树莓派ROS2自动定位与导航小车开发教程—想从事机器人行业必学
ROS2 自动定位与导航小车 — 完整知识手册
树莓派 4B + Ubuntu 24.04 + ROS2 Jazzy + STM32F103 + 激光雷达
从零搭建一台能自主导航的 ROS2 小车
第 1 章:树莓派 4B 环境搭建
本章目标: 给树莓派 4B 装上 Ubuntu 24.04 系统,能通过电脑 SSH 远程连接。
1.1 烧录系统
所需工具
| 工具 | 作用 |
|---|---|
| Raspberry Pi Imager | 烧录系统到 SD 卡 |
| SD 卡(32G 以上) | 存储系统 |
| IP Scanner | 扫描树莓派 IP |
| MobaXterm | SSH 远程连接 |
烧录步骤
- PC 插入 SD 卡
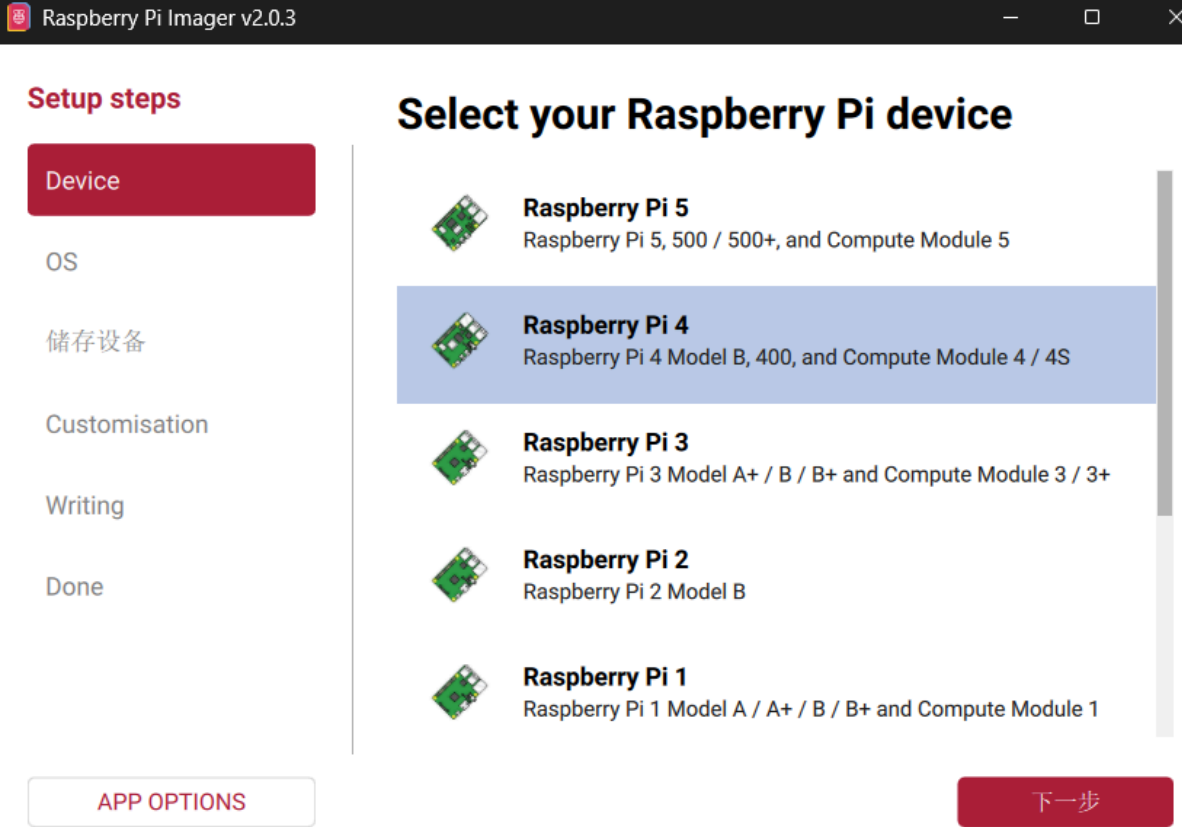
- 打开 Pi Imager
- Device: Raspberry Pi 4
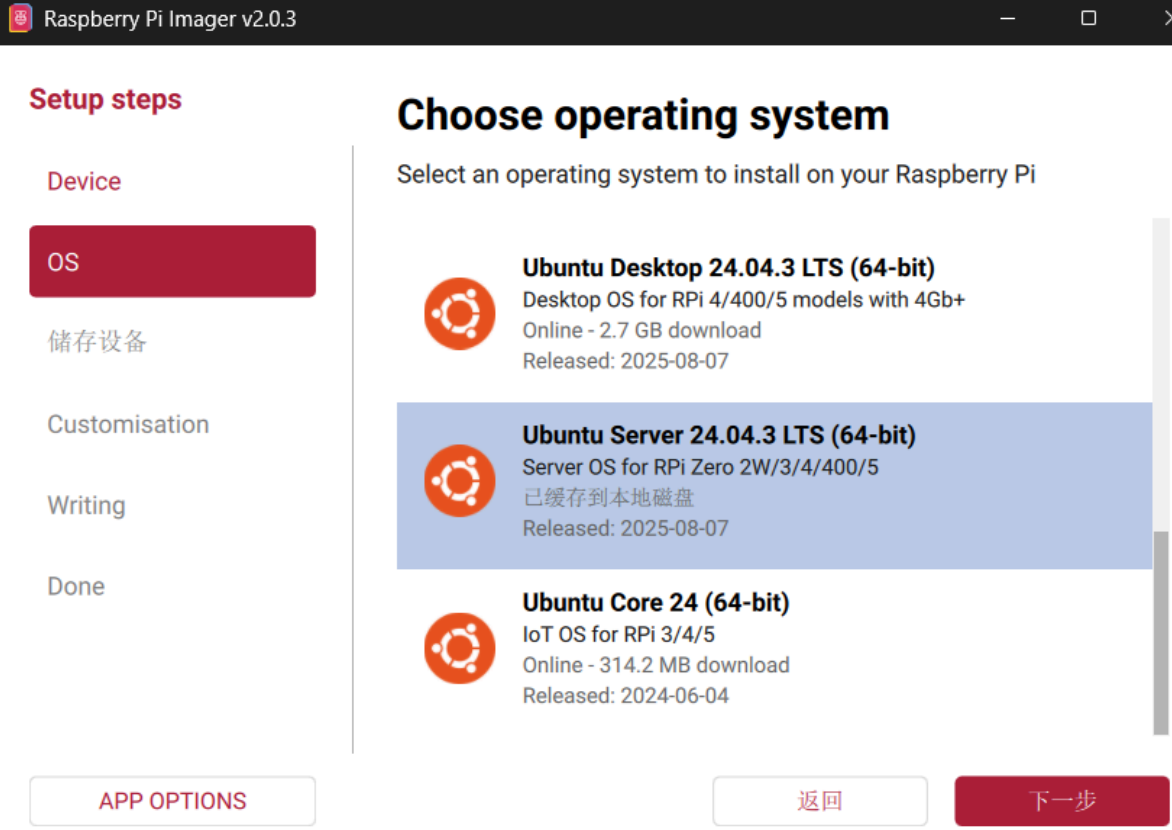
- OS: Other general purpose OS → Ubuntu → Ubuntu Server 24.04.3 LTS (64-bit)
 - SD Card: 你的 SD 卡
- SD Card: 你的 SD 卡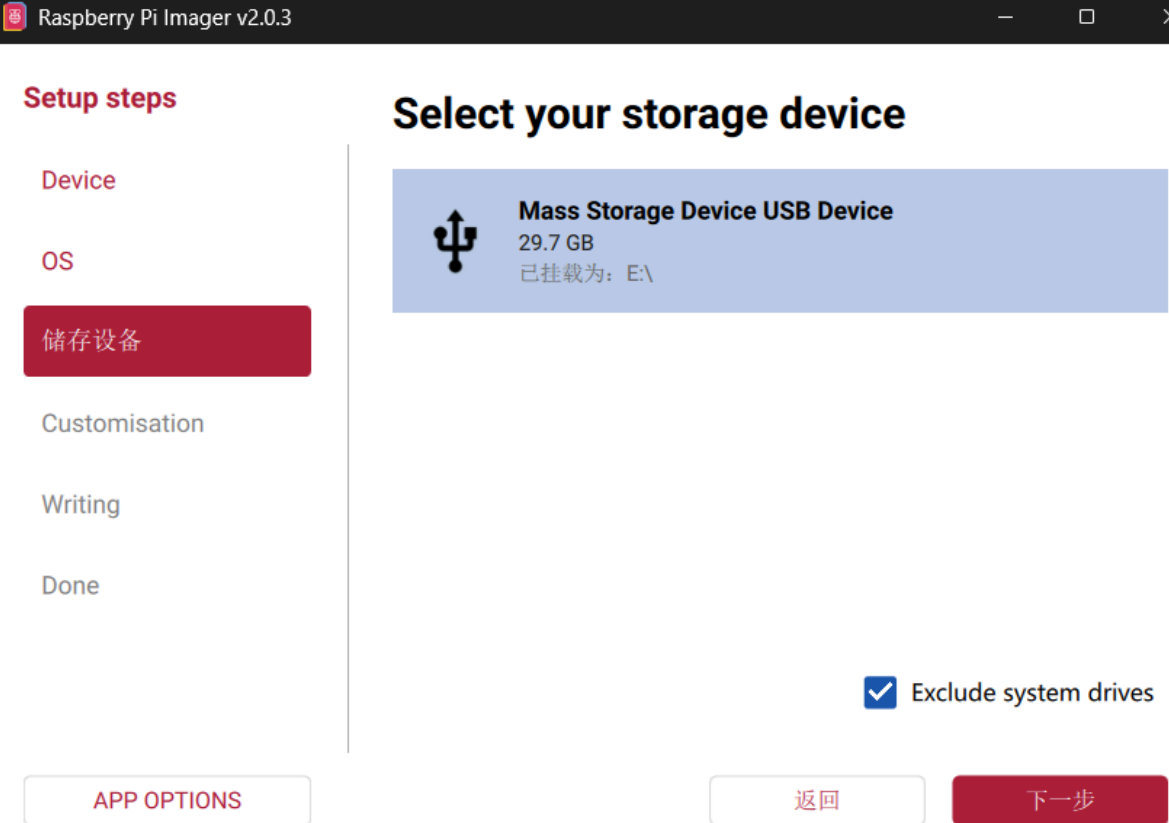
- Device: Raspberry Pi 4
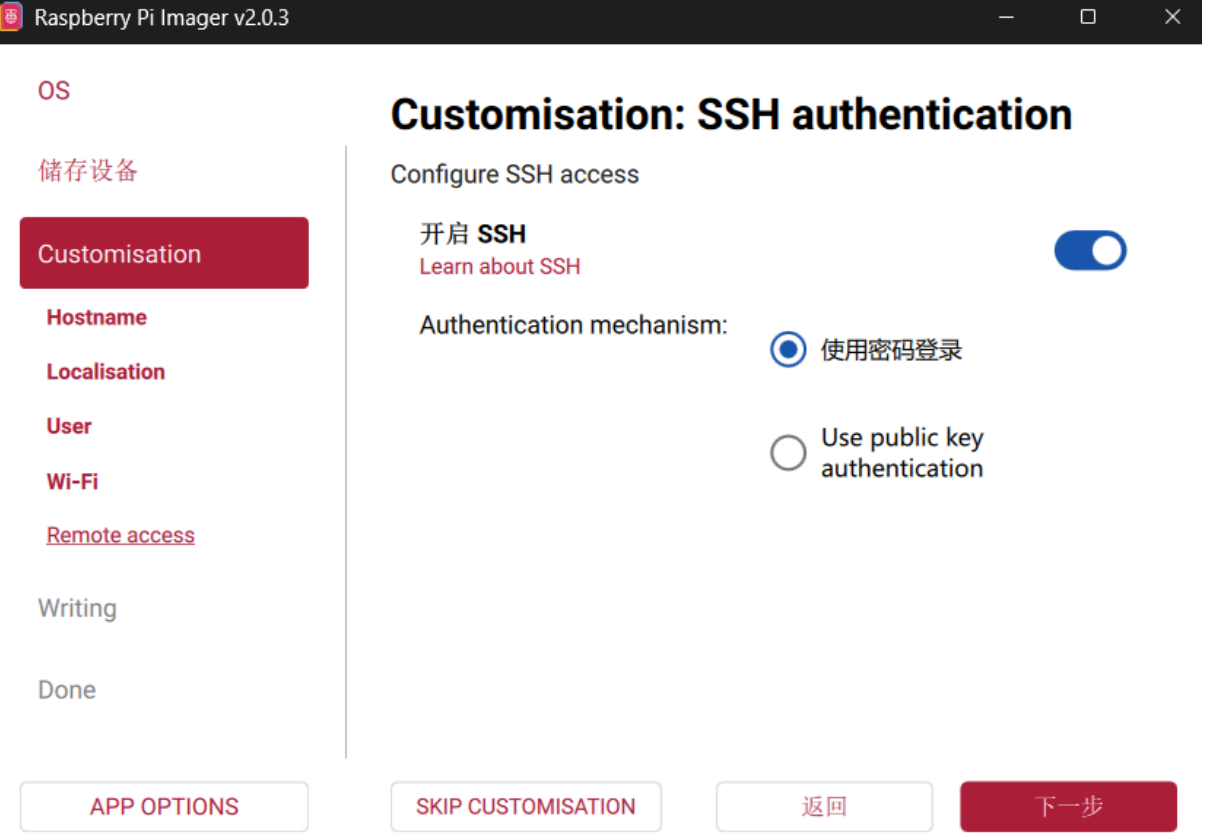
- 点击 NEXT → Edit Settings,设置 WiFi 名称和密码,开启 SSH
- 点击 WRITE → 等待烧录完成
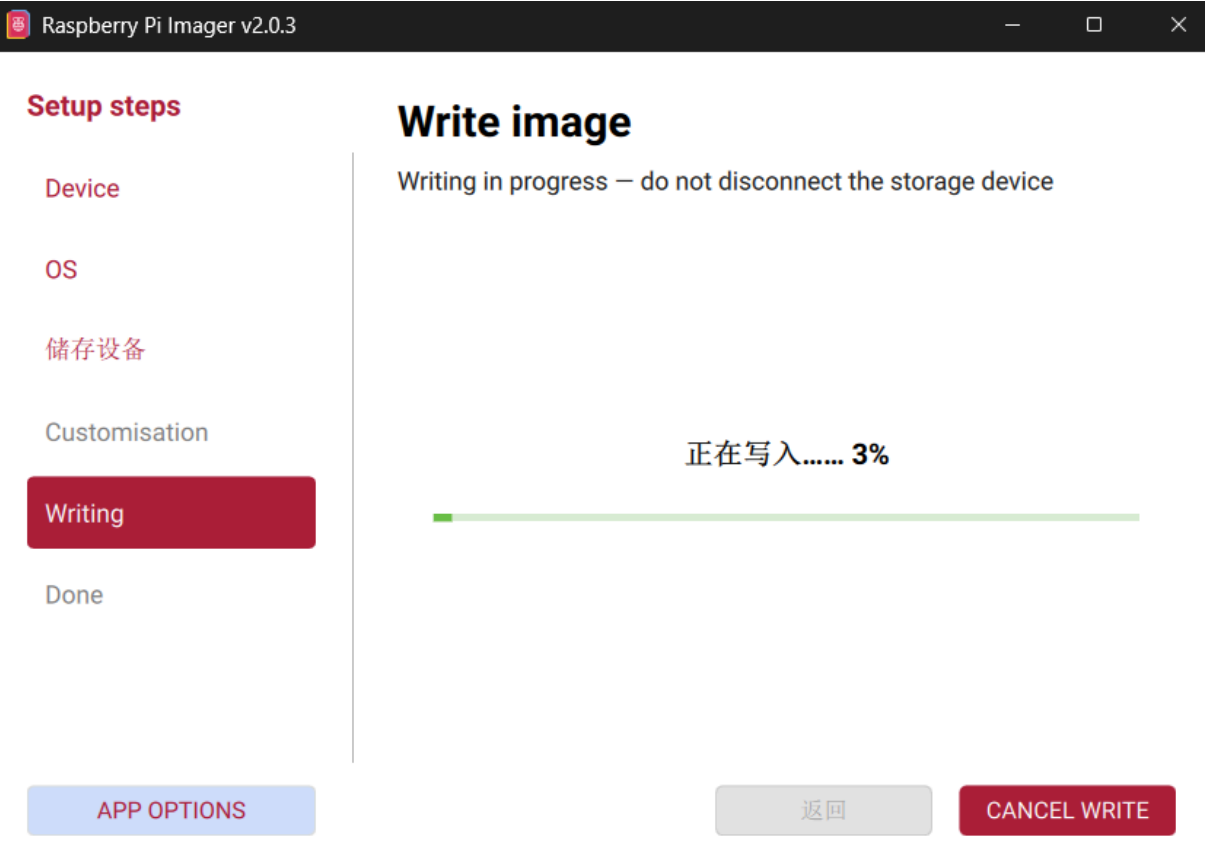
- SD 卡插入树莓派 4B → 上电
查找树莓派 IP
-
手机/电脑连接同一个 WiFi
-
打开 IP Scanner,扫描
192.168.<WiFi>网段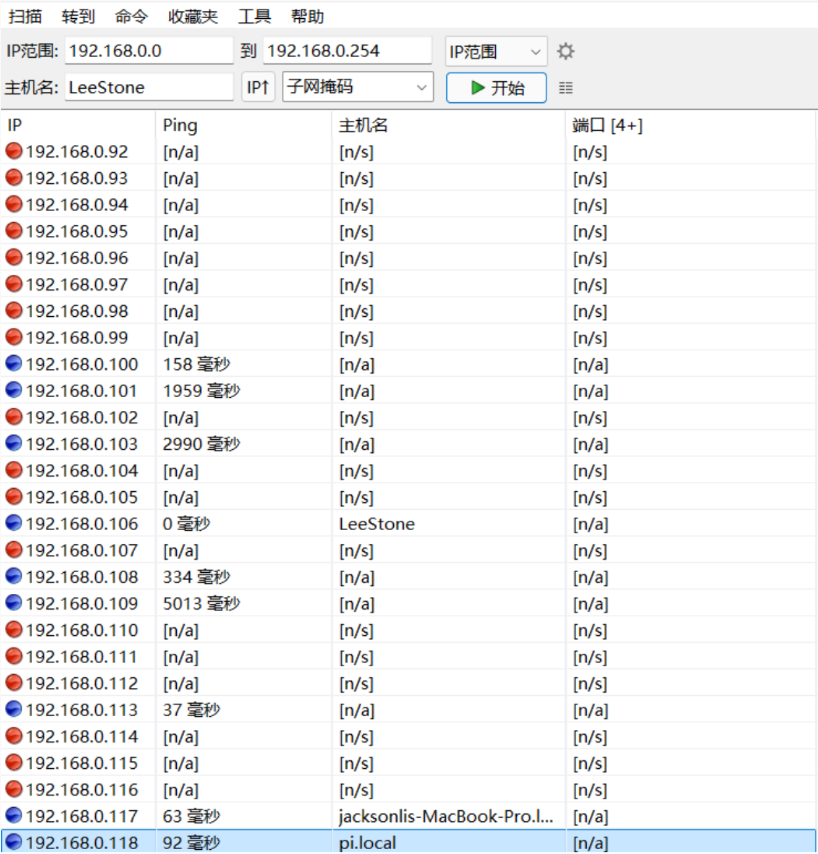
-
找到设备名称为
raspberrypi的 IP -
记下这个 IP
SSH 远程连接
打开 MobaXterm → Session → SSH,输入 IP 地址 → 22 端口 → OK
用户名:ubuntu,密码:ubuntu(首次登录会要求修改)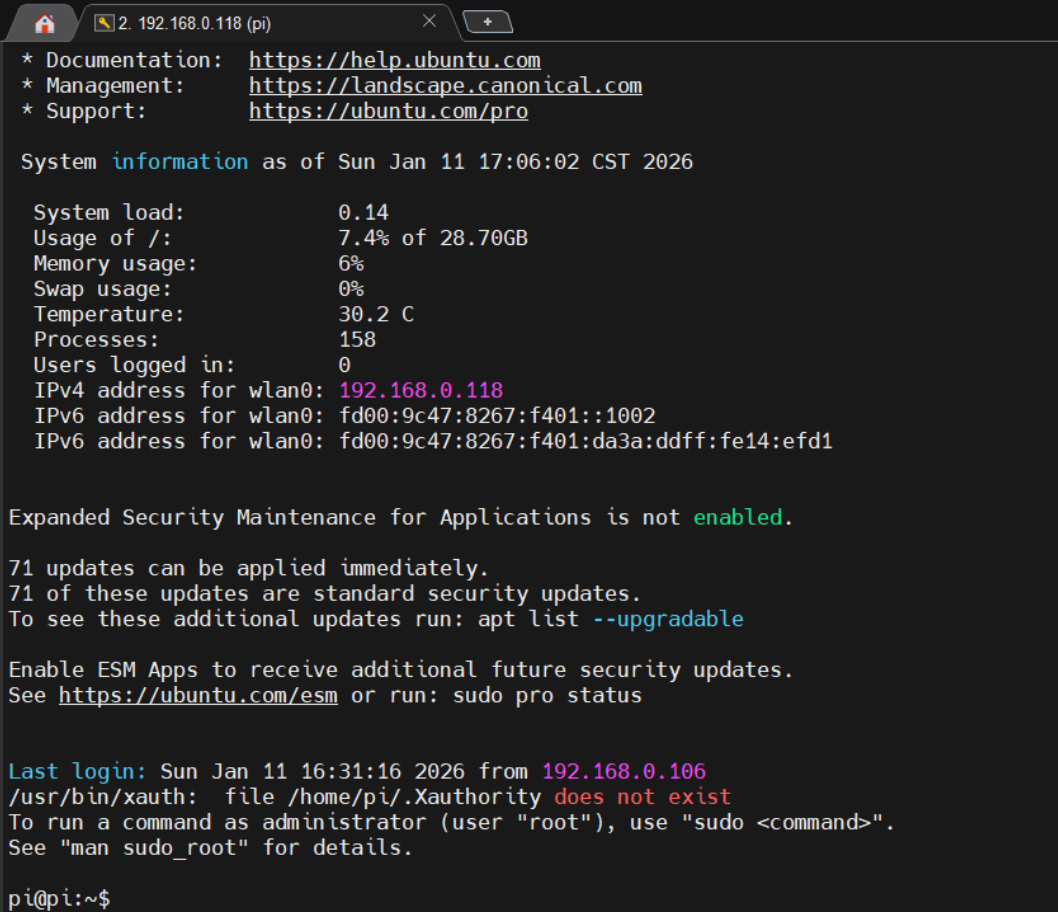
1.2 安装 ROS2 Jazzy
# 一键安装 ROS(推荐)
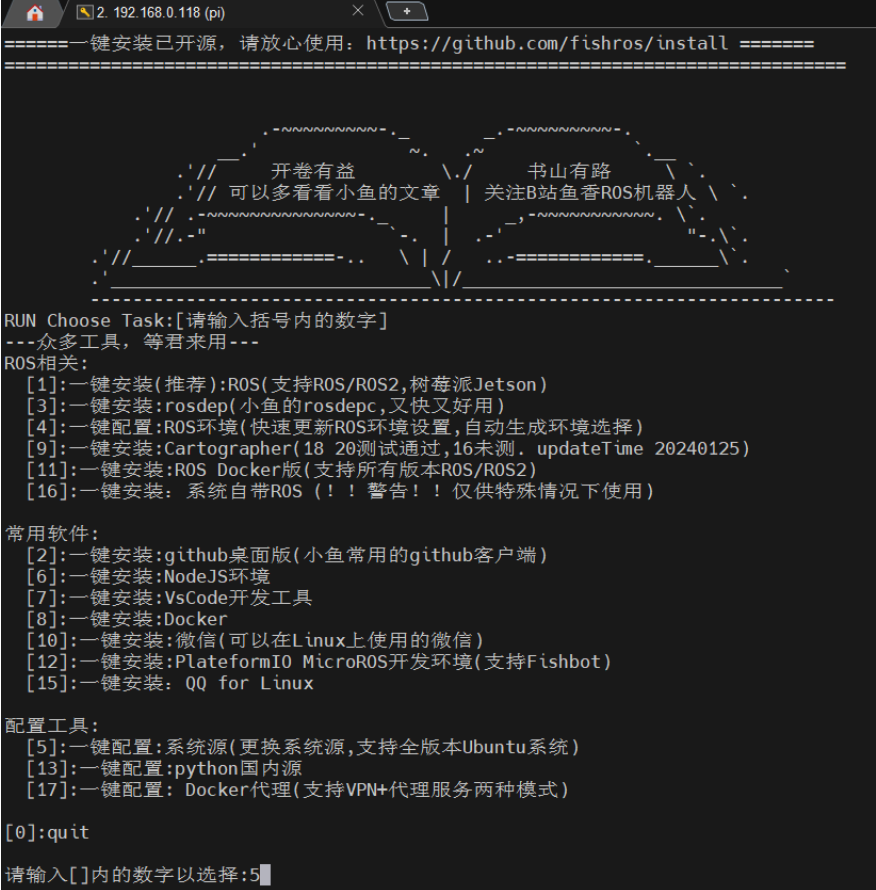
wget http://fishros.com/install -O fishros && . fishros ## 鱼香ROS开源的一键安装工具
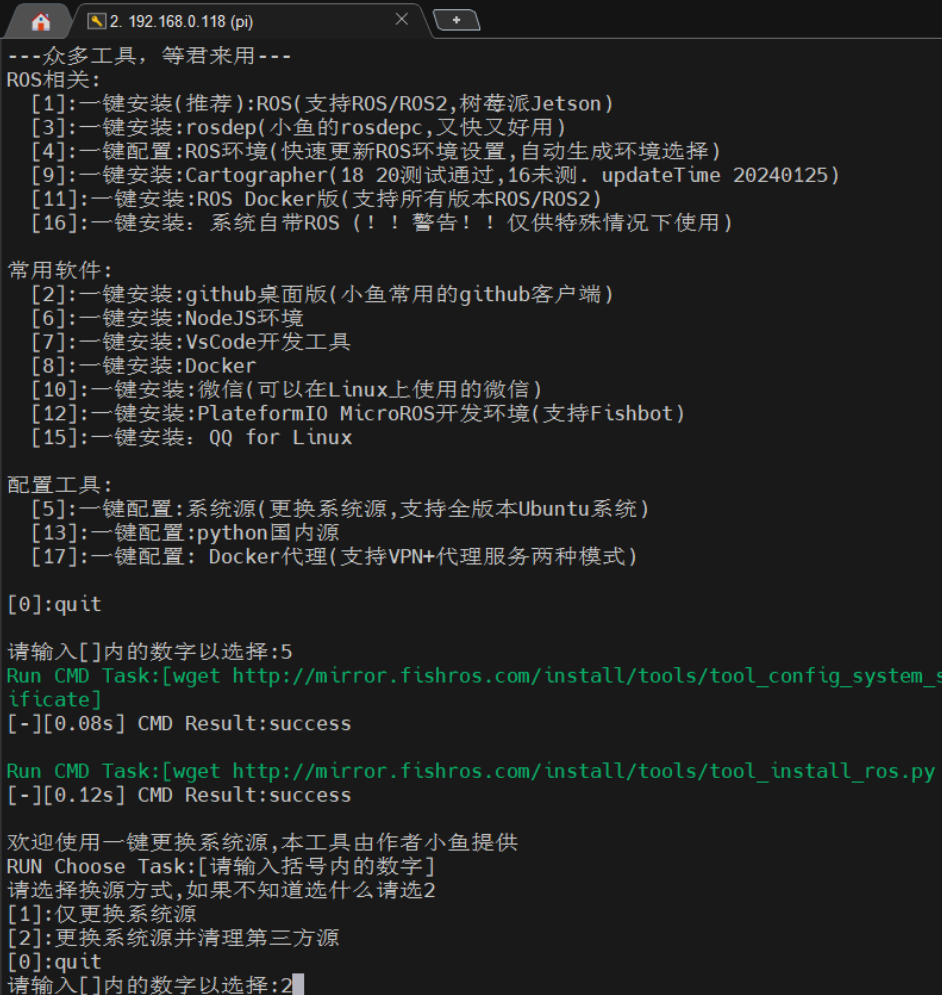
输入密码后选择 [5]一键配置:系统源 。
接着选择 [2]:更换系统源并清理第三方源 。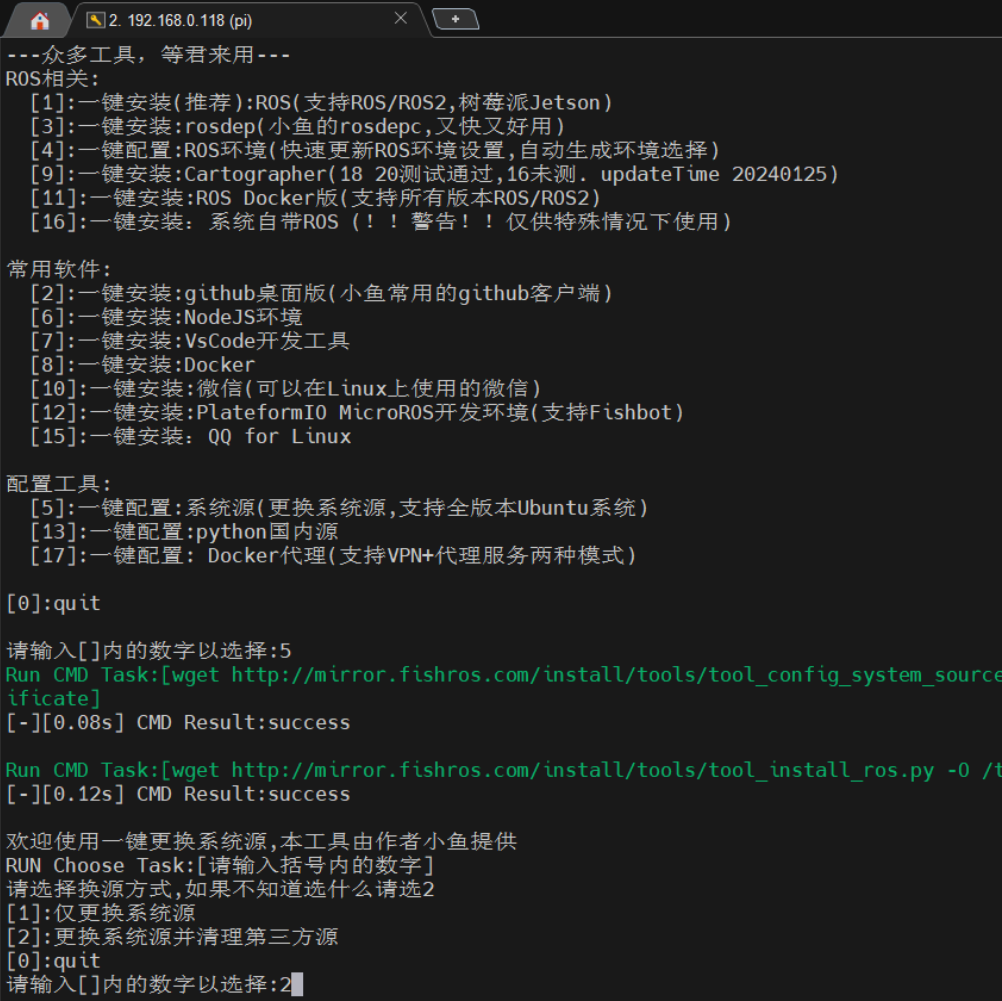
完成后选择 [2]:不添加ROS/ROS2源 。
更新软件包:
输入以下命令:
sudo apt update && sudo apt upgrade -y
编译并安装 raspberrypi-lvgl-terminal(树莓派4B终端) :
输入以下命令:
cd ~
sudo apt install git
git clone https://github.com/CaddonThaw/raspberrypi-lvgl-terminal.git
./scripts/build.sh
sudo ./scripts/install.sh --enable
等待安装完成后可以看到显示的画面: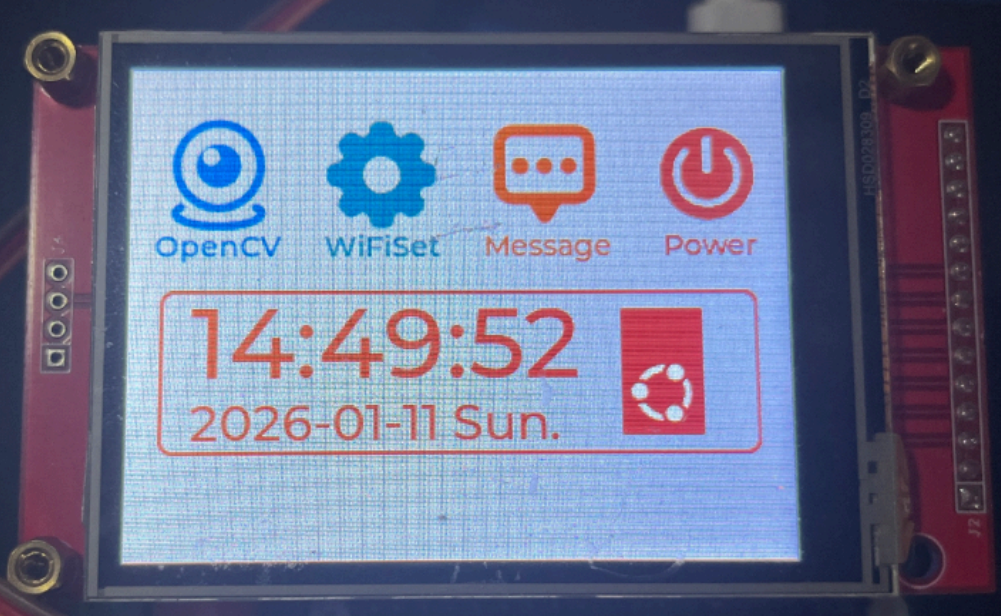
# 验证
ros2 run turtlesim turtlesim_node
能看到小海龟窗口则安装成功。
1.3 固定 USB 设备名
激光雷达和 STM32 通过 USB 连接树莓派,默认名称为 ttyUSB0/ttyUSB1。每次插入顺序不同,名称可能互换。
解决方案: 编写 udev 规则,根据 USB 芯片 ID 固定设备名。
# 查看 USB 设备 ID
lsusb
# 输出示例:
# Bus 001 Device 014: ID 1a86:7523 ← 激光雷达
# Bus 001 Device 015: ID 1a86:7523 ← STM32
# 创建 udev 规则
sudo touch /etc/udev/rules.d/stm32_dev.rules
sudo nano /etc/udev/rules.d/stm32_dev.rules
写入:
KERNEL=="ttyUSB0", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="7523", MODE:="0777", SYMLINK+="laser_scan"
KERNEL=="ttyUSB1", ATTRS{idVendor}=="1a86", ATTRS{idProduct}=="7523", MODE:="0777", SYMLINK+="stm32_dev"
生效:
sudo udevadm control --reload-rules
sudo udevadm trigger
ls -l /dev/ | grep laser_scan
ls -l /dev/ | grep stm32_dev
效果: 激光雷达永远固定在 /dev/laser_scan,STM32 固定在 /dev/stm32_dev。
第 2 章:虚拟机 Ubuntu 24.04 环境搭建
本章目标: 在 Windows PC 上用 VMware 安装 Ubuntu 24.04。
2.1 VMware 安装 Ubuntu
-
下载 VMware Workstation Pro
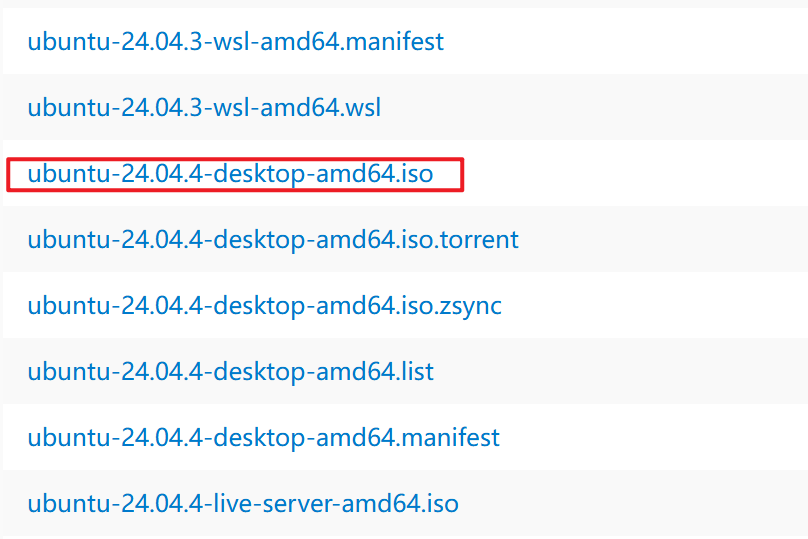
-
下载 Ubuntu 24.04 镜像
-
新建虚拟机 → 选择 Ubuntu 镜像
-
配置虚拟网络:
退出VMware,右键选择 以管理员身份运行 。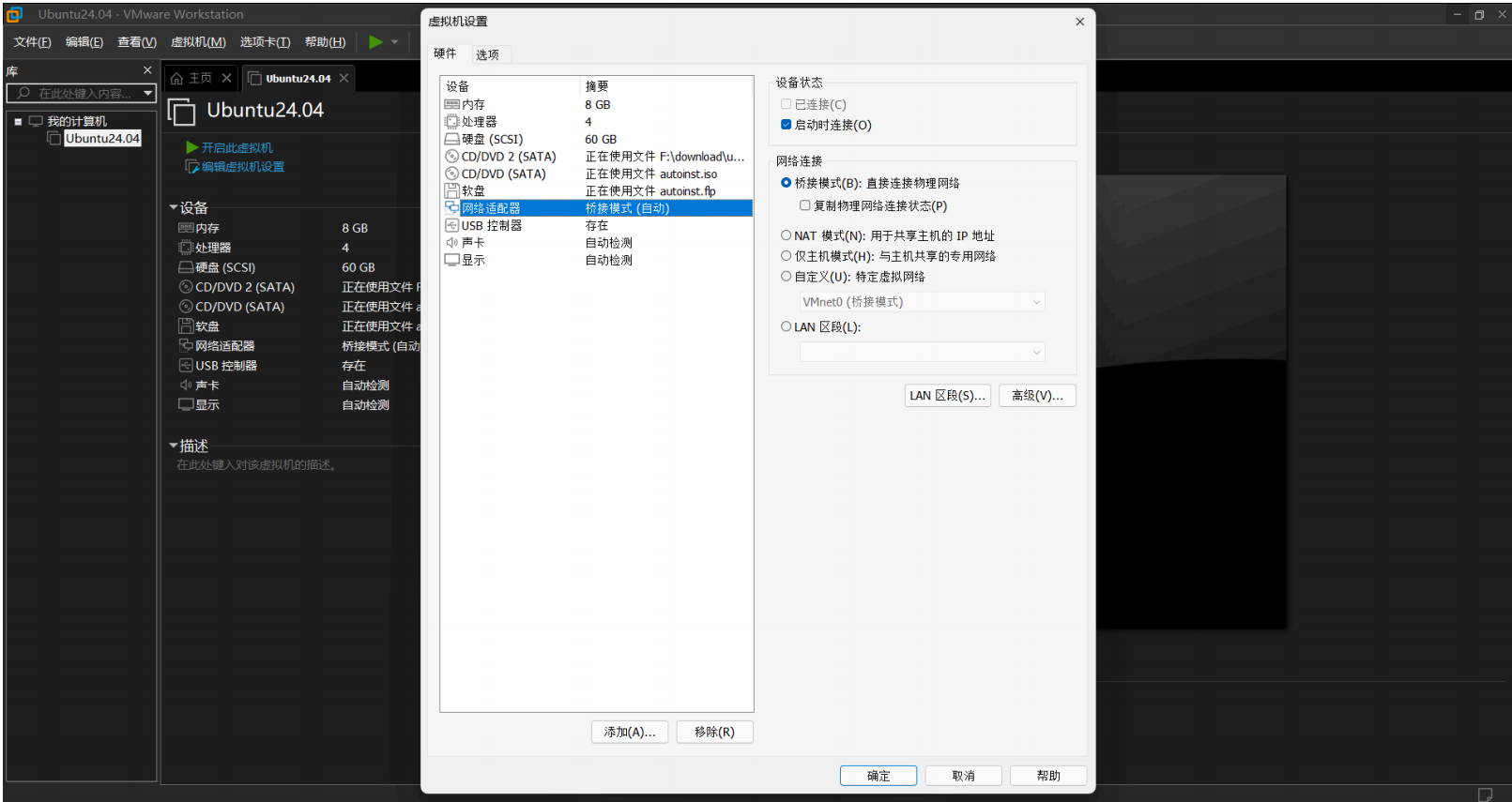
点击新建的 Ubuntu24.04 虚拟机 -> 编辑虚拟机设置 -> 网络适配器 -> 将网络连接设置为 桥接模式 -> 确定。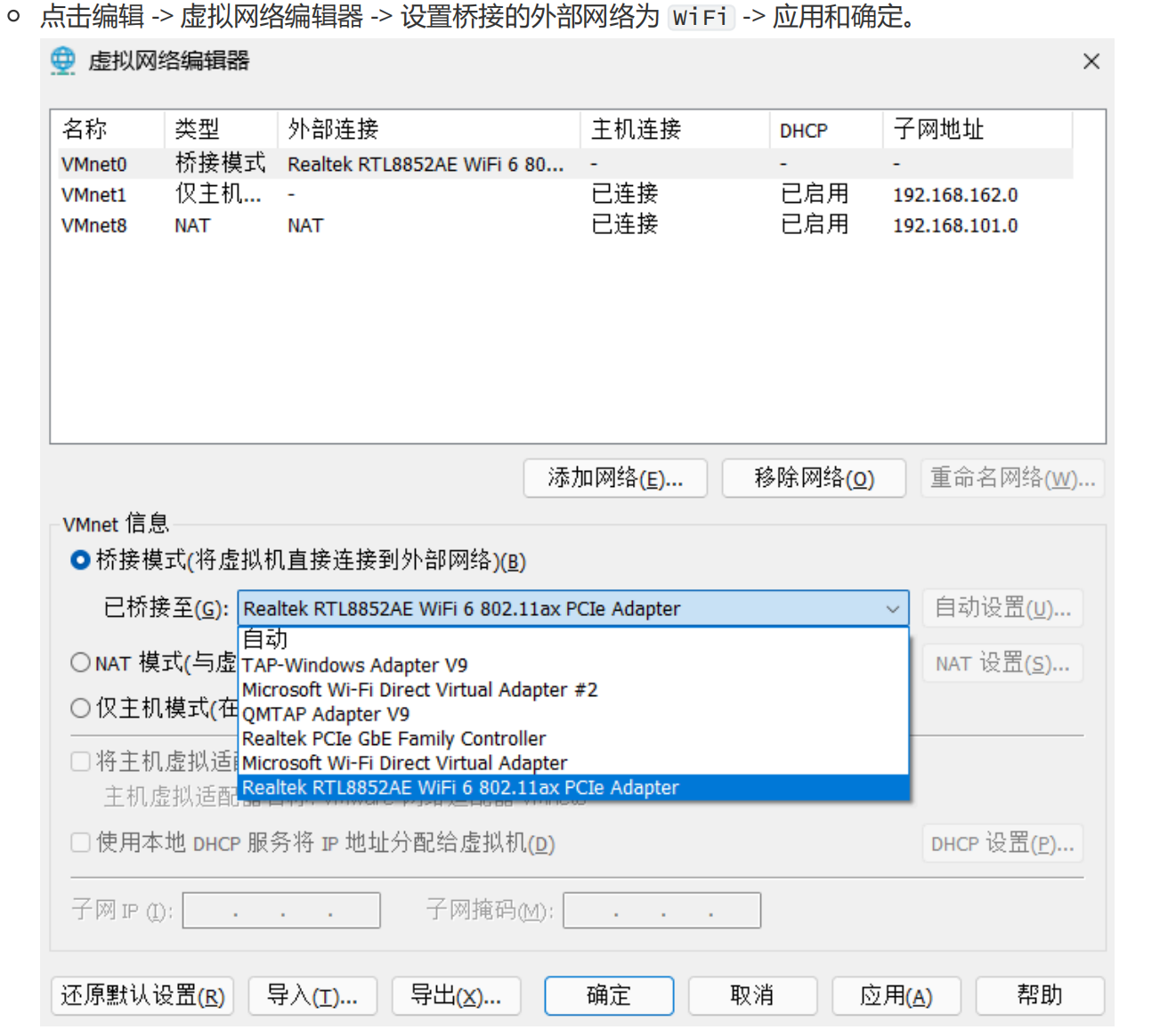
-
设置用户名密码 → 分配 CPU/内存
-
完成安装 → 安装 VMWare Tools:
sudo apt-get install open-vm-tools sudo apt-get install open-vm-tools-desktop
2.2 安装 ROS2 Jazzy
wget http://fishros.com/install -O fishros && . fishros# 鱼香ROS开源的一键安装工具
# 输入密码后选择 [5]一键配置:系统源 。
# 接着选择 [2]:更换系统源并清理第三方源 。
完成后选择 [2]:不添加ROS/ROS2源 。
更新软件包:
输入以下命令:sudo apt update && sudo apt upgrade -y
安装并配置 VSCode 工具:参考 Linux基础课程 2.1.4 安装 VScode 。
2.3 VSCode 远程开发
PC 端安装 VSCode → Remote-SSH 插件,连接 ssh ubuntu@<树莓派IP>。
第 3 章:ROS2 基础
本章目标: 理解 ROS2 的四个核心概念,学会创建工作空间和包。
先问一个问题:为什么需要上位机和下位机两层?树莓派不能直接控制电机吗?
树莓派跑 Linux,Linux 不是实时系统。你让它"每 1ms 算一次 PID",它可能 3ms 后才响应——因为 Linux 在忙着处理网络或显示。
但电机控制必须实时。角度环要 2ms 算一次,慢了车就抖甚至失控。
所以分工是这样的:
STM32(下位机):实时控制 P I D、读编码器、读陀螺仪 —— 每 1ms 都不能断
树莓派(上位机):算里程计、跑 SLAM、跑导航 —— 偶尔卡一下没问题一句话:STM32 保证车不倒,树莓派保证车走到。
3.1 核心概念
| 概念 | 本质 | 类比 | 本项目实例 |
|---|---|---|---|
| Node(节点) | 一个独立运行的程序 | 一个独立的人 | car_node、key_control_node |
| Topic(话题) | 数据通道 | 微信群 | /odom、/scan、/cmd_vel |
| Publisher(发布者) | 往 Topic 里写数据 | 往群里发消息 | car_node 发布 /odom |
| Subscriber(订阅者) | 从 Topic 里读数据 | 收群消息 | Navigation2 订阅 /cmd_vel |
发布者和订阅者不需要知道对方的存在——这就是解耦。
为什么 ROS2 这么设计?
假设你的车有 10 个传感器:激光雷达、摄像头、GPS、IMU……
每个传感器驱动是一个程序,控制算法是另一个程序,显示又是另一个。
如果每个程序都要"知道对方在哪才能通信",代码会变成一团乱麻。ROS2 的做法: 谁发了数据往 Topic 上一扔,谁想用自己订阅。
发布者不关心有几个订阅者,订阅者不关心数据从哪来的。
这就是"解耦"——每个模块独立开发、独立调试、独立崩溃。
3.2 关键命令
ros2 run <pkg> <node> # 运行一个节点
ros2 launch <pkg> <launch_file> # 同时启动多个节点
ros2 topic list # 查看有哪些 Topic
ros2 topic echo <topic> # 查看数据
ros2 topic pub <topic> <type> <data> # 手动发布
ros2 node list # 查看节点列表
ros2 node info <node> # 查看节点详情
colcon build # 编译工作空间
source install/setup.bash # 让系统找到新包
3.3 消息类型
- Twist(速度指令)→
linear.x(线速度),angular.z(角速度) - Odometry(里程计)→
pose(位置+朝向),twist(速度) - LaserScan(激光雷达)→
ranges[](距离数组),angle_min/max - TransformStamped(TF)→
frame_id(父坐标系),child_frame_id
3.4 创建 ROS2 工作空间
mkdir -p ~/ros2_ws/src
cd ros2_ws/src
sudo apt install python3-colcon-common-extensions
ros2 pkg create test_pkg --build-type ament_python --dependencies rclpy
test_node.py:
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
class TestNode(Node):
def __init__(self, name):
super().__init__(name)
self.get_logger().info("Hello, ROS2!")
def main(args=None):
rclpy.init(args=args)
node = TestNode("test_node")
rclpy.spin(node) # 阻塞,直到 Ctrl+C
rclpy.shutdown()
setup.py 配置入口点:
entry_points={
'console_scripts': [
"test_node = test_pkg.test_node:main"
],
}
编译运行:
cd ~/ros2_ws
colcon build
source install/setup.bash
ros2 run test_pkg test_node
3.5 发布者与订阅者
发布者:
self.pub = self.create_publisher(String, "publisher", 10)
self.timer = self.create_timer(0.5, self.timer_callback)
def timer_callback(self):
msg = String()
msg.data = "Hello, I am Pi"
self.pub.publish(msg)
订阅者:
self.sub = self.create_subscription(String, "publisher", self.sub_callback, 10)
def sub_callback(self, msg):
self.get_logger().info("Received: {}".format(msg.data))
第 4 章:激光雷达驱动
本章目标: 让 COIN-D6 激光雷达 在 ROS2 中跑起来,能在 rviz2 中看到点云。
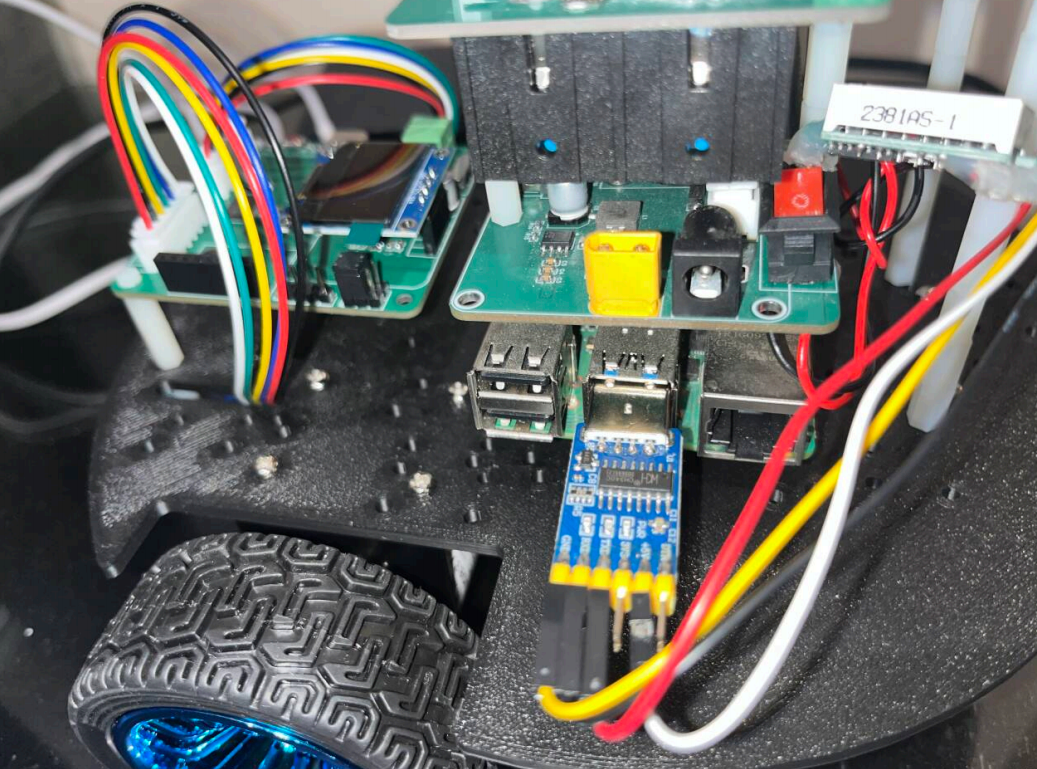
4.1 硬件连接
COIN-D6 激光雷达(TOF 测距,12m 范围,360°,230400bps)
│
├─ VCC → USB 转 TTL 的 5V
├─ GND → USB 转 TTL 的 GND
├─ RXD → USB 转 TTL 的 TXD
└─ TXD → USB 转 TTL 的 RXD
│
树莓派 USB 口
TOF(Time of Flight)测距原理: 激光发射出去、反射回来,测量飞行时间。
距离 = 光速 × 飞行时间 / 2
相比超声波:速度快、精度高、不受温度影响。
4.2 安装驱动
scp cspc_lidar_sdk_ros2_D4_20250731.tar.gz ubuntu@<ip>:~/
cd ~/
tar -xvf cspc_lidar_sdk_ros2_D4_20250731.tar.gz
cp -r cspc_lidar_sdk ~/ros2_ws/src/
cd ~/ros2_ws/ && colcon build
4.3 配置端口
编辑 params/cspc_lidar.yaml,将 port 改为:
port: /dev/laser_scan
4.4 启动并验证
source install/setup.bash
ros2 launch cspc_lidar lidar_launch.py
验证数据:
ros2 topic echo /scan
rviz2 可视化:
rviz2 → Add → By topic → /scan → OK
Fixed Frame: laser_link
看到周围环境的点云(墙、障碍物)即成功。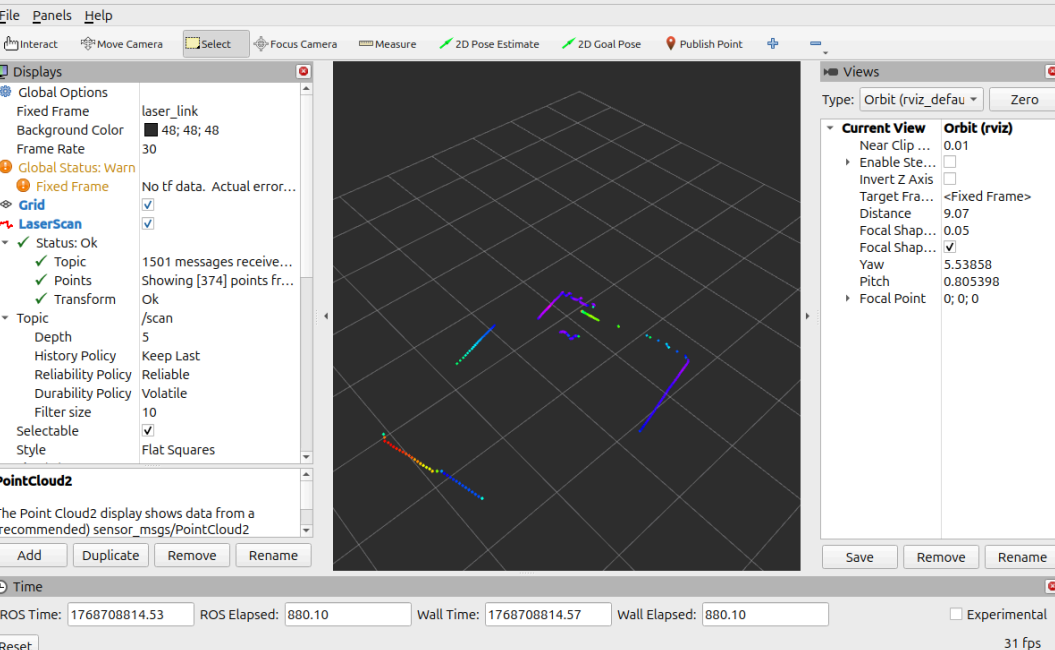
第 5 章:STM32 驱动传感器
本章目标: STM32F103 读取 MPU6050 陀螺仪和编码器数据,通过串口发送给树莓派。
里程计在ROS2中的作用
-
里程计是ROS2中用于估计机器人位置和姿态的重要传感器数据来源,通过集成轮式编码器和惯性测量单元(IMU)等传感器,提供机器人在二维平面上的相对运动信息。
-
通过轮式编码器测量轮子的转动情况,计算机器人在平面上的线速度和角速度,从而估计其位 置变化。
-
结合IMU(如MPU6050)提供的加速度和角速度数据,能够更准确地估计机器人的姿态变 化,尤其是在轮子打滑或不平坦地形上。
-
里程计数据通常发布包含机器人的位置、姿态以及线速度和角速度信息,供导航和定位模块使 用。
-
在ROS2导航栈中,里程计数据是实现自主导航、路径规划和避障的基础,有助于机器人构建 环境地图并实现精准定位。
安装STM32CubeIDE配置STM32
下载并安装: STM32CubeIDE
注意:选择安装1.19.0版本的。
## 5.1 硬件配置
| 外设 | 通信方式 | 引脚 | 用途 |
|---|---|---|---|
| MPU6050 | I2C2 | PB10(SCL), PB11(SDA) | 陀螺仪 Z 轴角速度 |
| 左编码器 | TIM3 编码器模式 | PA6(CH1), PA7(CH2) | 左轮速度 |
| 右编码器 | TIM1 编码器模式 | PA8(CH1), PA9(CH2) | 右轮速度 |
| USART2 | 串口 | PA2(TX), PA3(RX) | 与树莓派通信(115200) |
| TIM2 | PWM | — | 电机速度控制 |
5.2 创建项目
- 配置及汉化教程:STM32CubeIDE配置及汉化教程
- 新建工程并配置:
- 选择 文件 -> 新建 -> STM32 Project 。
- 选择芯片型号 STM32F103C8T6 ,点击下一步。
- 填写项目名称 ros2_car ,其他选项保持默认,点击完成。
- 打开 Pinout & Configuration 选项卡:
- 点击 RCC ,将 HSE 设置为 Cystal/Ceramic Resonator 。
- 点击 SYS ,将 DEBUG 设置为 Serial Wire 。
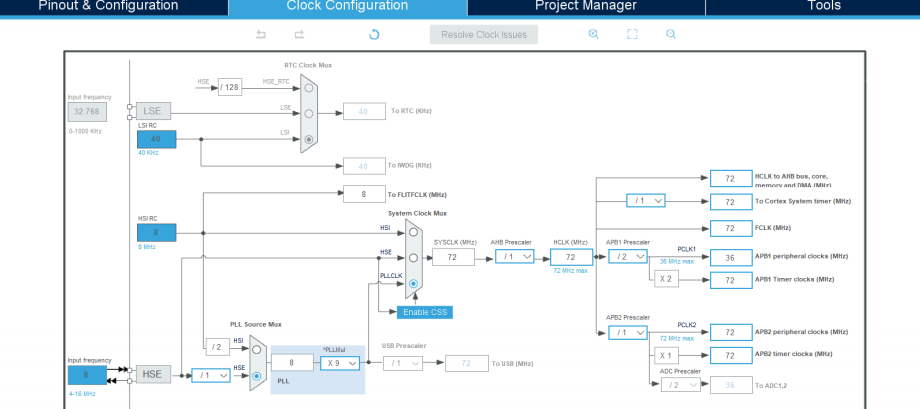
- 打开 Clock Configuration 选项卡:
- 选择 HSE 频率为 8MHz 。
- 将 SYSCLK 设置为 72MHz 。
导入外设驱动:
git clone https://github.com/CaddonThaw/stm32-hal-devices.git Devices
5.3 MPU6050 陀螺仪
关于 MPU6050: 内部有一个陀螺仪(测角速度)和一个加速度计(测加速度)。本项目只用 Z 轴角速度。
原始值 → rad/s 的换算:
float MPU6050_DMP_GetROSGyroz(void)
{
do {
result = dmp_read_fifo(gyro, accel, quat,
&sensor_timestamp, &sensors, &more);
} while (more); // 全部读完,拿到最新值
float gyrozDps = ((float)gyro[2]) / 16.4f;
return gyrozDps * MPU6050_DEG2RAD;
}
换算公式:
MPU6050 量程:±2000°/s
16 位 ADC 范围:-32768 ~ +32767
灵敏度系数:32768 ÷ 2000 ≈ 16.4
原始值 -500:
→ -500 ÷ 16.4 = -30.5 °/s
→ -30.5 × π/180 = -0.53 rad/s
知识点:DMP(Digital Motion Processor)——MPU6050 内部协处理器,专门处理姿态数据。
知识点:while(more)——DMP FIFO 可能堆积了多个数据包,全部读完才能拿到最新的。
5.4 编码器测速
编码器原理: 电机轴上有磁编码盘,旋转时霍尔传感器检测脉冲。TIM 编码器模式(TI12)同时检测 CH1 和 CH2 的上升沿+下降沿,4 倍频提高精度。
void Encoder_Read(float *left, float *right)
{
count_left = __HAL_TIM_GET_COUNTER(&htim3); // 左
count_right = __HAL_TIM_GET_COUNTER(&htim1); // 右
__HAL_TIM_SET_COUNTER(&htim3, 0);
__HAL_TIM_SET_COUNTER(&htim1, 0);
float distance_per_pulse = (0.65 * 3.14159) / 2000.0;
*left = (count_left * distance_per_pulse) / dt;
*right = (count_right * distance_per_pulse) / dt;
}
知识点:为什么读取后要归零? 不清零计数器会不断累积。每次清零后,下次读到的是"这一段时间内的新脉冲数"。
轮子转一圈的距离: π × 65mm ≈ 204mm,每圈 2000 脉冲,每个脉冲 ≈ 0.1mm。
5.5 printf 重定向
#include <stdio.h>
int fputc(int ch, FILE *f) {
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
注意: STM32 的 printf 不是打印到电脑屏幕,而是通过串口发给树莓派。
5.6 主循环
while (1) {
gyroz = MPU6050_DMP_GetROSGyroz();
Encoder_Read(&left_speed, &right_speed);
OLED_ShowSignedFloat(1, 7, gyroz, 4);
OLED_ShowSignedFloat(2, 7, left_speed, 4);
OLED_ShowSignedFloat(3, 7, -right_speed, 4);
printf("(%.2f,%.2f,%.2f)\r\n", gyroz, left_speed, -right_speed);
if (rx_flag == 1) { /* 解析树莓派指令 */ }
HAL_Delay(10);
}
OLED 显示:
gyroz: -0.12
left: 34.56 mm/s
right: 67.89 mm/s
第 6 章:串口通信 + 里程计
本章目标: 树莓派和 STM32 通过串口收发数据,树莓派计算里程计并发布。
6.1 串口协议
下行:树莓派 → STM32(控制指令):
(x=0.500000,z=0.000000)
↑线速度(m/s) ↑角速度(rad/s)
上行:STM32 → 树莓派(传感器数据):
(-0.12,34.56,78.90) ← gyroz, left, -right
6.2 STM32 串口接收状态机
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (ch == '(') { state = 1; rx_index = 0; }
else if (ch == ')') { state = 0; rx_flag = 1; }
else if (state == 1) { rx_data[rx_index++] = ch; }
HAL_UART_Receive_IT(&huart2, &rx_byte, 1); // 重新收下一个字节
}
核心知识点: HAL 的 HAL_UART_Receive_IT 是一次性的——收完一个字节就停。必须在回调中重新调用,否则串口永久沉默。
状态机图解:
等待 '(' → 收到 '(' → 开始收集 → 收到 ')' → 置标志 → 回到等待
state=0 state=1 存数据 rx_flag=1
6.3 数据安全
if (rx_flag == 1) {
char temp_rx_data[64];
strcpy(temp_rx_data, (char *)rx_data); // ① 先拷贝
rx_flag = 0; // ② 再清标志
target_speed = cmd_vel("x=", temp_rx_data);
target_angle = cmd_vel("z=", temp_rx_data);
}
为什么先拷贝再清标志: rx_data 是中断和主循环共享的变量。不先拷贝,解析到一半被中断改写就全乱了。
6.4 树莓派 car_node.py
线程架构:
- 主线程(ROS2 spin):处理订阅回调 + 每 100ms 发布里程计
- 子线程(car_loop,每 5ms):串口收发
为什么要独立线程: 串口 readline() 可能阻塞。放在主线程会卡住所有 ROS2 回调。
class CarNode(Node):
def __init__(self):
super().__init__('car_node')
self.odometry_pub = self.create_publisher(Odometry, '/odom', 10)
self.odometry_broadcaster = TransformBroadcaster(self)
self.create_timer(0.1, self.publish_odom)
self.key_control_sub = self.create_subscription(
Twist, '/key_control', cb, 10)
self.cmd_vel_sub = self.create_subscription(
Twist, 'cmd_vel', cb, 10)
self.serial_port = serial.Serial(
'/dev/stm32_dev', 115200, timeout=0.001)
self.car_thread = threading.Thread(target=self.car_loop)
self.car_thread.start()
6.5 car_loop(串口通信线程)
def car_loop(self):
while rclpy.ok():
# 发:速度指令
msg = '(x={:.6f},z={:.6f})\r\n'.format(
self.target_speed, self.target_angle)
self.serial_port.write(msg.encode('utf-8'))
# 收:传感器数据
if self.serial_port.in_waiting > 0:
raw = self.serial_port.readline().decode().strip()
if raw.startswith('(') and raw.endswith(')'):
g, l, r = raw[1:-1].split(',')
self.gyroz = -float(g) # 取反(方向修正)
self.left_speed = float(l)
self.right_speed = float(r)
time.sleep(0.005)
6.6 里程计计算(三个核心公式)
def publish_odom(self):
dt = 0.1
d = (self.left_speed + self.right_speed) / 2
# ★ 三个核心公式:
self.angle += self.gyroz * dt # 角度 = 角速度 × 时间
self.pos_x += d * math.cos(self.angle) # X = 速度 × cos(角度)
self.pos_y += d * math.sin(self.angle) # Y = 速度 × sin(角度)
# 发布 /odom
odom.pose.pose.position.x = self.pos_x / 66.6
odom.pose.pose.position.y = self.pos_y / 66.6
self.odometry_pub.publish(odom)
# 发布 TF
self.odometry_broadcaster.sendTransform(transform)
66.6 是什么: 实验标定值。让小车走 1 米,看 pos_x 累积了多少,反推出从毫米到米的换算系数。不同小车这个值不同(轮胎充气程度都影响)。
为什么里程计会有累积误差?(我的理解)
里程计不是"测"位置,是"推算"位置。
当前的位置 = 之前的位置 + 这次走的位移
每次推算都有小误差(轮子打滑 1mm、陀螺仪漂移 0.1°),
走了 1 米误差 1cm 没关系,走了 100 米误差可能到 1 米了。
这就是为什么里程计短距离准,长距离漂。后面 Cartographer 和 AMCL 的作用就是修正这个累积误差。
6.7 坐标系系统
odom(起点,里程计原点)
↓ TF(每 100ms 更新)
base_footprint(地面投影,z=0)
↓ URDF(静态)
base_link(车体中心)
↓ URDF(静态)
laser_link(激光雷达,x=0.057, z=0.0745)
- odom:起点 (0,0),随时间累积的里程计位置
- base_footprint:小车在地面的投影,导航算法用这个
- base_link:小车物理中心,PID 控制用
- laser_link:激光雷达位置,/scan 数据就是这个坐标系下的
第 7 章:TB6612 + PID 控制
本章目标: 写 TB6612 电机驱动 和 PID 控制,让小车能按指令运动。
7.1 TB6612 电机驱动
| AIN1 | AIN2 | 电机状态 |
|---|---|---|
| 1 | 0 | 正转 |
| 0 | 1 | 反转 |
| 1 | 1 | 刹车 |
| 0 | 0 | 滑行 |
PWM 决定速度,0 = 停,7200 = 全速。
// 正数 = 正转,负数 = 反转,绝对值 = PWM
TB6612_Motor(1500, 1500); // 两轮正转
TB6612_Motor(-800, 1200); // 左反转,右正转(左转)
7.2 P 控制器(角度环)
float p_calc(float kp, float target, float current) {
return kp * (target - current); // 误差 × 比例系数
}
// 每 2ms:kp = -1500
angle_out = p_calc(-1500.0, target_angle, gyroz);
物理含义: 小车偏了 → 误差产生 → angle_out 纠正 → 回正。
kp = -1500: 负号是因为陀螺仪和差速正方向相反,属于硬件适配。
7.3 PI 控制器(速度环)
float pi_calc(float kp, float ki, float *err_sum, float ki_max,
float target, float current) {
float err = target - current;
*err_sum += err; // 积分累积
if (*err_sum > ki_max) *err_sum = ki_max; // 限幅
if (*err_sum < -ki_max) *err_sum = -ki_max;
return kp * err + ki * *err_sum;
}
// 每 10ms:kp=1000, ki=200
left_out = pi_calc(1000.0, 200.0, &left_err_sum, 10000.0, target_speed, avg);
P 和 I 的分工(面试常考):
- P(比例):马上响应——慢了就加大,快了就减小。问题:存在稳态误差。
- I(积分):慢慢累积——持续存在的微小误差通过积分最终弥补。问题:积分饱和(车轮卡住时误差不断累积,放开后过冲)。
PID 像一个洗澡调水温的过程(我的理解):
你要水温 40°C。先开热水——水冷了再开大点,热了关小点。这就是 P。
但发现水总是 38°C,差 2°C 到不了 40°C。你慢慢把热水阀再拧大一点点,保持住。这就是 I。
这时候有人用冷水,水温骤降,你一下把热水开到最大。这就是 D(虽然本项目没用 D)。P 解决"现在差多少",I 解决"一直差一点"的问题。
积分限幅(ki_max = 10000)的作用:防积分饱和。
7.4 差速合成
// 左轮 = 总速度 + 角度修正
// 右轮 = 总速度 - 角度修正
TB6612_Motor(left_speed_out + angle_out,
right_speed_out - angle_out);
差速原理:
- 直走:angle_out=0 → 左 = 右 = speed_out
- 左转:angle_out<0 → 左 < 右
- 右转:angle_out>0 → 左 > 右
7.5 控制周期
TIM4 配置: Prescaler=720-1, Period=100-1 → 1ms 中断
72MHz / 720 = 100kHz → 100kHz / 100 = 1kHz = 1ms
| 控制环 | 周期 | 频率 | 说明 |
|---|---|---|---|
| 角度环(P) | 2ms | 500Hz | 角度变化快,需频繁纠正 |
| 速度环(PI) | 10ms | 100Hz | 速度受惯性影响,慢一点也可 |
| 电机输出 | 2ms | 500Hz | — |
7.6 键盘控制节点
class KeyboardControl(Node):
def __init__(self):
self.publisher = self.create_publisher(Twist, '/key_control', 10)
def run(self):
tty.setraw(sys.stdin.fileno()) # 按键立即触发
while rclpy.ok():
key = self.get_key()
msg = Twist()
if key == 'w': msg.linear.x = 0.5
if key == 's': msg.linear.x = -0.5
if key == 'a': msg.angular.z = 1.0
if key == 'd': msg.angular.z = -1.0
self.publisher.publish(msg)
知识点: tty.setraw() 把终端改成原始模式——按键不经过输入缓冲,按下立即触发。退出时要用 termios.tcsetattr 恢复终端设置,否则没法正常打字。
7.7 限幅保护
# 键盘控制(人操作)
self.key_control_sub = self.create_subscription(Twist, '/key_control', cb, 10)
# 导航控制(自动)
self.cmd_vel_sub = self.create_subscription(Twist, 'cmd_vel', cb, 10)
# 限幅:
if target_speed > 0.5: target_speed = 0.5 # 最快 0.5 m/s
elif target_speed > 0 and target_speed < 0.2:
target_speed = 0.2 # 电机死区补偿
为什么限最低速: 电机有死区——PWM 太小电机不转。0.2m/s 以下是"给了信号但不动"的区域。
第 8 章:URDF 模型
本章目标: 用 URDF 描述小车,在 rviz2 中显示三维模型。
8.1 car.urdf
<robot name="car">
<link name="base_footprint"/>
<joint name="base_footprint_to_base_link" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0 0 0.043"/>
</joint>
<link name="base_link">
<visual>
<geometry><cylinder length="0.02" radius="0.092"/></geometry>
<material name="blue"/>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<parent link="base_link"/>
<child link="laser_link"/>
<origin xyz="0.057 0 0.0745"/>
</joint>
</robot>
坐标系链路:
base_footprint(地面投影,z=0)
↓ fixed, z=0.043
base_link(车体中心,蓝色圆盘,r=9.2cm)
├─ left_wheel(左轮,continuous 旋转关节)
├─ right_wheel(右轮,continuous 旋转关节)
├─ caster_wheel(万向轮,fixed)
└─ laser_link(激光雷达,x=0.057, z=0.0745)
知识点:
type="fixed":关节固定不动type="continuous":关节持续旋转(轮子)<visual>:定义外观,纯 rviz2 显示用
8.2 robot_state_publisher
ros2 run robot_state_publisher robot_state_publisher car.urdf
读取 URDF → 自动发布所有静态 TF(base_footprint → base_link → laser_link 的固定偏移)。
8.3 完整的 TF 变换链
- car_node.py 发布:odom → base_footprint(动态,每 100ms 更新)
- URDF 发布:base_footprint → base_link → laser_link(静态)
- Cartographer 发布:map → odom(动态,修正里程计漂移)
为什么需要 TF 树? 激光雷达扫描到墙上的点 P,这个点是在 laser_link 坐标系下测量的。通过 TF 树换算到 map 坐标系,才能画到地图上。
8.4 成果
cd ~/ros2_ws && colcon build
source install/setup.bash
ros2 launch car_pkg car_display.launch.py
rviz2
rviz2 中出现小车的 3D 模型(蓝色底盘、黑色轮子、激光雷达支架)。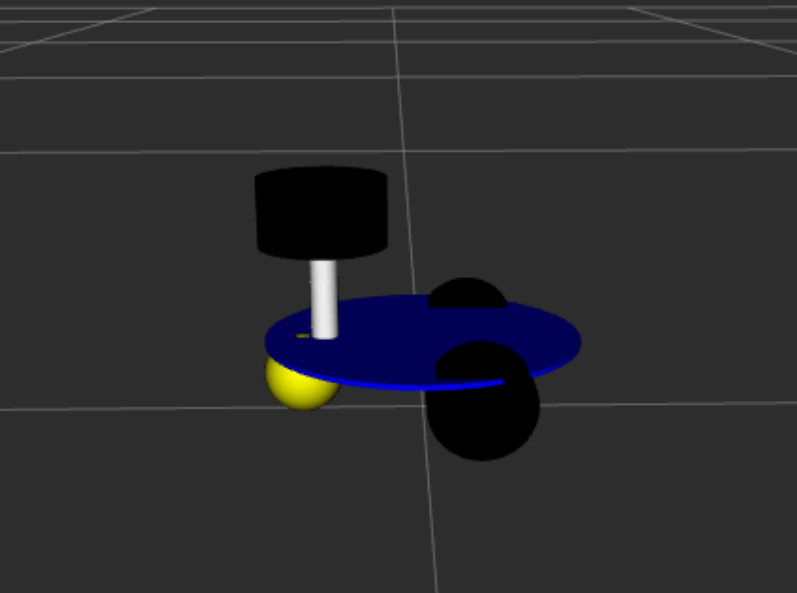
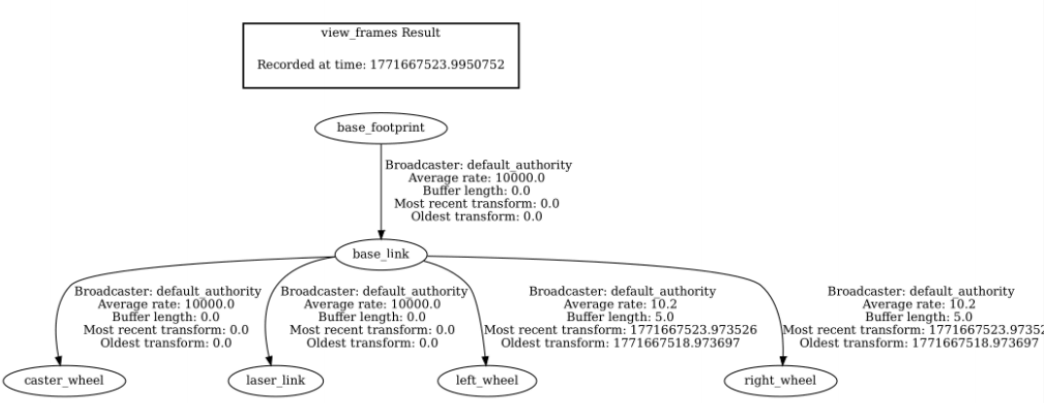
查看 tf关系 :
ros2 run tf2_tools view_frames
第 9 章:Cartographer SLAM 建图
本章目标: 用 Cartographer 建图,小车一边走一边画房间地图。
9.1 配置文件(backpack_2d.lua)
options = {
map_frame = "map",
tracking_frame = "base_link",
published_frame = "odom",
use_odometry = true,
num_laser_scans = 1,
}
TRAJECTORY_BUILDER_2D.min_range = 0.10 -- 忽略 10cm 以内(车体自身)
TRAJECTORY_BUILDER_2D.max_range = 10 -- 忽略 10m 以外
TRAJECTORY_BUILDER_2D.use_imu_data = false
9.2 启动建图
ros2 launch car_pkg car_mapping.launch.py
启动的节点:
- car_display.launch.py → URDF → 静态 TF
- cspc_lidar → /scan(激光雷达数据)
- car_node.py → /odom + TF(里程计)
- cartographer_node → 接收 /scan + /odom → 建图
- key_control_node → 键盘控制
- rviz2 → 可视化
9.3 SLAM 工作流程
/scan(激光雷达)+ /odom(里程计)+ TF 树
→ Cartographer:子图匹配 → 闭环检测
→ /map(栅格地图)
→ map → odom(修正里程计漂移)
操作: 键盘遥控小车在房间里走一圈
效果: rviz2 中逐渐画出地图——黑 = 障碍物,白 = 可通行,灰 = 未知
地图颜色是怎么来的?(我的理解)
Cartographer 把空间划分成一个一个的栅格(grid cell),每个格子 5cm × 5cm。
激光打到一个格子,说明那里有障碍物→标记黑色。
激光穿过一个格子,说明那里是空的→标记白色。
激光没打过的格子→灰色(未知)。多次扫描同一区域:如果同一个格子 10 次中有 8 次打到墙,那它大概率真是墙。
这就是概率栅格地图——不是"是墙 / 不是墙"的二值判断,而是"有多大概率是墙"。
9.4 保存地图
ros2 run nav2_map_server map_saver_cli -f ~/map1
生成两个文件:
-
map1.yaml:地图描述文件(分辨率、原点坐标)
-
map1.pgm:图像格式的地图
map1.yaml
image: map1.pgm
resolution: 0.050 # 每个像素代表 5cm
origin: [-1.0, -1.8, 0] # 地图左下角位置
第 10 章:Navigation2 自主导航
本章目标: 加载建好的地图,让小车自动规划路径并导航到目标点。
10.1 三大核心模块
① AMCL(定位)——粒子滤波
- 输入:/scan(激光雷达)、/odom(里程计)、/map(地图)
- 输出:map → odom 变换(修正里程计累积误差)
- 原理:撒 2000 个猜测粒子 → 激光匹配 → 淘汰不匹配的 → 收敛
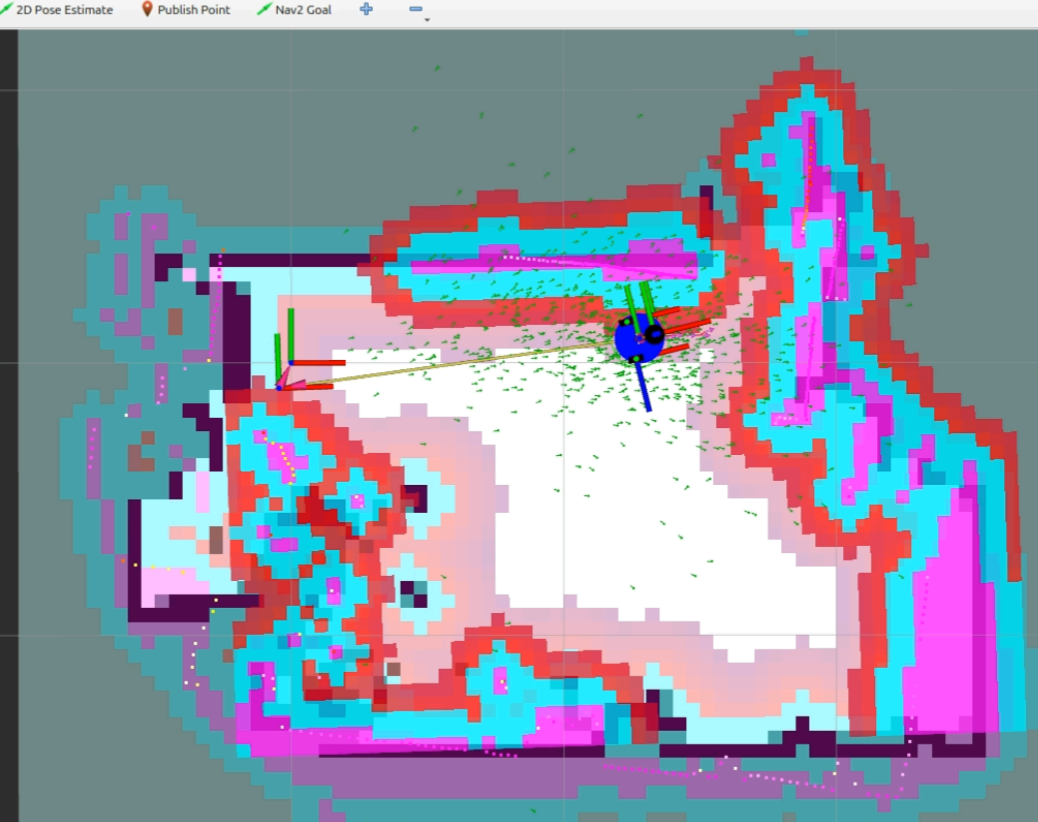
rviz2 中可以看到:刚开始箭头散在整个地图上,几秒后聚拢到小车实际位置。
② 全局规划器(Planner)—— A* 算法
- 输入:全局代价地图 + 起点 + 终点
- 输出:一条从起点到终点的路径(rviz2 中的红线)
③ 局部规划器(Controller)—— DWB / MPPI
- 输入:全局路径 + 实时 /scan(激光数据)
- 输出:cmd_vel(每 50ms 更新一次速度指令)
- 遇到障碍物:临时绕开;绕不过就请求全局重规划
为什么分全局和局部两个规划器?(我的理解)
全局规划器像导航地图——它知道从北京到上海怎么走,但它不知道当前路口有没有施工。
局部规划器像司机看路——它知道大概方向,但具体怎么绕过前边的坑、避让旁边的车,它自己判断。全局规划反应慢(算一次要几百毫秒),但考虑的是整条路。
局部规划反应快(每 50ms 算一次),但只看眼前几米。如果只用一个规划器:
要么反应慢(撞上障碍物才重算,来不及)
要么只看得近(算不出从 A 到 B 的长远路径)
10.2 启动命令
ros2 launch car_pkg car_nav.launch.py
10.3 关键配置参数(nav2_params.yaml)
amcl:
robot_model_type: "nav2_amcl::DifferentialMotionModel" # 差速模型
base_frame_id: "base_footprint"
global_frame_id: "map"
controller_server:
vx_max: 0.5 # 最大线速度
wz_max: 1.9 # 最大角速度
local_costmap:
rolling_window: true # 窗口跟着车移动
width: 3 / height: 3 # 只看周围 3 米
robot_radius: 0.096 # 小车半径
inflation_radius: 0.20 # 障碍物外扩
global_costmap:
robot_radius: 0.096
inflation_radius: 0.70 # 外扩更大(更保守)
10.4 导航完整流程
- 加载地图 → AMCL 定位(粒子收敛)
- 用户设目标(rviz2 中 Nav2 Goal)
- 全局规划:A* 在地图上算路径 → 输出红线
- 局部规划 + 控制:DWB 沿红线走,每 50ms 输出 cmd_vel
→ car_node.py → STM32 → 电机 - 反馈:编码器+陀螺仪 → 里程计 → AMCL 更新定位
- 到达 → 停止
第 11 章:完整数据链路
11.1 控制链路(键盘 → 轮子)
键盘按 W
→ key_control_node 发布 /key_control
→ car_node.py: target_speed = 0.5
→ car_loop(5ms): '(x=0.5,z=0.0)'
→ USB 串口
→ STM32 状态机解析
→ TIM4 中断 PID(1ms)
角度环(2ms): −1500 × (0 − gyroz)
速度环(10ms): 1000 × err + 200 × ∫err
差速合成: TB6612_Motor(speed+angle, speed-angle)
→ TB6612 → 电机 → 轮子转
11.2 感知链路(轮子 → 里程计)
左编码器 → TIM3 → count
右编码器 → TIM1 → count
MPU6050 → gyroz
→ printf("(gyroz,left,right)")
→ USB 串口
→ car_loop: split → self.gyroz/left/right
→ publish_odom(100ms):
d=(left+right)/2
angle+=gyroz*dt
pos_x+=d*cos(angle)
pos_y+=d*sin(angle)
→ 发布 /odom + TF: odom→base_footprint
11.3 建图链路
/scan + /odom + TF
→ Cartographer:子图匹配 → 闭环检测
→ /map(栅格地图)
→ map→odom(修正里程计漂移)
11.4 导航链路
map_server 加载地图
→ AMCL 粒子滤波定位
→ 用户设目标点
→ 全局规划 A* 算路径
→ 局部规划 DWB 输出 cmd_vel
→ STM32 → 电机
→ 编码器反馈 → 里程计更新
→ AMCL 更新定位
→ 循环直到到达
第 12 章:调试笔记
PID 参数不匹配
现象: 小车抖动或响应慢
调整: 先调 P 到刚好不震荡,再加 I 消除稳态误差
- P 太大 → 震荡(电机疯狂开关)
- P 太小 → 响应慢(推一下才动)
- I 太大 → 过冲(停不下来)
- I 太小 → 稳态误差(永远差一点)
串口乱码
排查: 两边波特率是否一致(115200)?GND 是否共地?
激光雷达不转
排查: ls /dev/laser_scan 是否存在 → dmesg 查看 USB 识别 → 检查 udev 规则
TF 树不完整
ros2 run tf2_tools view_frames
查看生成的 frames.pdf 中是否所有坐标系都连上了。常见缺失:map → odom(Cartographer 没启动)。
rviz2 不显示模型
- 检查
car.urdf路径是否正确 - 检查
robot_state_publisher是否运行
附录:参数速查
PID 参数
| 环 | 类型 | kp | ki | ki_max | 频率 |
|---|---|---|---|---|---|
| 角度环 | P | -1500 | — | — | 500Hz |
| 左速度环 | PI | 1000 | 200 | 10000 | 100Hz |
| 右速度环 | PI | 1000 | 200 | 10000 | 100Hz |
定时器
| 定时器 | 模式 | Prescaler | Period | 频率 | 用途 |
|---|---|---|---|---|---|
| TIM1 | 编码器 | 0 | 65535 | — | 右编码器 |
| TIM3 | 编码器 | 0 | 65535 | — | 左编码器 |
| TIM2 | PWM | 0 | 7200-1 | — | 电机 PWM |
| TIM4 | 定时器 | 720-1 | 100-1 | 1kHz | PID 控制 |
串口
| 参数 | 值 |
|---|---|
| 波特率 | 115200 |
| 数据位 | 8 |
| 停止位 | 1 |
| 校验 | 无 |
| USART2 | PA2(TX), PA3(RX) |
| 接收方式 | 单字节中断 |
单位换算
| 传感器 | 原始数据 | 换算过程 | 最终单位 |
|---|---|---|---|
| MPU6050 | 16 位整数 | ÷16.4 → °/s, ×π/180 | rad/s |
| 编码器 | 脉冲计数 | ×(π×0.65/2000)÷dt | mm/s |
| 位置 | pos_x | ÷66.6 | 米 |
控制周期总结
STM32 主循环: 10ms (传感器读取 + 串口发送)
TIM4 中断: 1ms (PID + 电机输出)
├─ 角度环: 2ms (500Hz)
├─ 速度环: 10ms (100Hz)
└─ 电机输出: 2ms (500Hz)
树莓派 car_loop: 5ms (串口收发)
树莓派 odom: 100ms (里程计发布)

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐

 1
1 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)