STM32F407 从零上路 ③:定时器入门——从延时到 PWM 呼吸灯
前言
前面我们用 HAL_Delay() 做过延时,但 HAL_Delay() 有一个严重问题:它在等的时候,CPU 什么也做不了。更精确、更灵活的计时要靠硬件定时器。
定时器是 STM32 最强大的外设之一。这一篇我们从最基础的定时中断开始,一路做到 PWM 呼吸灯。
一、F407 的定时器家族
F407 有 14 个定时器,分三类:
| 类型 | 编号 | 位数 | 主要用途 |
|---|---|---|---|
| 高级定时器 | TIM1、TIM8 | 16 位 | PWM、互补输出、刹车、死区(电机控制) |
| 通用定时器 | TIM2、TIM5 | 32 位 | 定时中断、PWM、输入捕获 |
| 通用定时器 | TIM3、TIM4 | 16 位 | 定时中断、PWM、输入捕获 |
| 通用定时器 | TIM9~TIM14 | 16 位 | 定时中断、PWM |
| 基本定时器 | TIM6、TIM7 | 16 位 | 纯粹定时,无外部 IO |
仅 TIM2 和 TIM5 是 32 位,TIM3/TIM4 是 16 位通用定时器。这是 F407 相较 F103 的重要差异——F103 的 TIM2~TIM5 全是 16 位,而 F407 的 TIM2/TIM5 升级到了 32 位。
二、定时器的工作原理
打个比方:
你每秒往碗里丢一颗豆子,规定碗里装 1000 颗时响铃,然后清空碗重新数。这就是定时器。
在 STM32 里:
-
时钟源:你的手(丢豆子的速度)
-
计数器(CNT):碗里的豆子数
-
自动重装载值(ARR):碗的容量(1000)
-
更新事件(溢出):响铃
定时时间公式:
定时时间 = (ARR + 1) × (PSC + 1) / 定时器时钟频率
其中:
-
PSC(Prescaler):预分频系数,把定时器时钟降到你需要的频率
-
ARR(Auto-Reload):计数值,计到 ARR 就溢出
例子: 需要一个 1 秒的定时中断
定时器时钟 = 84MHz(APB1,TIM2~TIM5) 目标频率 = 1Hz(1秒) 分频方式:(PSC + 1) × (ARR + 1) = 84,000,000 常用的分法: PSC = 8399 → 分频后 10kHz(0.1ms 一跳) ARR = 9999 → 计 10000 次后溢出,即 1 秒
验证:(8399+1) × (9999+1) / 84,000,000 = 1.0s ✓
三、CubeMX 配置:定时中断
3.1 选择定时器
用 TIM2(通用 32 位定时器,挂在 APB1 上,时钟 84MHz)。
3.2 参数设置
在 Pinout & Configuration → Timers → TIM2:
-
Clock Source:选择 Internal Clock
-
Prescaler(PSC):
8400 - 1(CubeMX 中填入8399,即计算值减 1;寄存器从 0 开始计数,实际分频 = 8399 + 1 = 8400,分频到 10kHz) -
Counter Mode:Up
-
Counter Period(ARR):
10000 - 1(产生 10kHz / 10000 = 1Hz) -
Auto-reload preload:Enable
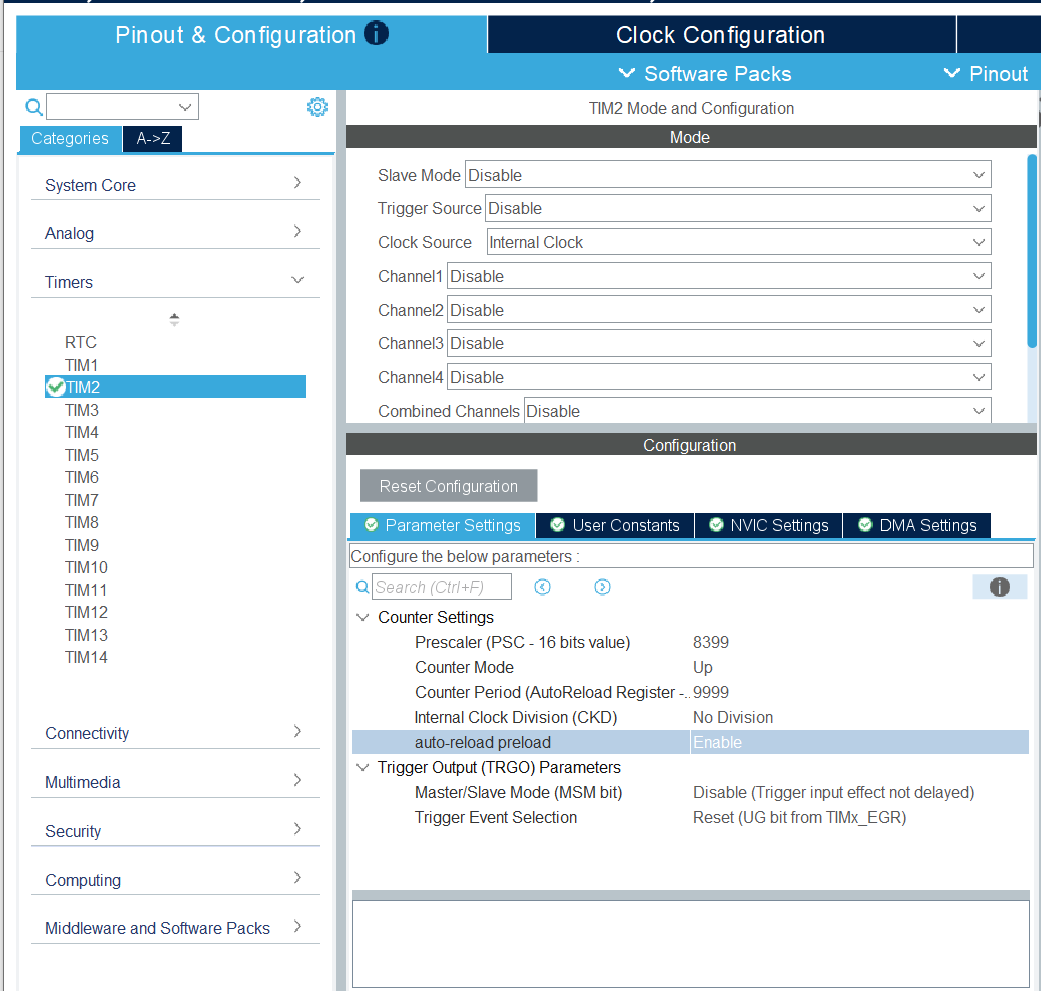
为什么写成
8400-1和10000-1?因为寄存器从 0 开始计数,设 8400-1 实际是 0~8399 共 8400 个时钟周期。
3.3 使能中断
切换到 NVIC Settings 标签 → 勾选 TIM2 global interrupt → Enabled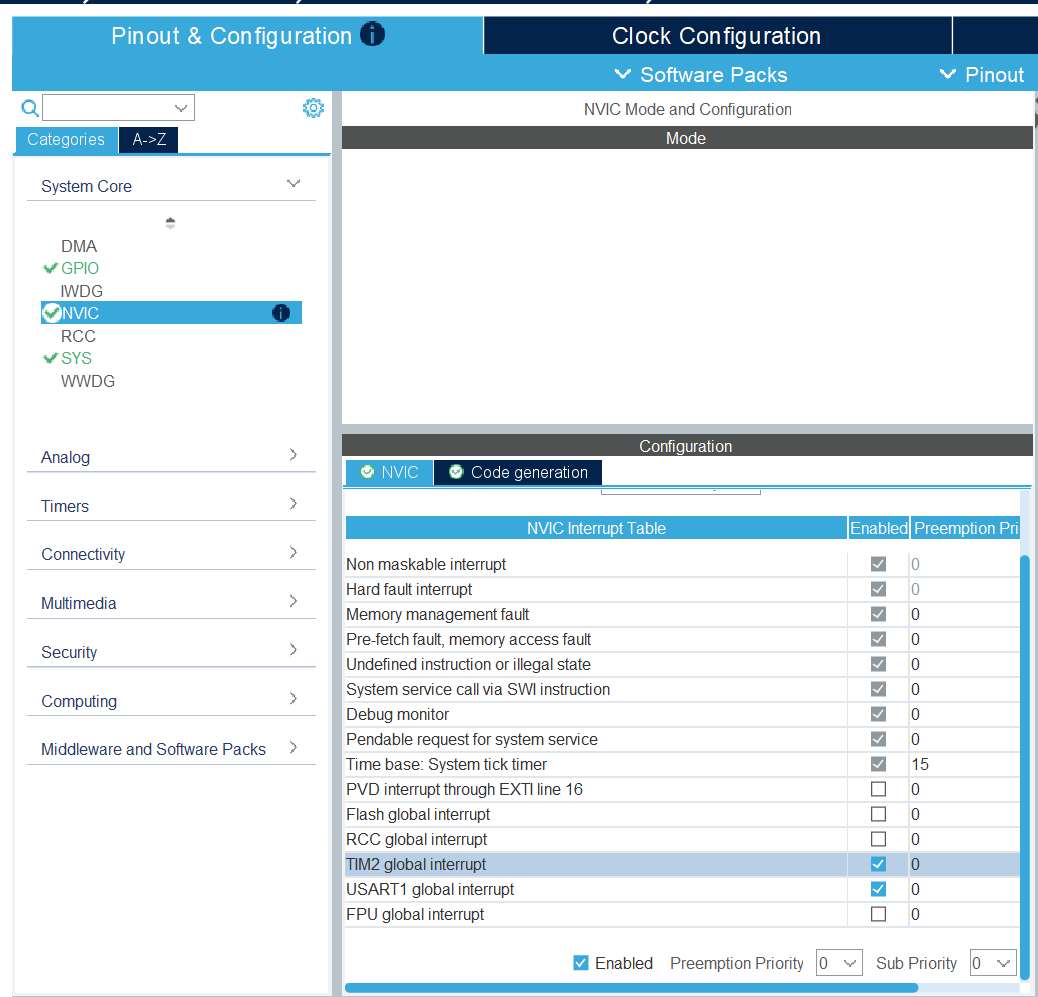
3.4 生成代码
Ctrl+S → GENERATE CODE
四、代码:定时中断翻转 LED
在 main() 中启动定时器:
/* USER CODE BEGIN 2 */ HAL_TIM_Base_Start_IT(&htim2); // 启动定时器中断 /* USER CODE END 2 */
添加中断回调函数:
/* USER CODE BEGIN 4 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM2)
{
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); // 1 秒翻转一次
}
}
/* USER CODE END 4 */
编译下载,LED 应该以 2 秒为周期翻转(1s 亮 + 1s 灭)。
这和 HAL_Delay() 有什么区别?
| 方式 | 优缺点 |
|---|---|
HAL_Delay(500) + TogglePin |
延时期间 CPU 空转,什么都不能干 |
| 定时器中断 | CPU 在主循环里可以干别的事,中断来了才切换 LED |
// 定时器方案:主循环可以处理其他任务
while (1)
{
// 处理按键、读取传感器、更新屏幕……
// LED 的翻转由硬件定时器在后台完成
}
五、PWM 输出——呼吸灯
5.1 什么是 PWM?
PWM(脉冲宽度调制):快速切换高低电平,通过改变占空比(高电平时间占比)模拟出不同的"电压"。
占空比 0%: ━━━━━━━━━━━━━━ 一直低(灭) 占空比 25%: ▇▇▇▇▂▂▂▂▂▂▂▂ 大部分时间低(微亮) 占空比 50%: ▇▇▇▇▇▇▂▂▂▂▂▂ 一半时间高(半亮) 占空比 75%: ▇▇▇▇▇▇▇▇▇▇▂▂ 大部分时间高(很亮) 占空比 100%: ▇▇▇▇▇▇▇▇▇▇▇▇ 一直高(最亮)
人眼有视觉暂留效应,PWM 频率 > 50Hz 时就感觉不到闪烁,只感受到平均亮度。
5.2 PWM 和定时器的关系
通道输出 PWM 不需要中断,完全由硬件自动完成——CPU 只需要设一下占空比(CCR 寄存器),计时器自己会翻转引脚。
计数器从 0 到 ARR 递增 当 CNT < CCR 时,输出高电平 当 CNT ≥ CCR 时,输出低电平
5.3 CubeMX 配置 PWM
用 TIM3(挂在 APB1 上,84MHz),选择一个支持 PWM 输出的引脚(查 datasheet 的 Alternate Function 表)。
以 PB0(TIM3_CH3) 为例:
-
左侧选 TIM3
-
Clock Source:Internal Clock
-
Channel3:PWM Generation CH3
-
参数设置:
-
Prescaler(PSC):
84 - 1(分频到 1MHz) -
Counter Mode:Up
-
Counter Period(ARR):
1000 - 1(PWM 频率 = 1MHz / 1000 = 1kHz) -
Auto-reload preload:Enable
-
Pulse(CCR):
500(初始占空比 50%)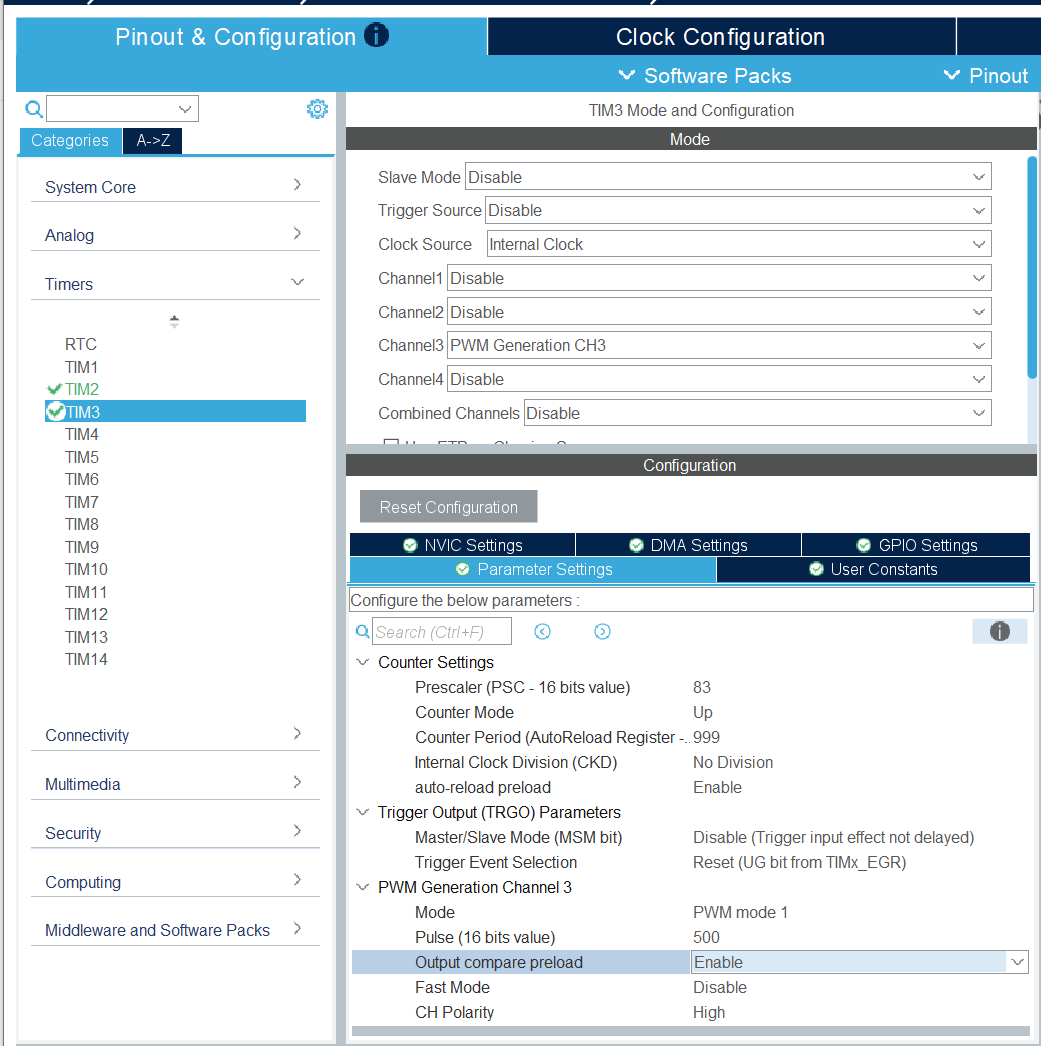
-
-
在 NVIC Settings 不需要勾选任何中断(PWM 不需要中断)
-
图中 PB0 自动变成 TIM3_CH3
PWM 频率 = 定时器时钟 / (PSC+1) / (ARR+1) = 84MHz / 84 / 1000 = 1kHz — 人眼看不到闪烁。
5.4 代码:呼吸灯
/* USER CODE BEGIN 2 */ HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_3); // 启动 PWM 输出 /* USER CODE END 2 */
主循环中改变占空比实现呼吸效果:
/* USER CODE BEGIN 3 */
uint16_t duty = 0;
uint8_t direction = 1; // 1=变亮, 0=变暗
while (1)
{
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3, duty);
if (direction)
duty += 5;
else
duty -= 5;
if (duty >= 1000)
direction = 0;
if (duty == 0)
direction = 1;
HAL_Delay(10); // 每 10ms 调整一次
}
/* USER CODE END 3 */
LED 引脚接 PB0(加上限流电阻),应该能看到 LED 从暗→亮→暗循环呼吸。
如果亮度变化不明显,试试把
duty += 5改成+= 2,减少步进值,过渡更平滑。
六、PWM 的其他应用
PWM 不只是用来点灯的:
| 应用 | 原理 |
|---|---|
| 舵机控制 | 20ms 周期,1ms=0°,1.5ms=90°,2ms=180° |
| 电机调速 | 占空比越大,电机转速越快 |
| 有源蜂鸣器 | 不同频率发出不同音调(乐谱) |
| LED 调光 | 改变亮度,调色温 |
| 模拟音频 | 高速 PWM + 低通滤波 ≈ DAC |
七、常见坑
| 问题 | 原因 |
|---|---|
| 定时器中断没触发 | NVIC 没勾选、没调 HAL_TIM_Base_Start_IT() |
| 定时时间不准 | PSC 和 ARR 忘记减 1(寄存器从 0 开始) |
| PWM 引脚没输出 | 忘了配 Alternate Function、引脚选错了 |
| LED 一直最亮不呼吸 | 占空比自动重装载没开(Auto-reload preload = Disable) |
| 呼吸频率不对 | HAL_Delay(10) 加上循环里的计算时间,实际周期会偏慢 |
八、总结
| 概念 | 要点 |
|---|---|
| 定时中断 | PSC 分频 + ARR 计数 → 周期执行代码 |
| PWM | 硬件自动翻转引脚 → CPU 只需改占空比 |
| 32 位定时器 | TIM2 和 TIM5 可以计数到 2^32,几乎不可能溢出;TIM3/TIM4 是 16 位 |
练习:
-
把定时中断改成 10ms 触发一次,在主循环中累计变量实现秒级计时
-
尝试用两个定时器分别输出两个不同频率的 PWM,控制两个 LED 各自呼吸
-
把呼吸频率调快(减
HAL_Delay),看看多快会开始闪烁(找到人眼视觉暂留的极限)
下一篇我们引入 外部中断 + 按键消抖,让 STM32 学会"响应外部事件"。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 8
8 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)