PlatformIO + ESP32-S3 + SimpleFOC 2.4.0 环境搭建完整攻略
前言
PlatformIO 是开源的物联网开发生态系统,提供跨平台的代码构建器、集成开发环境(IDE),兼容 Arduino、ESP8266 和 mbed 等框架。本攻略将详细介绍如何在 Windows 环境下,通过命令行工具完整搭建 PlatformIO 开发环境,并配置 ESP32-S3 开发板以支持 SimpleFOC v2.4.0 库。
先放成功的图片
第一部分:前期准备
1.1 硬件准备
- ESP32-S3-DevKitC-1 开发板(8MB Flash 版本)
- USB Type-C 数据线(支持数据传输)
- 电脑(Windows 10/11 系统)
1.2 软件准备
- Python 3.9+:已安装并配置环境变量(本例使用 D:\Program\Python39)
- Visual Studio Code:已安装
- 科学上网工具(梯子):必须支持全局代理模式,用于下载 PlatformIO 平台包和工具链
1.3 网络环境说明
由于 PlatformIO 的依赖包托管在海外服务器(GitHub、PyPI 等),国内网络环境下下载速度极慢或频繁失败。因此:
- 安装 Python 包时:使用国内镜像源(如阿里云、清华)
- 安装平台包和工具链时:必须开启梯子的全局模式(实测约 5 分钟完成全部下载)
第二部分:VS Code 扩展配置
2.1 安装 PlatformIO IDE 扩展
- 打开 VS Code
- 点击左侧扩展图标(或按 Ctrl+Shift+X)
- 搜索 PlatformIO IDE
- 点击安装
2.2 配置扩展使用本地 Python
安装完成后,不要立即重启 VS Code。按 Ctrl+Shift+P 打开命令面板,输入 Preferences: Open Settings (JSON),在打开的 settings.json 中添加以下配置:
json
{
"platformio-ide.useBuiltinPIOCore": false,
"platformio-ide.useBuiltinPython": false,
"platformio-ide.customPATH": "D:\\Program\\Python39\\Scripts",
"platformio-ide.customPyPiIndexUrl": "https://mirrors.aliyun.com/pypi/simple/"
}
配置说明:
- useBuiltinPIOCore: false:不使用扩展自带的 PIO Core,改用系统安装的
- useBuiltinPython: false:不使用扩展自带的 Python,改用系统安装的 Python
- customPATH:指定 Python 的 Scripts 目录路径(根据自己实际安装路径修改)
- customPyPiIndexUrl:指定 PyPI 镜像源为阿里云,加速 Python 包下载
⚠️ 注意:路径中的反斜杠需要使用双反斜杠 \\ 转义。
第三部分:安装 PlatformIO Core(命令行)
3.1 打开命令提示符
以管理员身份打开命令提示符(CMD)或 PowerShell。
3.2 安装 PlatformIO Core
执行以下命令,使用清华镜像源安装:
bash
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple platformio
为什么不使用阿里云镜像? 阿里云镜像的 PlatformIO 包更新可能滞后,清华镜像源通常更新更及时。
3.3 验证安装
安装完成后,验证是否成功:
bash
pio --version
如果显示版本号(如 PlatformIO Core, version 6.x.x),则安装成功。
3.4 可选:卸载旧版本(如果需要)
如果之前安装过旧版本,可以使用以下命令彻底卸载:
bash
pip install pip-autoremove
pip-autoremove platformio -y
这两条命令按需执行,新安装无需执行。
前面是核心,也是最容易卡的地方。
第四部分:初始化 ESP32-S3 项目
4.1 创建项目目录
在纯英文路径下创建项目文件夹,例如:
D:\FOC_Project\ESP32-S3-SimpleFOC
⚠️ 关键提醒:项目路径绝对不能包含中文字符、空格或特殊符号,否则后续编译时链接器(ld.exe)会报错 cannot open map file。
4.2 初始化项目
打开命令提示符,进入项目目录:
bash
cd /d D:\FOC_Project\ESP32-S3-SimpleFOC
执行初始化命令:
bash
pio project init --board esp32-s3-devkitc-1
此步骤的作用:
- 自动创建 platformio.ini 配置文件
- 下载 ESP32-S3 所需的平台包和工具链(需要开启梯子全局模式)
下载内容预估:
- espressif32 平台包:约 200MB
- 工具链(toolchain-xtensa-esp32 等):约 300MB
- 框架(Arduino-esp32):约 100MB
网络说明:开启全局代理后,整个过程约 5 分钟即可完成。如果不使用代理,可能因超时而失败。
4.3 查看已安装内容
安装完成后,可以查看已安装的平台和工具链:
bash
pio pkg list
或使用旧版命令:
bash
pio platform list
第五部分:配置 SimpleFOC v2.4.0 支持
5.1 问题背景
SimpleFOC v2.4.0 要求 ESP-IDF 5.x 和 Arduino-esp32 3.0+,而 PlatformIO 官方平台默认使用较旧的 ESP-IDF 4.x,无法满足要求。因此需要使用社区维护的 pioarduino 平台。
5.2 安装社区版平台
执行以下命令,安装 pioarduino 社区版平台(版本 53.03.10):
bash
pio pkg install --global --platform "https://github.com/pioarduino/platform-espressif32/releases/download/53.03.10/platform-espressif32.zip"
此平台包含:
- Arduino-esp32 3.1.0 ✅(满足 SimpleFOC 要求的 3.0+)
- ESP-IDF 5.x ✅(满足 SimpleFOC 要求的 5.x+)
5.3 验证平台安装
执行以下命令确认安装成功:
bash
pio platform list
输出中应包含:
espressif32 @ 53.3.10 (required: platformio/espressif32)
第六部分:配置 platformio.ini
6.1 编写配置文件
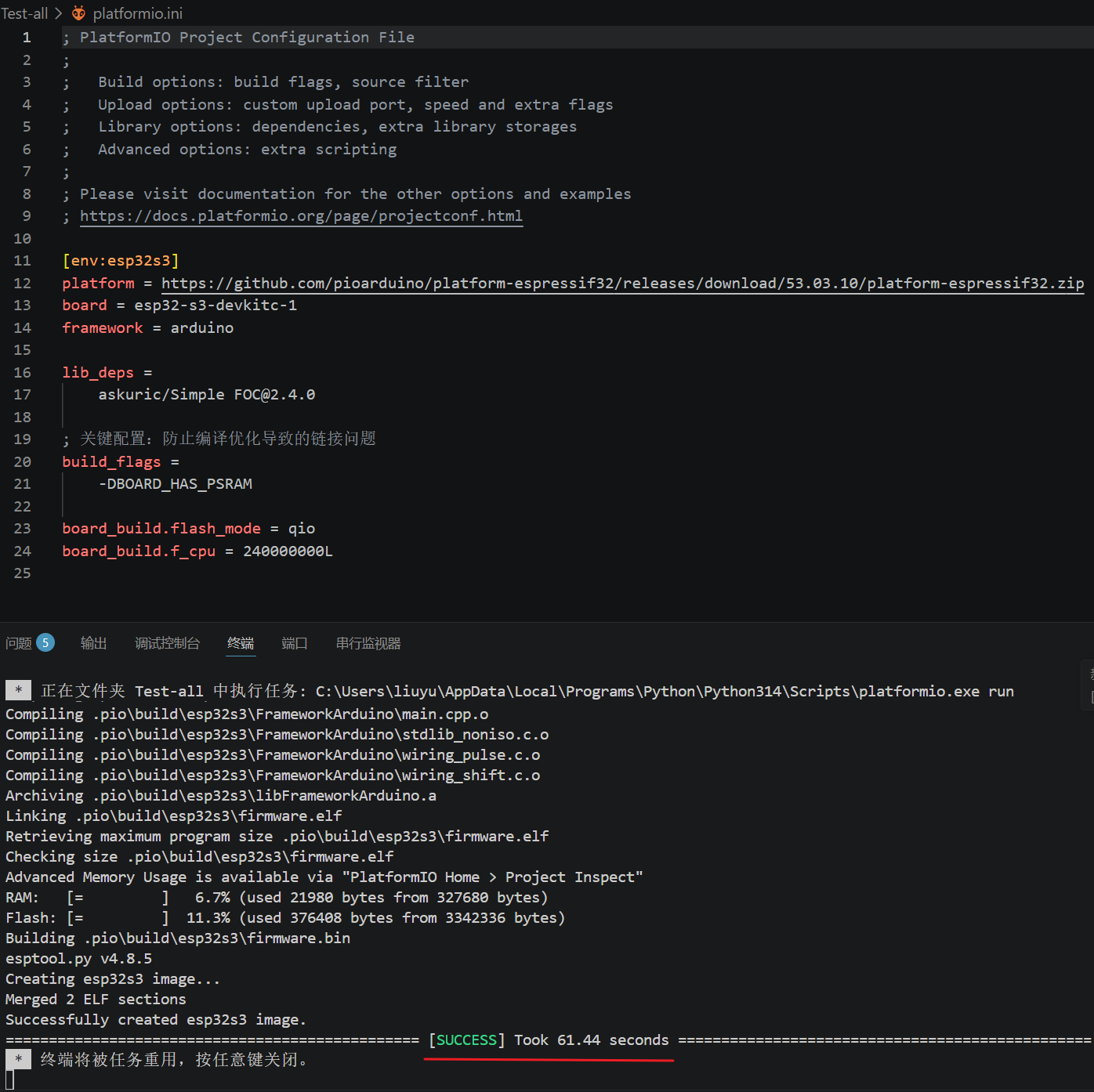
打开项目根目录下的 platformio.ini 文件,替换为以下内容:
ini
[env:esp32s3]
platform = https://github.com/pioarduino/platform-espressif32/releases/download/53.03.10/platform-espressif32.zip
board = esp32-s3-devkitc-1
framework = arduino
lib_deps =
askuric/Simple FOC@2.4.0
build_flags =
-Wno-unused-parameter
-DBOARD_HAS_PSRAM
6.2 配置项说明
表格
|
配置项 |
说明 |
|
platform |
指定使用 pioarduino 社区版平台,必须使用完整 URL |
|
board |
指定开发板型号为 ESP32-S3-DevKitC-1 |
|
framework |
使用 Arduino 框架 |
|
lib_deps |
添加 SimpleFOC v2.4.0 库依赖 |
|
build_flags |
添加编译标志:-Wno-unused-parameter 忽略未使用参数警告;-DBOARD_HAS_PSRAM 启用 PSRAM 支持 |
6.3 关于 -mforce-l32 的说明
在之前的尝试中,某些旧版配置包含 -mforce-l32 编译选项。此选项是旧版 Xtensa LX6 架构编译器特有的,而 ESP32-S3 使用 Xtensa LX7 架构,新版工具链已不支持此选项。在最终配置中不要添加此参数。
这里是最磨人的,如果这里platform = https://github.com/pioarduino/platform-espressif32/releases/download/53.03.10/platform-espressif32.zip,安装很慢,可以在在命令提示符下:pio pkg install --global --platform https://github.com/pioarduino/platform-espressif32/releases/download/53.03.10/platform-espressif32.zip
如果有其他提示找不到某某文件,可以反复前面的过程,pio project init --board esp32-s3-devkitc-1,重新来过。
第七部分:编译验证
7.1 编写测试代码
在 src 目录下创建 main.cpp 文件,写入以下测试代码:
cpp
#include <Arduino.h>
#include <SimpleFOC.h>
BLDCMotor motor = BLDCMotor(7);
BLDCDriver3PWM driver = BLDCDriver3PWM(32, 33, 25, 22);
void setup() {
Serial.begin(115200);
motor.linkDriver(&driver);
motor.init();
Serial.println("SimpleFOC initialized!");
}
void loop() {
motor.loopFOC();
motor.move(2.0f);
}
7.2 编译项目
在命令提示符中执行:
bash
pio run
7.3 首次编译说明
首次编译需要下载 SimpleFOC 库(约 5MB),请确保梯子处于开启状态。下载完成后开始编译,整个过程约 2-3 分钟。
7.4 编译成功标志
看到以下输出表示编译成功:
==================================================== [SUCCESS] Took 62.84 seconds
并生成以下文件:
- .pio\build\esp32s3\firmware.bin(固件文件)
- .pio\build\esp32s3\firmware.elf(调试文件)
- .pio\build\esp32s3\partitions.bin(分区表)
第八部分:烧录与测试
8.1 连接开发板
用 USB 数据线将 ESP32-S3 开发板连接到电脑。
8.2 安装驱动
ESP32-S3 使用 CP210x 或 CH340 串口芯片,需要安装对应驱动:
- CP210x:https://www.silabs.com/developers/usb-to-uart-bridge-vcp-drivers
- CH340:http://www.wch.cn/download/CH341SER_EXE.html
8.3 烧录固件
执行烧录命令:
bash
pio run -t upload
8.4 查看串口输出
烧录完成后,打开串口监视器:
bash
pio device monitor
设置波特率为 115200,应看到 SimpleFOC initialized! 输出,表明环境搭建成功。
第九部分:命令速查表
表格
|
命令 |
用途 |
|
pip install platformio |
安装 PlatformIO Core |
|
pio --version |
查看 PlatformIO 版本 |
|
pio project init --board esp32-s3-devkitc-1 |
初始化 ESP32-S3 项目 |
|
pio pkg list |
列出已安装的平台和包 |
|
pio platform list |
列出已安装的平台(旧版命令) |
|
pio pkg install --global --platform "URL" |
从 URL 安装平台包 |
|
pio run |
编译项目 |
|
pio run -t upload |
编译并烧录 |
|
pio device monitor |
打开串口监视器 |
|
pio system prune --force |
清理缓存 |
第十部分:常见问题与解决方案
10.1 编译时提示 ESP-IDF version 4 or lower detected
原因:使用了旧版 PlatformIO 官方平台,不满足 SimpleFOC v2.4.0 的要求。
解决:改用 pioarduino 社区版平台(如本文 5.2 节所示)。
10.2 编译时提示 -mforce-l32: unrecognized command-line option
原因:-mforce-l32 是旧版 Xtensa LX6 架构的编译器选项,ESP32-S3 的 LX7 架构不支持。
解决:移除 -mforce-l32 编译选项。
10.3 链接时提示 cannot open map file
原因:项目路径包含中文、空格或特殊字符。
解决:将项目移动到纯英文路径。
10.4 下载平台包时超时失败
原因:国内网络无法稳定连接 GitHub 等海外服务器。
解决:开启梯子的全局模式,或使用国内镜像源(如本文 3.2 节所示)。
10.5 烧录失败(无法连接开发板)
原因:
- 未安装串口驱动
- 端口被占用
- 开发板未进入下载模式
解决: - 安装对应驱动
- 在 platformio.ini 中指定端口:upload_port = COM3
- 按住 BOOT 键再按 RESET 键进入下载模式
附录:主要参考链接
表格
|
资源 |
链接 |
|
PlatformIO 官网 |
https://platformio.org |
|
PIO 官方文档 |
https://docs.platformio.org |
|
pioarduino 社区版平台 |
https://github.com/pioarduino/platform-espressif32 |
|
SimpleFOC 官方 |
https://docs.simplefoc.com |
|
清华 PyPI 镜像 |
https://pypi.tuna.tsinghua.edu.cn/simple |
|
阿里云 PyPI 镜像 |
https://mirrors.aliyun.com/pypi/simple/ |
结语
PlatformIO 是开源的物联网开发生态系统,提供了强大的跨平台构建能力和丰富的程序库管理功能
。通过以上步骤,你已成功搭建了 ESP32-S3 的 SimpleFOC 开发环境。虽然安装过程中遇到了版本兼容性、网络下载、路径编码等问题,但通过使用社区维护的平台版本、正确配置镜像源和代理、以及遵循纯英文路径规范,最终得以顺利解决。
这套环境不仅适用于 SimpleFOC 电机控制项目,也可用于其他 Arduino 框架下的 ESP32-S3 开发。如需进一步了解 PlatformIO 的高级配置,建议查阅官方文档
。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)