四轴飞控1——前置知识
目录
一、飞控系统
1、系统集成:通过STM32HAL库实现
2、通信系统:通过SI24R1实现
3、电机控制:通过8520空心杯电机实现
4、软件架构:通过FreeRTOS创建多个任务
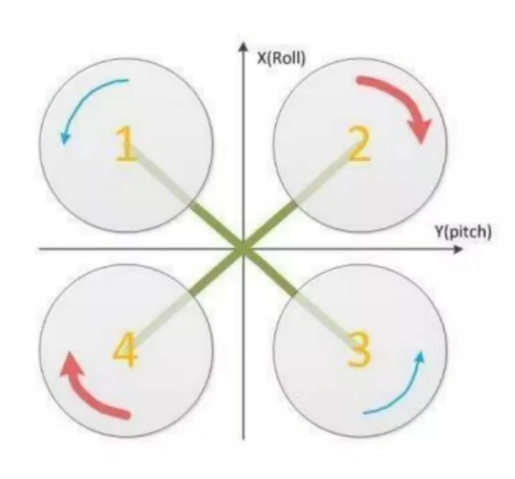
二、四轴飞行器结构
1、十字型
2、X型(本案例采用X型)
三、主控
1、STM32F103C8T6
SRAM-20KB
Flash-64KB
ADC-2个
定时器-4个
IIC-2个
SPI-2个
USART-3个
四、电源
1、锂电池
输出电压:3.7V
容量:2000/500mAh
2、IP5305T
充电/放电:5V
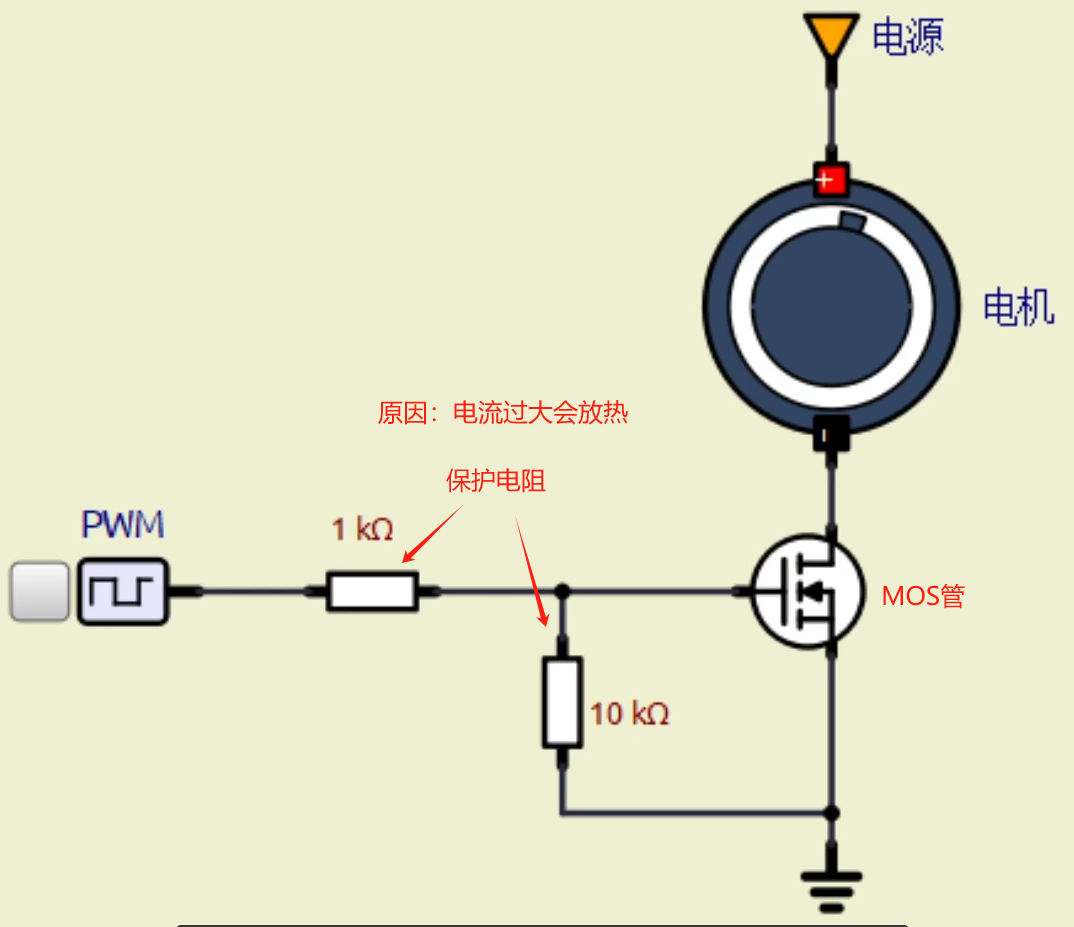
五、8520空心杯直流电机
由于电机通电后会自动旋转,所以加上数控开关来控制电机的旋转,如下图:
六、传感器
1、陀螺仪-MPU6050
功能:测量飞行姿态(欧拉角:俯仰角pitch,偏航角yaw,横滚角roll)
通信接口:IIC
2、激光测距仪-VL53L1X
功能:测量飞行高度
通信接口:IIC
七、通信
1、2.4G无线信号收发器-SI24R1
功能:收发遥控与飞控之间的信号
通信接口:SPI
八、遥控器功能:
1、四个按键(上下左右)微调
2、左上角短按为关机
3、右上角短按为定高,长按为校准摇杆
4、左摇杆分别为油门和顺时针/逆时针旋转
5、右摇杆为前后左右
九、遥控器显示
1、显示屏-OLED
通信接口:SPI

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)