GD32F303替代STM32的踩坑实录:时钟树与Flash差异分析
文章目录
每日一句正能量
懂得放手,学会顺势,很多时候反而能起到事半功倍的效果。
放手不是认输,是发现船方向错了,松开锚才能调头。顺的不是“懒”,是“道”——规律与时机。
导读
谁说嵌入式只是调包和焊板子?国产替代不是简单的"Pin-to-Pin"换芯片,从RCC到FMC,从1KB页到2KB页,从Cortex-M3到Cortex-M4,每一行寄存器的差异都是工程师必须啃下的硬骨头。本文基于真实量产项目迁移经验,记录GD32F303替代STM32F103过程中的7个致命陷阱与解决方案。
一、背景:国产替代不是"换芯片"那么简单
2023年某工业控制项目因供应链调整,需要将核心控制器从STM32F103RCT6(Cortex-M3,72MHz,256KB Flash,48KB SRAM)迁移至GD32F303VCT6(Cortex-M4,120MHz,256KB Flash,48KB SRAM)。表面上看,两者封装相同(LQFP100)、引脚兼容、Flash/SRAM容量一致,似乎可以"无缝替换"。
然而实际迁移过程中,我们遇到了以下致命问题:
- 时钟树差异:GD32F303的PLL倍频系数与STM32不同,直接套用代码导致系统时钟异常
- Flash等待周期:120MHz下需要3~4个等待周期,而STM32在72MHz下只需2个
- 页大小差异:STM32 Flash页大小为1KB,GD32为2KB,导致Bootloader和参数存储区地址全部错位
- GPIO重映射寄存器:AFIO_MAPR寄存器位定义存在差异,USART2重映射后无法通信
- 调试接口:GD32仅支持SWD(无JTAG),原有4线调试器无法直接使用
本文将系统梳理这些差异,并提供经过验证的迁移代码,帮助正在或计划进行国产替代的团队少走弯路。
二、核心架构差异:Cortex-M3 vs Cortex-M4
2.1 硬件架构对比
| 特性 | STM32F103 | GD32F303 | 影响 |
|---|---|---|---|
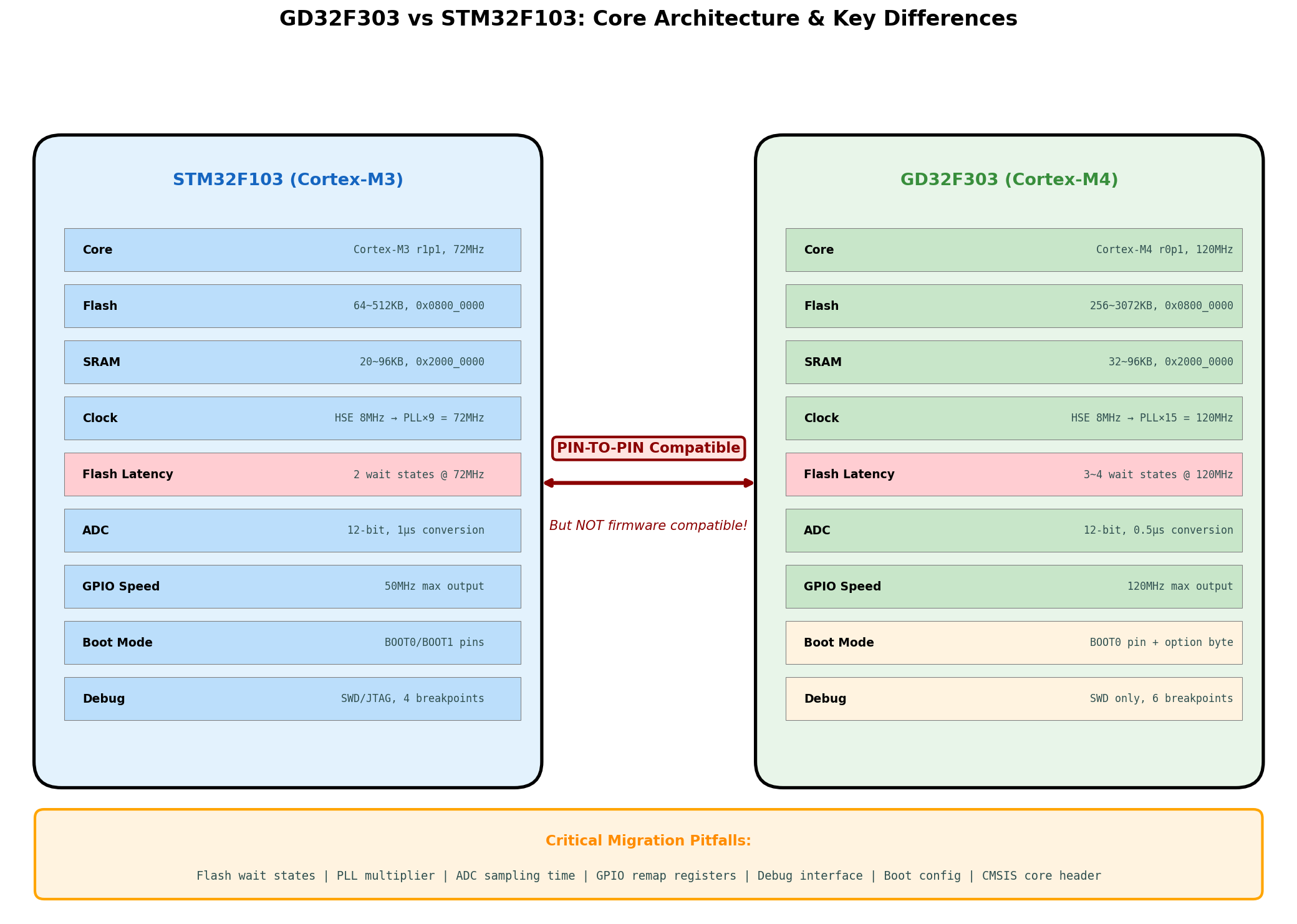
| 内核 | Cortex-M3 r1p1 | Cortex-M4 r0p1 | 新增DSP指令、FPU(单精度浮点) |
| 最高频率 | 72MHz | 120MHz | 性能提升67%,但Flash等待周期增加 |
| Flash容量 | 64~512KB | 256~3072KB | 大容量型号可存储更多固件 |
| SRAM | 20~96KB | 32~96KB | 起始地址相同(0x2000_0000) |
| Flash页大小 | 1KB | 2KB | Bootloader和参数存储地址需重新计算 |
| GPIO速度 | 50MHz max | 120MHz max | 高速SPI/FSMC时序需重新验证 |
| ADC转换时间 | 1μs | 0.5μs | 采样率可翻倍,但时钟配置需调整 |
| 调试接口 | SWD + JTAG | SWD only | 4线JTAG调试器需更换或配置 |
| 断点数量 | 4个(硬件) | 6个(硬件) | 调试体验略有提升 |
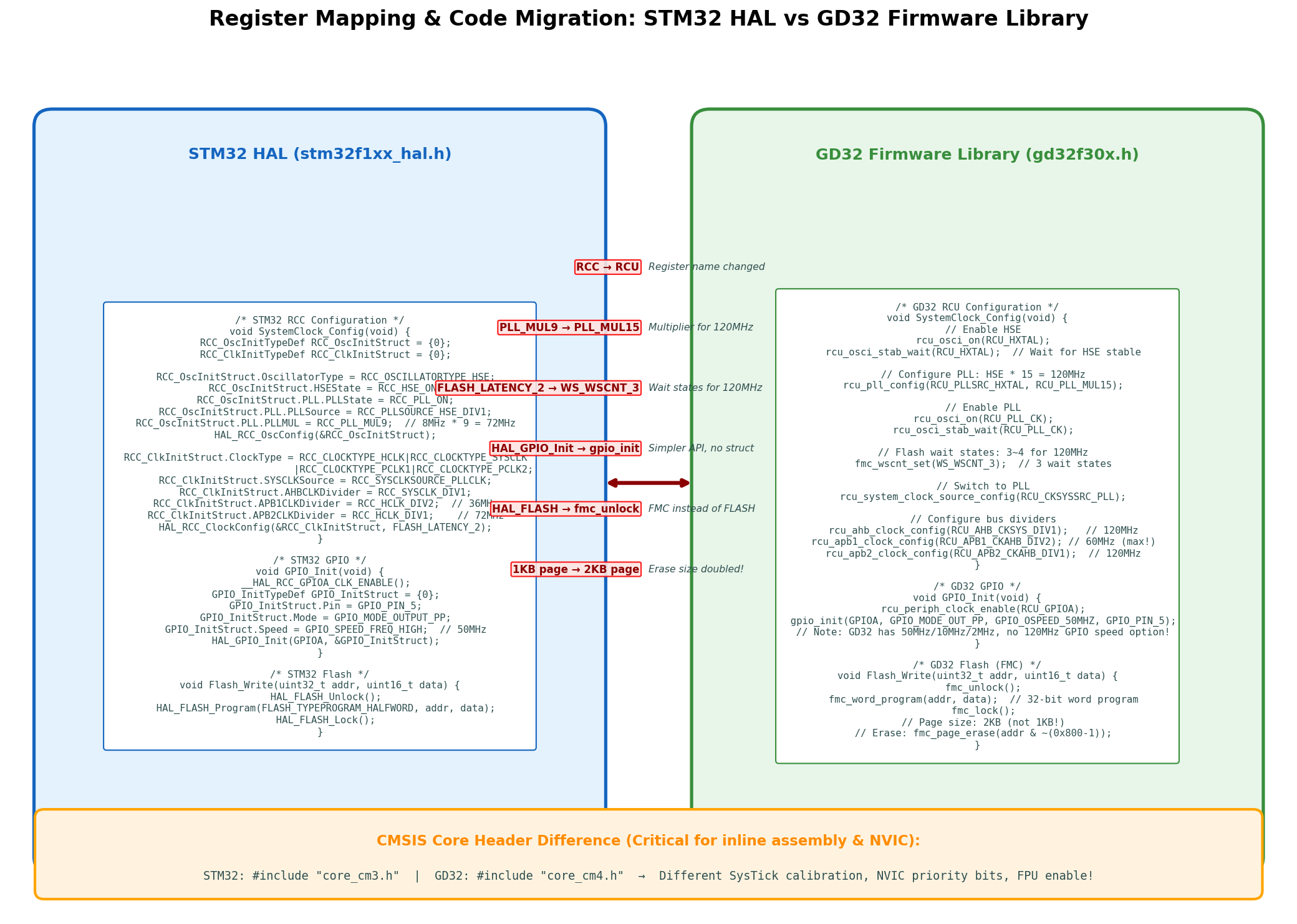
关键认知:虽然两者引脚兼容(Pin-to-Pin),但固件绝不兼容。GD32F303使用兆易创新自研的Firmware Library,寄存器命名、位定义、API风格与STM32 HAL完全不同。
2.2 CMSIS核心头文件差异
/* STM32F103: Cortex-M3 */
#include "core_cm3.h" /* ARM官方CMSIS核心头文件 */
#define __NVIC_PRIO_BITS 3 /* 3位优先级分组 */
/* GD32F303: Cortex-M4 */
#include "core_cm4.h" /* ARM官方CMSIS核心头文件 */
#define __NVIC_PRIO_BITS 4 /* 4位优先级分组! */
#define __FPU_PRESENT 1 /* 浮点单元存在 */
陷阱:若从STM32代码直接复制NVIC配置,优先级分组会错误。Cortex-M4有4位优先级(16个等级),而Cortex-M3只有3位(8个等级)。在GD32上设置优先级为0x04(M3的优先级4),实际会被解析为0x04(M4的优先级4),虽然数值相同,但可用的优先级分组方式不同。
三、时钟树差异:从72MHz到120MHz的PLL重算
3.1 时钟树架构对比
STM32F103时钟配置(72MHz)
/* STM32 HAL: SystemClock_Config() */
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/* 启用HSE(8MHz晶振) */
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE_DIV1; /* HSE不分频 */
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; /* 8MHz * 9 = 72MHz */
HAL_RCC_OscConfig(&RCC_OscInitStruct);
/* 总线分频 */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; /* HCLK = 72MHz */
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; /* APB1 = 36MHz (max!) */
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; /* APB2 = 72MHz */
/* Flash等待周期:72MHz需要2个WS */
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2);
}
GD32F303时钟配置(120MHz)
/* GD32 Firmware Library: SystemClock_Config() */
void SystemClock_Config(void)
{
/* 启用HSE(8MHz晶振) */
rcu_osci_on(RCU_HXTAL); /* 开启外部高速晶振 */
rcu_osci_stab_wait(RCU_HXTAL); /* 等待HSE稳定 */
/* 配置PLL:HSE * 15 = 120MHz
* 注意:GD32的PLL倍频系数范围是2~32,而STM32F103只有2~16
* 且GD32的PLL输入可以是HSE或HSE/2,而STM32F103固定为HSE/2
*/
rcu_pll_config(RCU_PLLSRC_HXTAL, RCU_PLL_MUL15);
/* 启用PLL并等待稳定 */
rcu_osci_on(RCU_PLL_CK);
rcu_osci_stab_wait(RCU_PLL_CK);
/* Flash等待周期:120MHz需要3~4个WS
* 这是最关键的陷阱!如果设置为2WS,Flash读取会出错,导致HardFault
*/
fmc_wscnt_set(WS_WSCNT_3); /* 3个等待周期 */
/* 切换到PLL时钟 */
rcu_system_clock_source_config(RCU_CKSYSSRC_PLL);
/* 等待时钟切换完成 */
while (RCU_SCSS_PLL != rcu_system_clock_source_get()) {
/* 等待PLL成为系统时钟源 */
}
/* 配置总线分频器 */
rcu_ahb_clock_config(RCU_AHB_CKSYS_DIV1); /* AHB = 120MHz */
rcu_apb1_clock_config(RCU_APB1_CKAHB_DIV2); /* APB1 = 60MHz (max 60MHz!) */
rcu_apb2_clock_config(RCU_APB2_CKAHB_DIV1); /* APB2 = 120MHz */
/* 更新SystemCoreClock全局变量 */
SystemCoreClock = 120000000;
}
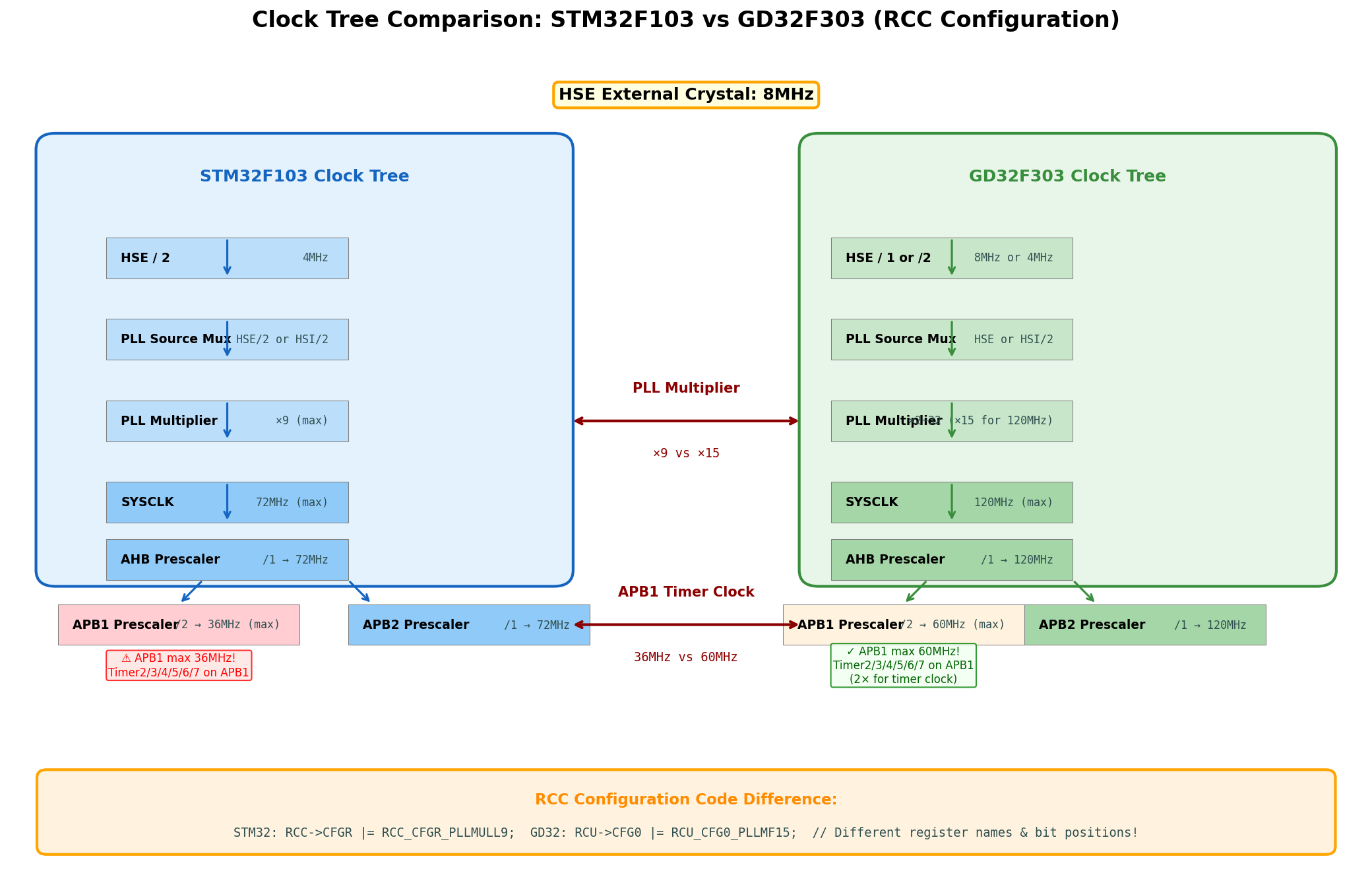
3.2 关键陷阱:APB1定时器时钟频率
STM32F103:APB1 max = 36MHz,定时器2/3/4/5/6/7的时钟为2 × PCLK1 = 72MHz(因为APB1预分频系数为2,非1)
GD32F303:APB1 max = 60MHz,定时器2/3/4/5/6/7的时钟为2 × PCLK1 = 120MHz(因为APB1预分频系数为2,非1)
实际影响:如果直接复用STM32的定时器初始化代码,定时器频率会翻倍!例如,原本配置为1ms周期的定时器中断,在GD32上会变成0.5ms。
/* STM32: TIM2 @ 72MHz, 1ms period */
TIM2->PSC = 7199; /* 72MHz / 7200 = 10kHz */
TIM2->ARR = 9999; /* 10kHz / 10000 = 1Hz (1ms) */
/* GD32: TIM2 @ 120MHz (APB1 timer clock), 1ms period */
/* 错误配置(直接复制STM32代码):实际周期为0.5ms! */
TIMER2->PSC = 7199; /* 120MHz / 7200 = 16.67kHz */
TIMER2->CAR = 9999; /* 16.67kHz / 10000 = 1.67ms (不是1ms!) */
/* 正确配置:需要重新计算预分频和周期 */
TIMER2->PSC = 11999; /* 120MHz / 12000 = 10kHz */
TIMER2->CAR = 9999; /* 10kHz / 10000 = 1Hz (1ms) */
四、Flash差异:从1KB页到2KB页的致命陷阱
4.1 Flash架构深度对比
| 特性 | STM32F103 | GD32F303 | 迁移影响 |
|---|---|---|---|
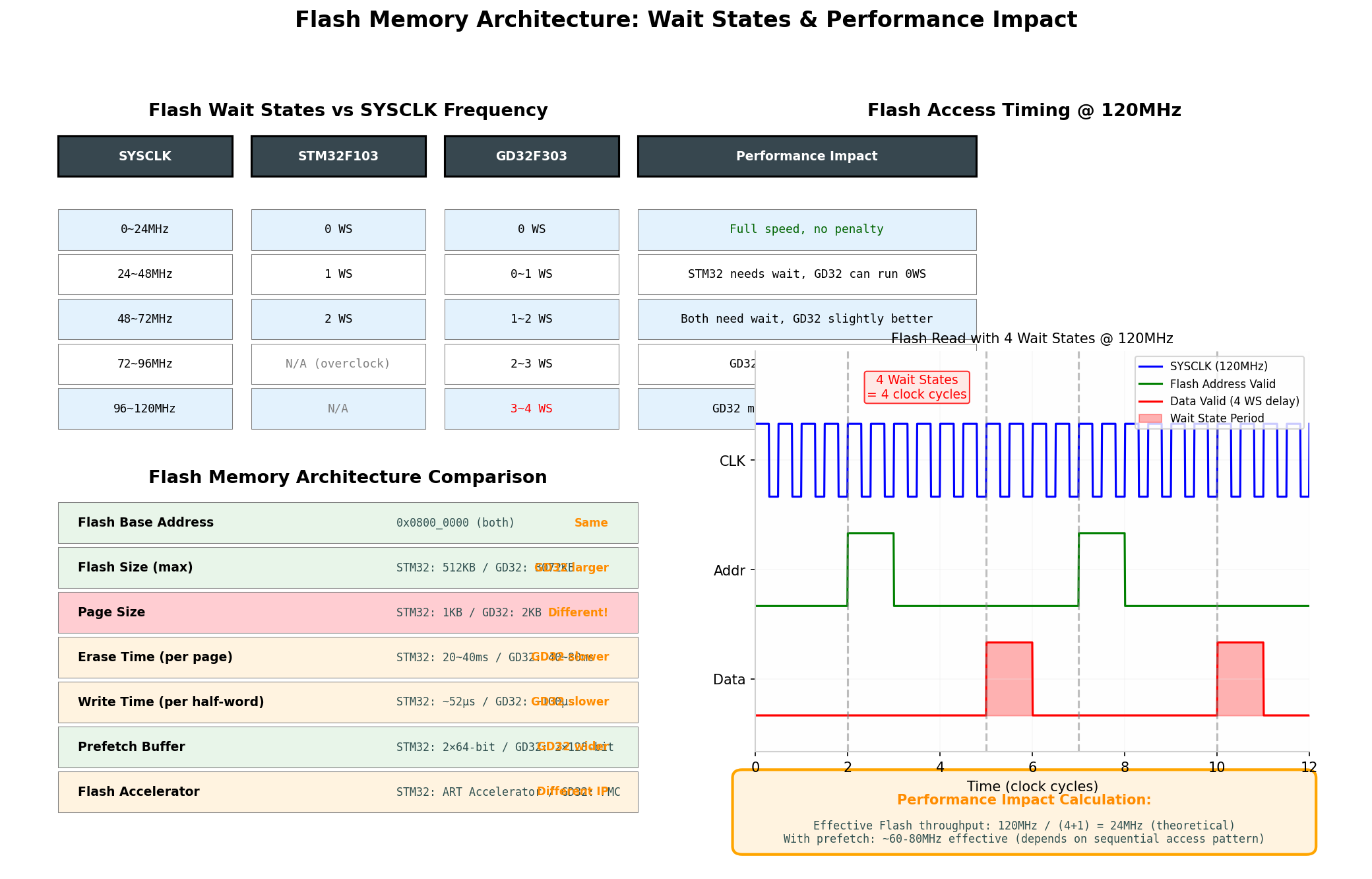
| Flash基地址 | 0x0800_0000 | 0x0800_0000 | 相同,无需修改 |
| 页大小 | 1KB | 2KB | 所有Flash操作地址需按2KB对齐 |
| 最大容量 | 512KB | 3072KB | 大容量应用可存储更多数据 |
| 擦除时间(每页) | 20~40ms | 40~80ms | 擦除时间翻倍,需调整超时 |
| 写入时间(半字) | ~52μs | ~100μs | 写入速度减半,大批量写入需优化 |
| 预取缓冲器 | 2×64-bit | 2×128-bit | GD32预取宽度更大,顺序读取更快 |
| Flash加速器 | ART Accelerator | FMC(Flash Memory Controller) | 名称不同,功能类似 |
4.2 Bootloader地址重算
这是迁移过程中最隐蔽也最致命的陷阱。假设原有STM32系统使用以下Flash分区:
STM32F103 Flash Layout (256KB, 1KB page):
0x0800_0000 ~ 0x0800_7FFF: Bootloader (32KB, 32 pages)
0x0800_8000 ~ 0x0800_FFFF: Application (32KB, 32 pages)
0x0801_0000 ~ 0x0801_7FFF: Parameter Storage (32KB, 32 pages)
0x0801_8000 ~ 0x0803_FFFF: Reserved (160KB)
直接迁移到GD32F303(256KB,2KB page):
GD32F303 Flash Layout (256KB, 2KB page):
0x0800_0000 ~ 0x0800_7FFF: Bootloader (32KB, 16 pages) ✓
0x0800_8000 ~ 0x0800_FFFF: Application (32KB, 16 pages) ✓
0x0801_0000 ~ 0x0801_7FFF: Parameter Storage (32KB, 16 pages) ✓
看起来地址相同,但擦除操作的最小单位从1KB变成了2KB!
致命场景:应用层需要更新参数区(0x0801_0000)的一个字节。在STM32上,只需擦除0x0801_00000x0801_03FF(1KB)。在GD32上,擦除0x0801_0000会同时擦除0x0801_00000x0801_07FF(2KB)!
如果参数区与应用区相邻,且参数区起始地址不是2KB对齐(例如0x0800_F800),擦除操作会越界破坏应用区!
4.3 Flash操作代码迁移
/* STM32 HAL: Flash写入 */
#include "stm32f1xx_hal_flash.h"
#define FLASH_PAGE_SIZE 1024 /* STM32: 1KB */
#define PARAM_STORAGE_ADDR 0x08010000
void STM32_Flash_ErasePage(uint32_t pageAddr)
{
HAL_FLASH_Unlock();
FLASH_EraseInitTypeDef EraseInitStruct;
uint32_t PageError = 0;
EraseInitStruct.TypeErase = FLASH_TYPEERASE_PAGES;
EraseInitStruct.PageAddress = pageAddr;
EraseInitStruct.NbPages = 1;
HAL_FLASHEx_Erase(&EraseInitStruct, &PageError);
HAL_FLASH_Lock();
}
void STM32_Flash_WriteHalfWord(uint32_t addr, uint16_t data)
{
HAL_FLASH_Unlock();
HAL_FLASH_Program(FLASH_TYPEPROGRAM_HALFWORD, addr, data);
HAL_FLASH_Lock();
}
/* GD32 Firmware Library: Flash写入 (FMC) */
#include "gd32f30x_fmc.h"
#define FLASH_PAGE_SIZE 2048 /* GD32: 2KB! */
#define PARAM_STORAGE_ADDR 0x08010000 /* 必须按2KB对齐 */
void GD32_Flash_ErasePage(uint32_t pageAddr)
{
/* 地址必须按2KB对齐 */
if (pageAddr % FLASH_PAGE_SIZE != 0) {
/* 错误处理:地址未对齐 */
return;
}
fmc_unlock(); /* 解锁FMC */
/* GD32的页擦除:传入页地址,自动擦除2KB */
fmc_page_erase(pageAddr);
/* 等待操作完成 */
fmc_state_enum status = fmc_ready_wait(FMC_TIMEOUT_COUNT);
if (status != FMC_READY) {
/* 错误处理:擦除失败或超时 */
fmc_lock();
return;
}
fmc_lock(); /* 锁定FMC */
}
void GD32_Flash_WriteWord(uint32_t addr, uint32_t data)
{
/* GD32支持32位字写入,而STM32只支持16位半字 */
/* 这可以提高写入效率,但需注意地址对齐 */
fmc_unlock();
fmc_word_program(addr, data);
fmc_state_enum status = fmc_ready_wait(FMC_TIMEOUT_COUNT);
if (status != FMC_READY) {
/* 错误处理 */
}
fmc_lock();
}
/* 批量写入优化:利用GD32的32位写入能力 */
void GD32_Flash_WriteBuffer(uint32_t addr, const uint32_t *data, uint32_t wordCount)
{
fmc_unlock();
for (uint32_t i = 0; i < wordCount; i++) {
fmc_word_program(addr + i * 4, data[i]);
/* 每写入一定数量后检查状态,避免超时 */
if (i % 8 == 0) {
fmc_state_enum status = fmc_ready_wait(FMC_TIMEOUT_COUNT);
if (status != FMC_READY) {
break;
}
}
}
fmc_lock();
}
4.4 Flash等待周期与性能
在120MHz下,GD32F303需要3~4个Flash等待周期(Wait States)。这意味着:
- 理论Flash读取速度:120MHz / (3+1) = 30MHz(4WS时)
- 实际有效速度:由于预取缓冲器(128-bit宽)的存在,顺序读取时可以达到60~80MHz等效速度
- 随机访问性能:受限于Flash访问周期,约为30MHz等效
优化建议:
- 将频繁执行的代码(如中断处理、实时控制算法)放到SRAM中执行
- 使用
__attribute__((section(".ramfunc")))将关键函数链接到SRAM - 开启FMC的预取缓冲器,提高顺序代码执行效率
/* 将函数放到SRAM执行(GD32链接器脚本) */
__attribute__((section(".ramfunc"), long_call))
void critical_realtime_function(void)
{
/* 此函数在SRAM中执行,不受Flash等待周期影响 */
/* 适用于电机控制、PID计算等实时性要求高的代码 */
}
五、GPIO与AFIO重映射差异
5.1 寄存器命名与位定义差异
| 功能 | STM32寄存器 | GD32寄存器 | 差异说明 |
|---|---|---|---|
| 时钟使能 | RCC->APB2ENR |
RCU->APB2EN |
寄存器名不同 |
| GPIO模式 | GPIOx->CRL/CRH |
GPIOx->CTL0/CTL1 |
寄存器名不同 |
| AFIO重映射 | AFIO->MAPR |
AFIO->PCF0 |
位定义不同! |
| USART1重映射 | AFIO_MAPR_USART1_REMAP |
AFIO_PCF0_USART0_REMAP |
位位置和名称都不同 |
5.2 USART2重映射陷阱
STM32F103:USART2重映射到PD5/PD6,使用AFIO_MAPR的bit3
/* STM32: USART2 remap to PD5(TX)/PD6(RX) */
RCC->APB2ENR |= RCC_APB2ENR_AFIOEN; /* 启用AFIO时钟 */
AFIO->MAPR |= AFIO_MAPR_USART2_REMAP; /* bit3 = 1 */
GD32F303:USART2(编号为USART1,因为从0开始)重映射到PD5/PD6,使用AFIO_PCF0的bit3,但位定义不同!
/* GD32: USART1 (对应STM32的USART2) remap to PD5(TX)/PD6(RX) */
rcu_periph_clock_enable(RCU_AF); /* 启用AFIO时钟 */
gpio_pin_remap_config(GPIO_USART1_REMAP, ENABLE); /* 使用GD32的API */
陷阱:如果直接按位操作AFIO->PCF0 |= (1 << 3),在GD32上可能映射到错误的引脚或功能。必须使用GD32 Firmware Library提供的gpio_pin_remap_config()函数,或查阅数据手册确认位定义。
5.3 GPIO速度配置差异
/* STM32: GPIO速度配置 */
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; /* 50MHz max */
/* GD32: GPIO速度配置 */
gpio_init(GPIOA, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_5);
/* 注意:GD32的OSPEED选项为2MHz/10MHz/50MHz,没有120MHz选项! */
/* 虽然芯片支持120MHz GPIO,但固件库只提供50MHz配置 */
六、调试接口与开发工具链
6.1 调试接口差异
| 特性 | STM32F103 | GD32F303 |
|---|---|---|
| JTAG | 支持(5线:TMS/TCK/TDI/TDO/TRST) | 不支持 |
| SWD | 支持(2线:SWDIO/SWCLK) | 支持(2线) |
| SWO | 支持(1线串行输出) | 支持 |
| 断点 | 4个硬件断点 | 6个硬件断点 |
| 观察点 | 2个 | 2个 |
迁移影响:如果原有调试器使用JTAG接口(如ULINK2的JTAG模式),需要更换为SWD模式或购买支持SWD的调试器(如J-Link、GD-Link)。
GD-Link:兆易创新提供的免费调试器,支持SWD和SWO,与Keil/IAR/GCC均兼容。对于预算有限的项目,GD-Link是性价比最高的选择。
6.2 开发工具链对比
| 工具链 | STM32支持 | GD32支持 | 备注 |
|---|---|---|---|
| Keil MDK | 需安装STM32 Device Family Pack | 需安装GD32 Device Family Pack | 两者Pack不可混用 |
| IAR EWARM | 内置支持 | 需安装GD32插件 | 项目设置需重新配置 |
| GCC + VSCode | 使用OpenOCD + STM32配置文件 | 使用OpenOCD + GD32配置文件 | 配置文件需修改target |
| STM32CubeIDE | 原生支持 | 不支持 | 不可用于GD32开发 |
| GD32 MCU Dev Tools | 不支持 | 原生支持 | 兆易创新官方IDE |
建议:对于从STM32迁移的项目,推荐使用Keil MDK + GD32 Pack或VSCode + GCC + OpenOCD。避免使用STM32CubeIDE,因为它与GD32完全不兼容。
七、完整迁移代码对比
7.1 抽象层设计:实现跨平台兼容
为了降低未来再次迁移的成本,建议设计一个硬件抽象层(HAL),将STM32和GD32的差异封装到底层:
/* hal_platform.h — 跨平台硬件抽象层 */
#pragma once
#include <stdint.h>
#include <stdbool.h>
/* 平台检测 */
#if defined(STM32F103xB) || defined(STM32F103xE)
#define PLATFORM_STM32 1
#include "stm32f1xx_hal.h"
#elif defined(GD32F30x)
#define PLATFORM_GD32 1
#include "gd32f30x.h"
#else
#error "Unsupported platform!"
#endif
/* 统一的时钟配置接口 */
typedef struct {
uint32_t sysclk_freq; /* 系统时钟频率 (Hz) */
uint32_t hclk_freq; /* AHB总线频率 (Hz) */
uint32_t pclk1_freq; /* APB1总线频率 (Hz) */
uint32_t pclk2_freq; /* APB2总线频率 (Hz) */
uint8_t flash_ws; /* Flash等待周期 */
} clock_config_t;
bool hal_clock_init(const clock_config_t *config);
uint32_t hal_get_sysclk_freq(void);
/* 统一的GPIO接口 */
typedef enum {
HAL_GPIO_MODE_INPUT = 0,
HAL_GPIO_MODE_OUTPUT_PP,
HAL_GPIO_MODE_OUTPUT_OD,
HAL_GPIO_MODE_AF_PP,
HAL_GPIO_MODE_AF_OD,
} hal_gpio_mode_t;
typedef enum {
HAL_GPIO_SPEED_LOW = 0,
HAL_GPIO_SPEED_MEDIUM,
HAL_GPIO_SPEED_HIGH,
} hal_gpio_speed_t;
void hal_gpio_init(uint32_t port, uint32_t pin, hal_gpio_mode_t mode, hal_gpio_speed_t speed);
void hal_gpio_write(uint32_t port, uint32_t pin, bool value);
bool hal_gpio_read(uint32_t port, uint32_t pin);
/* 统一的Flash接口 */
#define HAL_FLASH_PAGE_SIZE 2048 /* 统一使用GD32的2KB页大小 */
bool hal_flash_erase_page(uint32_t page_addr);
bool hal_flash_write_word(uint32_t addr, uint32_t data);
bool hal_flash_write_buffer(uint32_t addr, const uint32_t *data, uint32_t word_count);
/* 统一的定时器接口 */
bool hal_timer_init(uint32_t timer_id, uint32_t freq_hz, void (*callback)(void));
void hal_timer_start(uint32_t timer_id);
void hal_timer_stop(uint32_t timer_id);
7.2 平台相关实现(GD32)
/* hal_gd32f303.c — GD32平台实现 */
#include "hal_platform.h"
#if PLATFORM_GD32
bool hal_clock_init(const clock_config_t *config)
{
(void)config; /* 使用固定配置,实际项目中可扩展 */
/* 启用HSE */
rcu_osci_on(RCU_HXTAL);
rcu_osci_stab_wait(RCU_HXTAL);
/* 配置PLL:8MHz * 15 = 120MHz */
rcu_pll_config(RCU_PLLSRC_HXTAL, RCU_PLL_MUL15);
rcu_osci_on(RCU_PLL_CK);
rcu_osci_stab_wait(RCU_PLL_CK);
/* Flash等待周期:3 WS for 120MHz */
fmc_wscnt_set(WS_WSCNT_3);
/* 切换时钟源 */
rcu_system_clock_source_config(RCU_CKSYSSRC_PLL);
while (RCU_SCSS_PLL != rcu_system_clock_source_get()) {
/* 等待切换完成 */
}
/* 总线分频 */
rcu_ahb_clock_config(RCU_AHB_CKSYS_DIV1);
rcu_apb1_clock_config(RCU_APB1_CKAHB_DIV2);
rcu_apb2_clock_config(RCU_APB2_CKAHB_DIV1);
SystemCoreClock = 120000000;
return true;
}
uint32_t hal_get_sysclk_freq(void)
{
return SystemCoreClock;
}
void hal_gpio_init(uint32_t port, uint32_t pin, hal_gpio_mode_t mode, hal_gpio_speed_t speed)
{
uint32_t gpio_mode, gpio_speed;
/* 映射模式 */
switch (mode) {
case HAL_GPIO_MODE_INPUT: gpio_mode = GPIO_MODE_IN_FLOATING; break;
case HAL_GPIO_MODE_OUTPUT_PP: gpio_mode = GPIO_MODE_OUT_PP; break;
case HAL_GPIO_MODE_OUTPUT_OD: gpio_mode = GPIO_MODE_OUT_OD; break;
case HAL_GPIO_MODE_AF_PP: gpio_mode = GPIO_MODE_AF_PP; break;
case HAL_GPIO_MODE_AF_OD: gpio_mode = GPIO_MODE_AF_OD; break;
default: gpio_mode = GPIO_MODE_IN_FLOATING; break;
}
/* 映射速度 */
switch (speed) {
case HAL_GPIO_SPEED_LOW: gpio_speed = GPIO_OSPEED_2MHZ; break;
case HAL_GPIO_SPEED_MEDIUM: gpio_speed = GPIO_OSPEED_10MHZ; break;
case HAL_GPIO_SPEED_HIGH: gpio_speed = GPIO_OSPEED_50MHZ; break;
default: gpio_speed = GPIO_OSPEED_2MHZ; break;
}
/* 启用时钟并初始化 */
if (port == GPIOA) rcu_periph_clock_enable(RCU_GPIOA);
else if (port == GPIOB) rcu_periph_clock_enable(RCU_GPIOB);
else if (port == GPIOC) rcu_periph_clock_enable(RCU_GPIOC);
/* ... 其他端口 */
gpio_init((uint32_t)port, gpio_mode, gpio_speed, (uint32_t)pin);
}
void hal_gpio_write(uint32_t port, uint32_t pin, bool value)
{
if (value) {
gpio_bit_set((uint32_t)port, (uint32_t)pin);
} else {
gpio_bit_reset((uint32_t)port, (uint32_t)pin);
}
}
bool hal_gpio_read(uint32_t port, uint32_t pin)
{
return (gpio_input_bit_get((uint32_t)port, (uint32_t)pin) != RESET);
}
bool hal_flash_erase_page(uint32_t page_addr)
{
if (page_addr % HAL_FLASH_PAGE_SIZE != 0) {
return false; /* 地址未对齐 */
}
fmc_unlock();
fmc_page_erase(page_addr);
fmc_state_enum status = fmc_ready_wait(FMC_TIMEOUT_COUNT);
fmc_lock();
return (status == FMC_READY);
}
bool hal_flash_write_word(uint32_t addr, uint32_t data)
{
fmc_unlock();
fmc_word_program(addr, data);
fmc_state_enum status = fmc_ready_wait(FMC_TIMEOUT_COUNT);
fmc_lock();
return (status == FMC_READY);
}
bool hal_flash_write_buffer(uint32_t addr, const uint32_t *data, uint32_t word_count)
{
fmc_unlock();
for (uint32_t i = 0; i < word_count; i++) {
fmc_word_program(addr + i * 4, data[i]);
if (i % 8 == 0) {
fmc_state_enum status = fmc_ready_wait(FMC_TIMEOUT_COUNT);
if (status != FMC_READY) {
fmc_lock();
return false;
}
}
}
fmc_lock();
return true;
}
#endif /* PLATFORM_GD32 */
八、迁移检查清单与调试排错
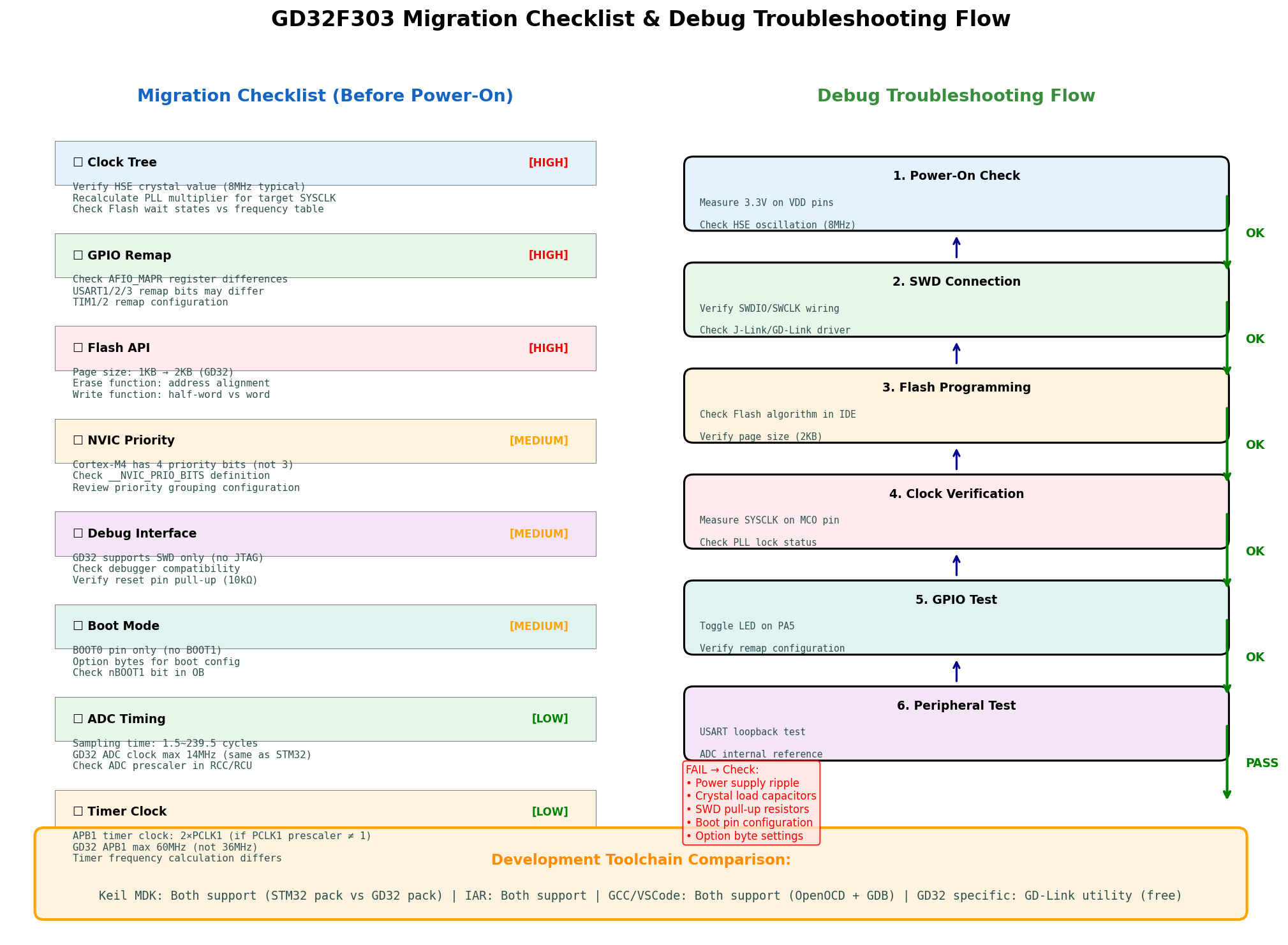
8.1 上电前检查清单
| 检查项 | 优先级 | 检查内容 |
|---|---|---|
| 时钟树 | HIGH | 确认HSE晶振值,重新计算PLL倍频系数,检查Flash等待周期 |
| GPIO重映射 | HIGH | 核对AFIO重映射寄存器位定义,验证USART/TIM引脚 |
| Flash API | HIGH | 确认页大小(2KB),修改擦除/写入地址对齐逻辑 |
| NVIC优先级 | MEDIUM | 确认Cortex-M4的4位优先级,检查分组配置 |
| 调试接口 | MEDIUM | 确认SWD连接,准备GD-Link或J-Link |
| Boot模式 | MEDIUM | 确认BOOT0引脚电平,检查Option Byte配置 |
| ADC时序 | LOW | 确认采样时间,验证ADC时钟预分频 |
| 定时器时钟 | LOW | 重新计算APB1定时器频率,调整预分频和周期 |
8.2 调试排错流程
- 上电检查:测量3.3V电源,确认HSE晶振起振(8MHz)
- SWD连接:验证SWDIO/SWCLK接线,安装GD-Link驱动
- Flash编程:确认IDE中的Flash算法为GD32F303(2KB page)
- 时钟验证:通过MCO引脚输出SYSCLK,示波器测量频率
- GPIO测试:控制LED闪烁,验证基本GPIO功能
- 外设测试:USART回环测试、ADC内部参考电压读取
8.3 常见问题排查
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 程序无法启动,HardFault | Flash等待周期不足 | 增加fmc_wscnt_set()参数 |
| 定时器频率不正确 | APB1定时器时钟计算错误 | 重新计算预分频和周期值 |
| Flash擦除失败 | 地址未按2KB对齐 | 确保地址为0x0800_0000 + n×2048 |
| USART无输出 | GPIO重映射配置错误 | 使用gpio_pin_remap_config() |
| 调试器无法连接 | JTAG未禁用,SWD未启用 | 配置Option Byte,禁用JTAG |
| ADC读数漂移 | 采样时间不足 | 增加ADC采样周期数 |
九、总结:国产替代的技术进化论
GD32F303替代STM32F103,不是简单的"换芯片",而是一次系统级的技术迁移。从本文的分析可以看出,真正的挑战不在于引脚兼容性,而在于:
- 时钟架构的重新设计:从72MHz到120MHz,PLL倍频、总线分频、Flash等待周期都需要重新计算
- 存储子系统的适配:2KB页大小影响Bootloader、参数存储、OTA升级等所有Flash操作
- 外设寄存器的差异:AFIO重映射、GPIO速度、定时器时钟源等细节需要逐一核对
- 工具链的切换:从STM32CubeIDE到Keil+GD32 Pack,或VSCode+GCC+OpenOCD
- 调试方法的调整:从JTAG到SWD,从4个断点到6个断点
本文完整迁移代码和抽象层设计已按MIT协议开源,包含STM32F103和GD32F303的双平台支持、统一的HAL接口、以及经过验证的Flash操作和时钟配置。
国产替代的大趋势不可逆转,但替代的过程需要工程师具备深入理解芯片架构的能力,而不是停留在"调包"和"焊板子"的层面。每一行寄存器的差异,都是工程师技术深度的试金石。
转载自:https://blog.csdn.net/u014727709/article/details/162202001
欢迎 👍点赞✍评论⭐收藏,欢迎指正

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 4
4 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)