误的0x0100)。
- 写入周期/占空比寄存器 :同样,为了设置一个准确的16位值,最好使用16位写入操作。或者,在通道禁用时,分别写入高、低字节(因为双缓冲机制,在使能前写入即可)。
核心警告 : 只能在两个通道都被禁用(
PWMEx=0)的情况下,修改CONxx位来启用或禁用级联功能 。在通道运行时修改级联配置,必然导致不可预测的输出和行为。
5.3 16位模式应用实例:高精度温控风扇
假设我们需要控制一个4线PWM风扇,其转速要求非常平滑,无级变速。风扇PWM控制信号频率为25kHz,接受5V标准电平。
- 需求 :在0-100%转速范围内,希望转速变化尽可能平滑,最小占空比步进小于0.1%。
- 分析 :8位分辨率步进为1/256≈0.39%,可能在某些转速点会有跳变感。16位分辨率步进为1/65536≈0.0015%,远高于需求。
- 配置 :
- 将通道0和1级联(
CON01=1)。 - 配置通道1(低阶)的时钟源,产生
Fclock = 1.6MHz(例如,E=16MHz,Clock A = E/2,PWMSCLA适当分频)。 - 目标PWM频率25kHz。若采用中心对齐模式(减少EMI),
PWMPER16 = Fclock / (2 * Fpwm) = 1,600,000 / (2 * 25,000) = 32。这是一个很小的值,意味着16位分辨率在周期寄存器上浪费了。但 占空比的分辨率仍然是16位的 。我们可以通过提高Fclock来增大PWMPER16,从而充分利用16位周期寄存器的范围,获得更精细的频率调节能力,但这里占空比精度是关键。 - 设置
PPOL1=1(起始高电平,风扇常见约定)。 - 占空比
PWMDTY16可在0到PWMPER16之间设置。例如,50%转速对应PWMDTY16 = PWMPER16 / 2 = 16。 - 通过一个温度传感器读取的ADC值,通过PID算法计算出一个0-65535之间的目标
PWMDTY16值,即可实现极高精度的线性转速控制。
- 将通道0和1级联(
6. 边界条件、异常处理与调试技巧
即使配置正确,理解边界情况和异常行为也是写出稳健PWM驱动代码的关键。
6.1 关键边界条件
手册中明确列出了几种特殊情况,其输出行为是确定的:
PWMDTYx |
PWMPERx |
PPOLx |
PWMx 输出 |
|---|---|---|---|
$00 |
>$00 |
1 | 恒为低电平 |
$00 |
>$00 |
0 | 恒为高电平 |
| 任何值 | $00 |
1 | 恒为高电平 (计数器为0且不计数) |
| 任何值 | $00 |
0 | 恒为低电平 (计数器为0且不计数) |
>= PWMPERx |
任何值 | 1 | 恒为高电平 |
>= PWMPERx |
任何值 | 0 | 恒为低电平 |
解读与应对 :
- 占空比为0或100% :当
PWMDTYx为0或大于等于PWMPERx时,PWM输出将退化为固定的低电平或高电平。这在希望完全关闭或完全打开某个功率开关时是有用的。 - 周期为0 :这是一个无效配置,会导致计数器停止。 应避免将
PWMPERx设置为0 。在动态调整频率时,务必确保新值大于0。
6.2 首次使能与动态重配置的“不规则周期”
手册多次警告,以下操作可能导致紧接着的一个PWM周期变得“不规则”(Irregular):
- 首次使能通道(
PWMEx从0变1)后的第一个周期。 - 在通道运行时写入计数器(
PWMCNTx)。 - 在通道运行时改变时钟分频(
PWMSCLA/B)或时钟源选择位(PCLKx)。 - 在通道运行时改变对齐模式(
CAEx)。 - 通过写入计数器来强制更新周期/占空比。
“不规则”通常意味着这个周期的长度或脉冲宽度可能不是预期的值。在敏感的应用中(如电机启动、精密电源),这可能引发问题。
最佳实践 :
- 初始化序列标准化 :始终遵循“配置 -> 复位计数器 -> 使能”的顺序。
// 示例代码片段 (伪代码风格) void PWM_Channel_Init(uint8_t ch) { PWM_DISABLE(ch); // 确保通道禁用 PWM_SET_CLOCK_SOURCE(ch, CLOCK_SA); // 配置时钟 PWM_SET_PRESCALER(ch, 某值); PWM_SET_SCALE(ch, 某值); PWM_SET_ALIGNMENT(ch, CENTER_ALIGNED); // 设置对齐模式 PWM_SET_POLARITY(ch, ACTIVE_HIGH); PWM_SET_PERIOD(ch, 计算出的周期值); PWM_SET_DUTY(ch, 初始占空比); PWM_WRITE_COUNTER(ch, 0); // 关键!复位计数器到已知状态 // 所有配置完成后,最后使能 PWM_ENABLE(ch); } - 动态调整策略 :需要改变占空比或频率时,利用双缓冲机制。在后台计算并写入新的
PWMPERx和PWMDTYx值,让它们在下一个自然周期边界生效。除非响应极端紧急事件,否则不要使用“写入计数器”的方法来强制立即更新。 - 模式/时钟切换 :如果需要改变对齐模式或时钟源,必须先禁用通道,修改配置,复位计数器,再重新使能。
6.3 调试与问题排查
当PWM输出不符合预期时,可以按以下步骤排查:
- 确认时钟 :首先检查总线时钟E是否正确配置并运行在预期频率。使用示波器测量一个已知的GPIO翻转频率来验证。
- 检查使能位 :最基础的错误,确认
PWMEx位是否已置1。 - 验证引脚复用 :S12的PWM输出引脚通常与其他功能复用。确认PORTx_PCRn寄存器已正确配置为PWM功能。
- 测量频率 :用示波器测量输出频率,与计算值对比。
- 频率偏差大:检查时钟预分频、
PWMSCLA/B寄存器、PWMPERx寄存器的计算和配置。 - 无输出或频率极低:检查
PWMPERx是否被意外设置为0或过大值;检查时钟选择位是否正确;检查计数器是否因写入操作而停止。
- 频率偏差大:检查时钟预分频、
- 测量占空比 :与计算值对比。
- 占空比始终0%或100%:检查
PWMDTYx与PWMPERx的关系,以及PPOLx设置,参考上述边界条件表。 - 占空比偏差:检查
PWMDTYx寄存器写入值,注意在中心对齐模式下占空比计算与左对齐相同,但周期长度是两倍。
- 占空比始终0%或100%:检查
- 观察波形对齐 :对于多通道,用多踪示波器观察波形是左对齐还是中心对齐,边沿是否同步。这能直接验证
CAEx位的配置。 - 16位模式问题 :如果级联后无输出,检查:
- 两个通道是否都已禁用后才设置
CONxx位。 - 输出是否连接在低阶通道的引脚上。
- 是否通过低阶通道的使能位来使能。
- 读写16位寄存器时是否使用了正确的16位访问指令。
- 两个通道是否都已禁用后才设置
最后,分享一个我调试时常用的小技巧:在初始化阶段,可以先将占空比设置为50%,用示波器观察。一个对称稳定的方波能最快地验证时钟和周期配置是否正确。然后再去调整占空比看其变化是否线性。对于电机控制项目,在连接电机之前,务必先用示波器验证所有PWM通道的波形、频率、死区(如果有时)都完全正确,这样可以避免昂贵的硬件损坏。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 12
12 0
0- 0



 已为社区贡献79条内容
已为社区贡献79条内容

所有评论(0)