ESP32安装软件arduino然后安装CHC343搭建环境连接屏幕蜂鸣器舵机按钮支持python通信
软件+完整代码+所有资料链接:https://pan.quark.cn/s/788ba52d5281
我的项目的最终的目标是这样的:
电脑上python识别数字,发送到ESP32-屏幕显示-按下按钮-蜂鸣器响-舵机旋转
1.安装CHC343
在这里下载 https://www.wch.cn/downloads/ch343ser_exe.html
2.安装软件arduino
https://www.arduino.cc/en/software/
安装上CHC343后接入esp32的com端,在windows电脑上端口显示多了一个(COM3)
意思就是端口3就是这个esp32,如果没有或者显示问号,等下再管,先安装arduino软件。
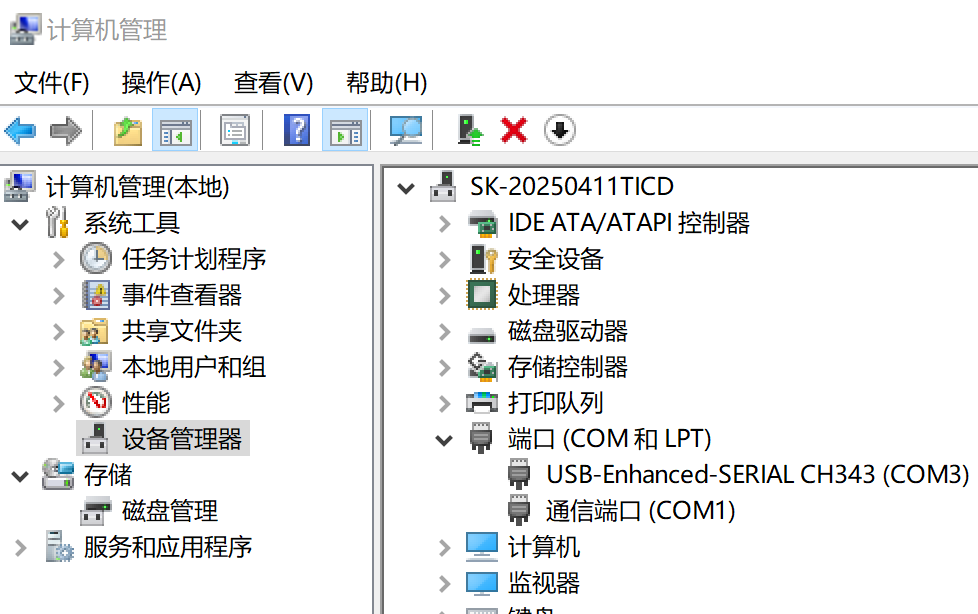
之前插上没反应,换了一根有数据传输功能的数据线可以了
如果识别不出来就换数据线
安装软件
arduino-ide_2.3.8_Windows_64bit
打开 Arduino IDE,点击左上角的 File -> Preferences(首选项)。
在 Additional Boards Manager URLs(附加开发板管理器地址)这一行,粘贴这个链接:
https://espressif.github.io/arduino-esp32/package_esp32_index.json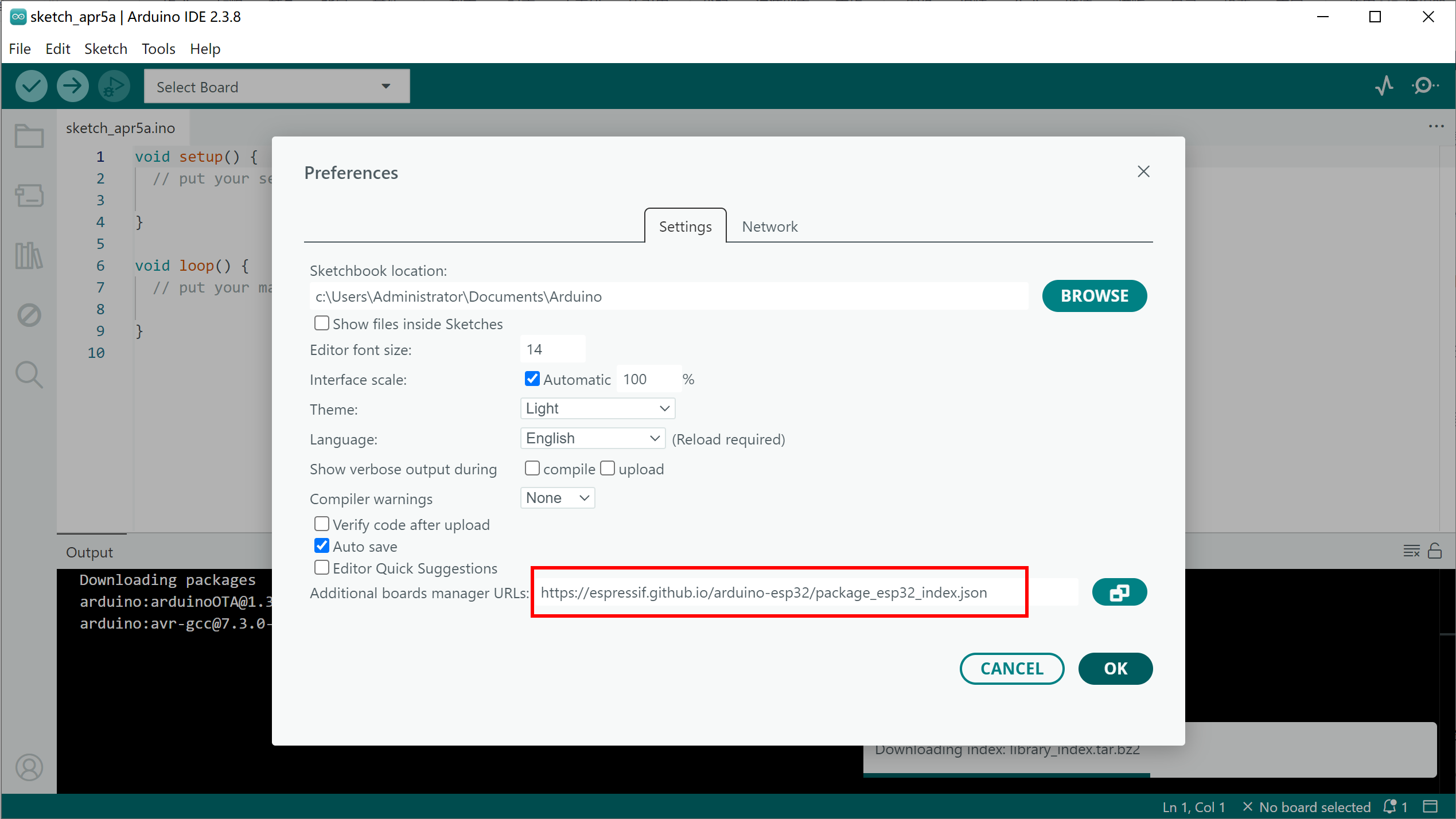
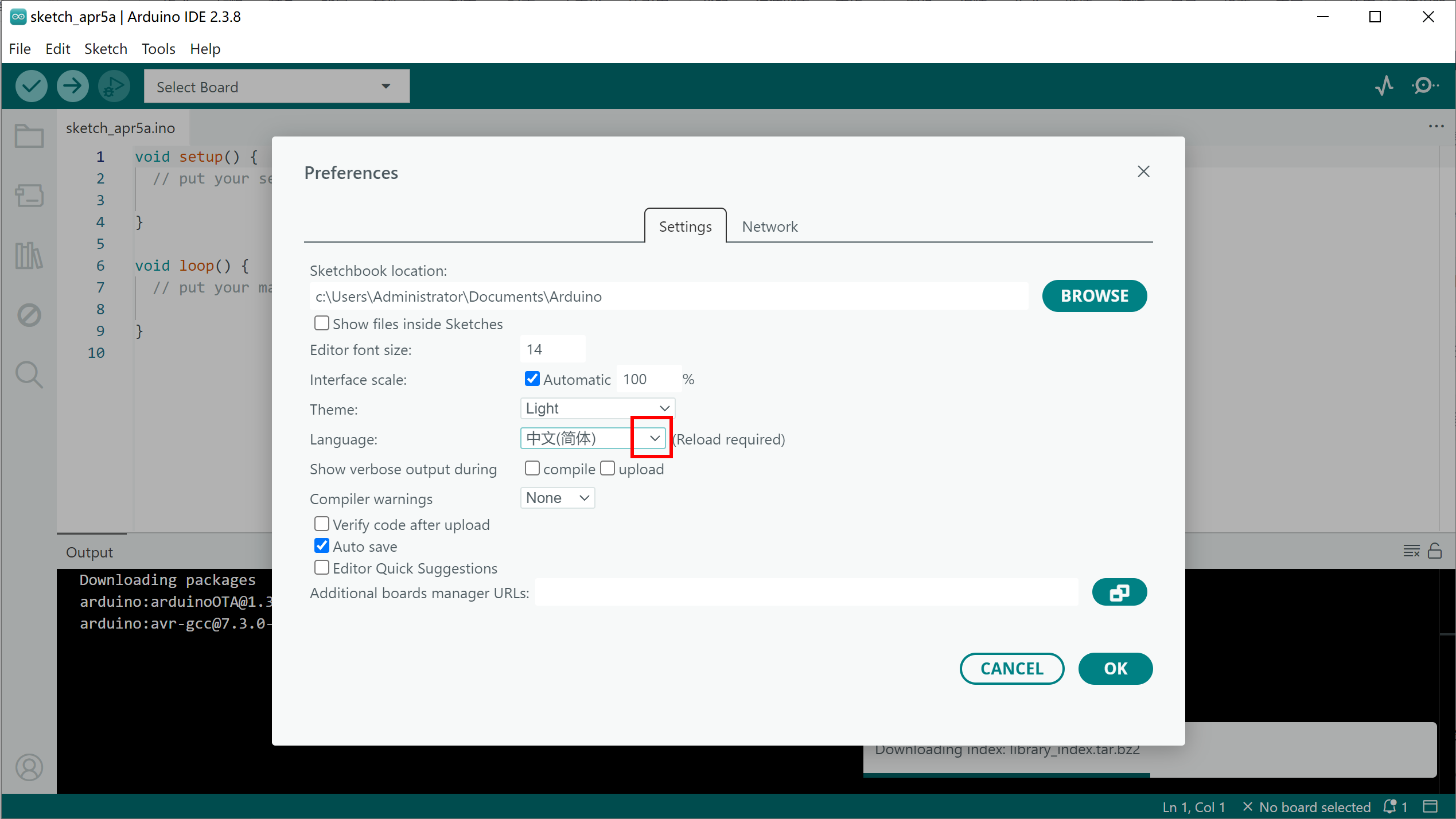
在这里汉化一下方便使用
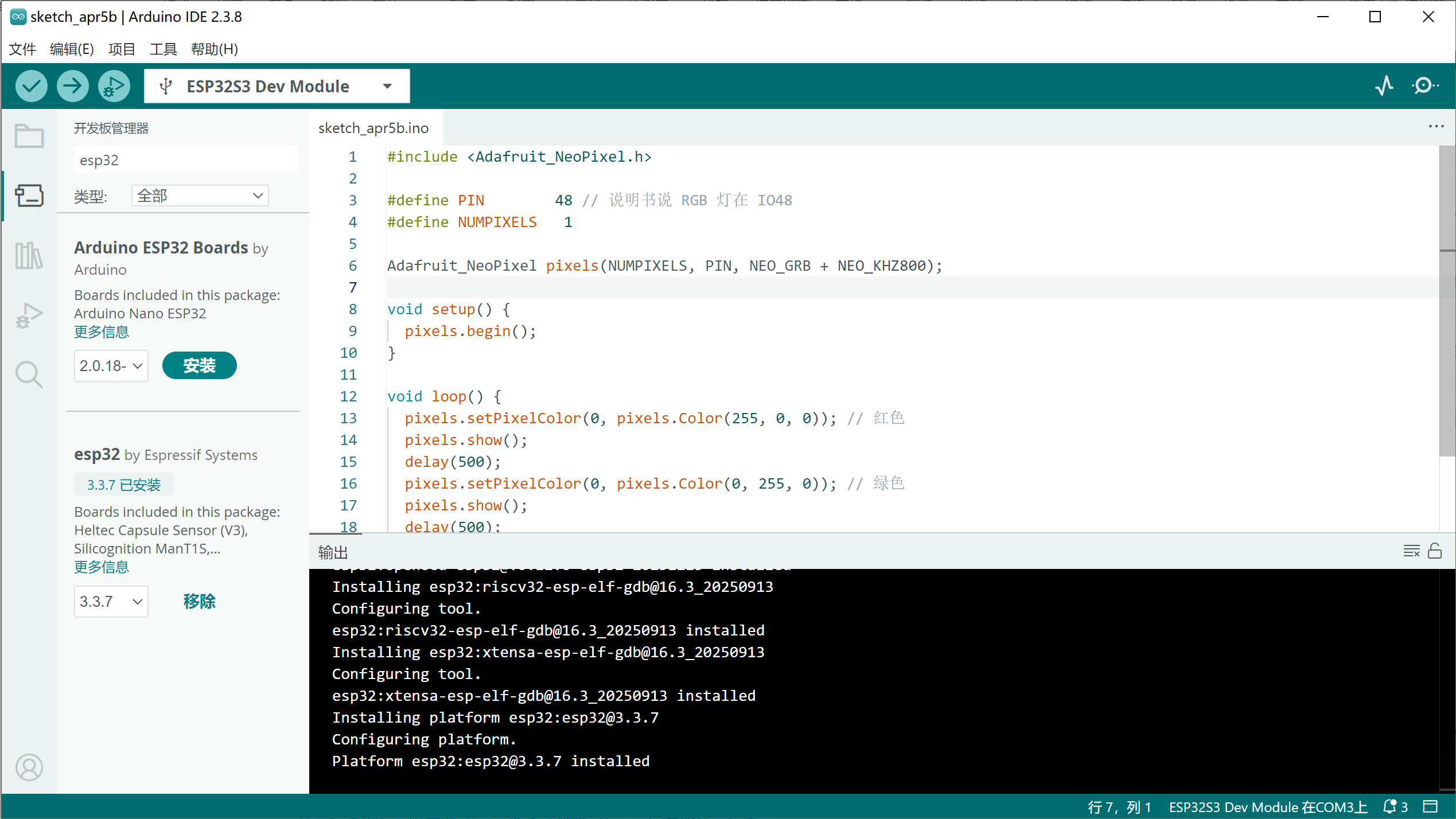
安装插件,点击左侧的这个""小接口""的形状的标志,在搜索框搜索
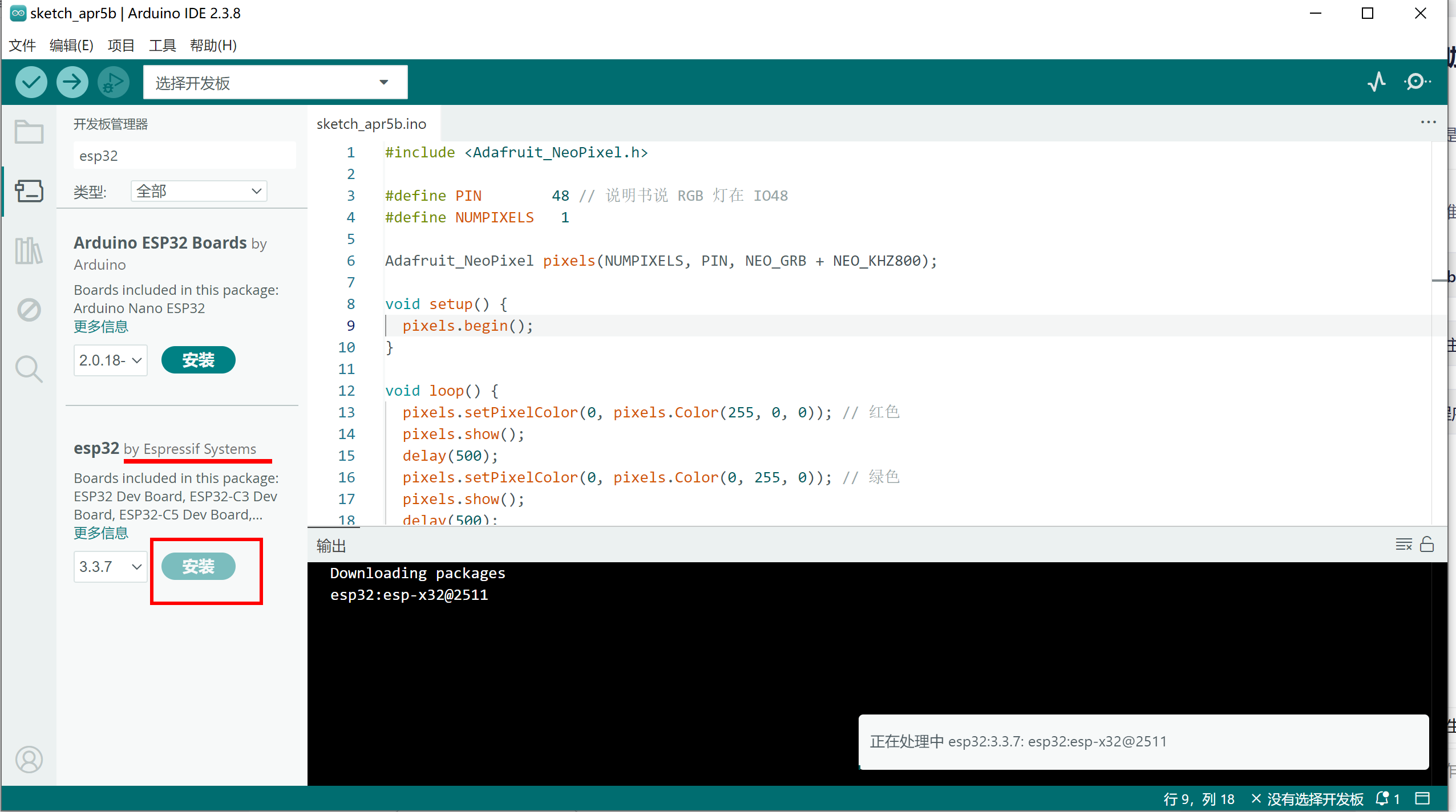
安装ESP32插件
安装过程有点缓慢,安装上后,
https://arduino.me/packages/esp32.json
把那个json文件换成这个,是从国内下载有点慢,然后我切换到了最开始的json
还是很慢,设置一下代理,在首选项里面,找到网络
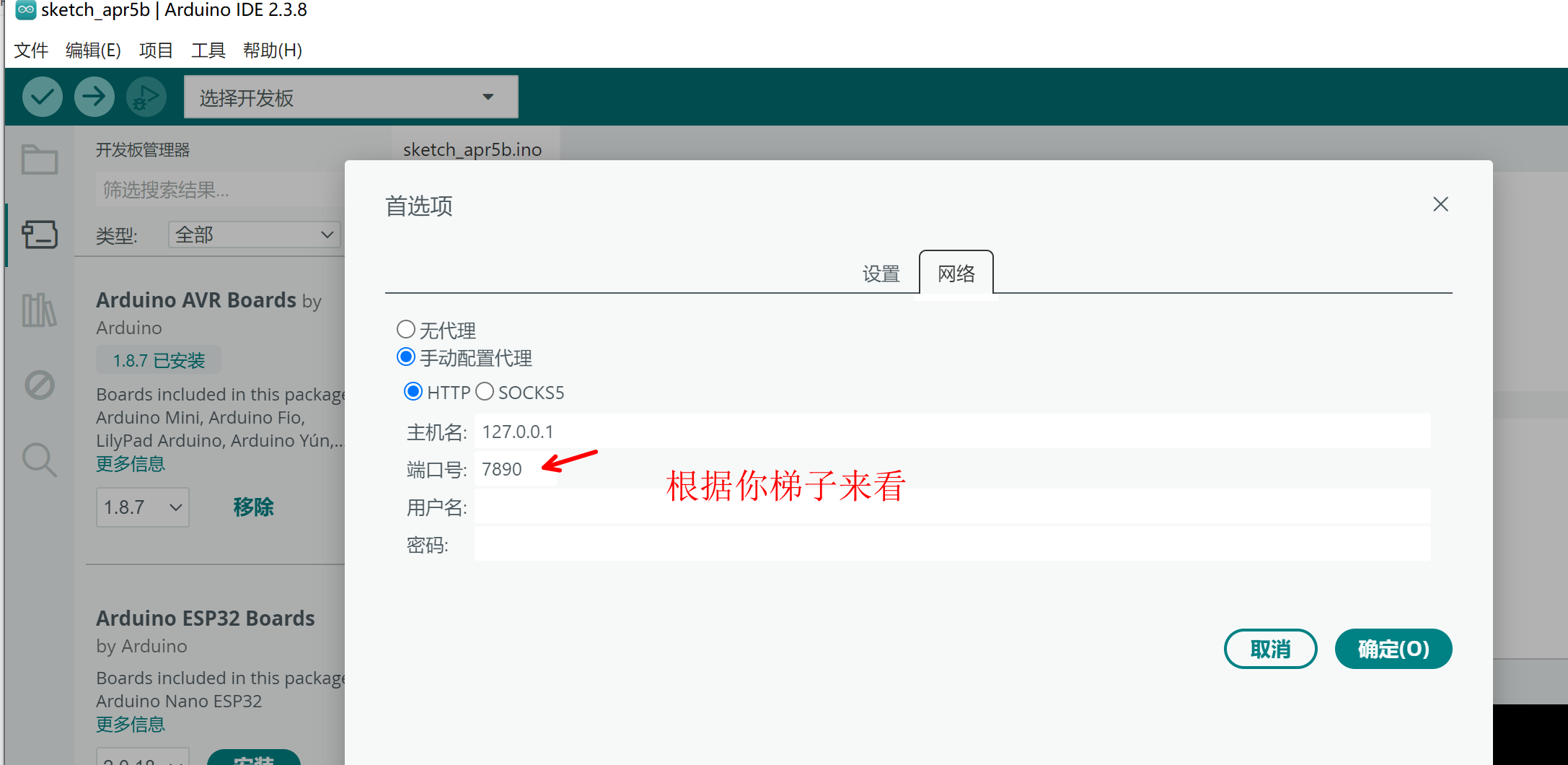
大概200MB还得是梯子快一些,我的梯子端口是这个,你根据你自己的梯子端口设置,好像改不动不知道是不是小bug,我把梯子端口改成7890就可以了
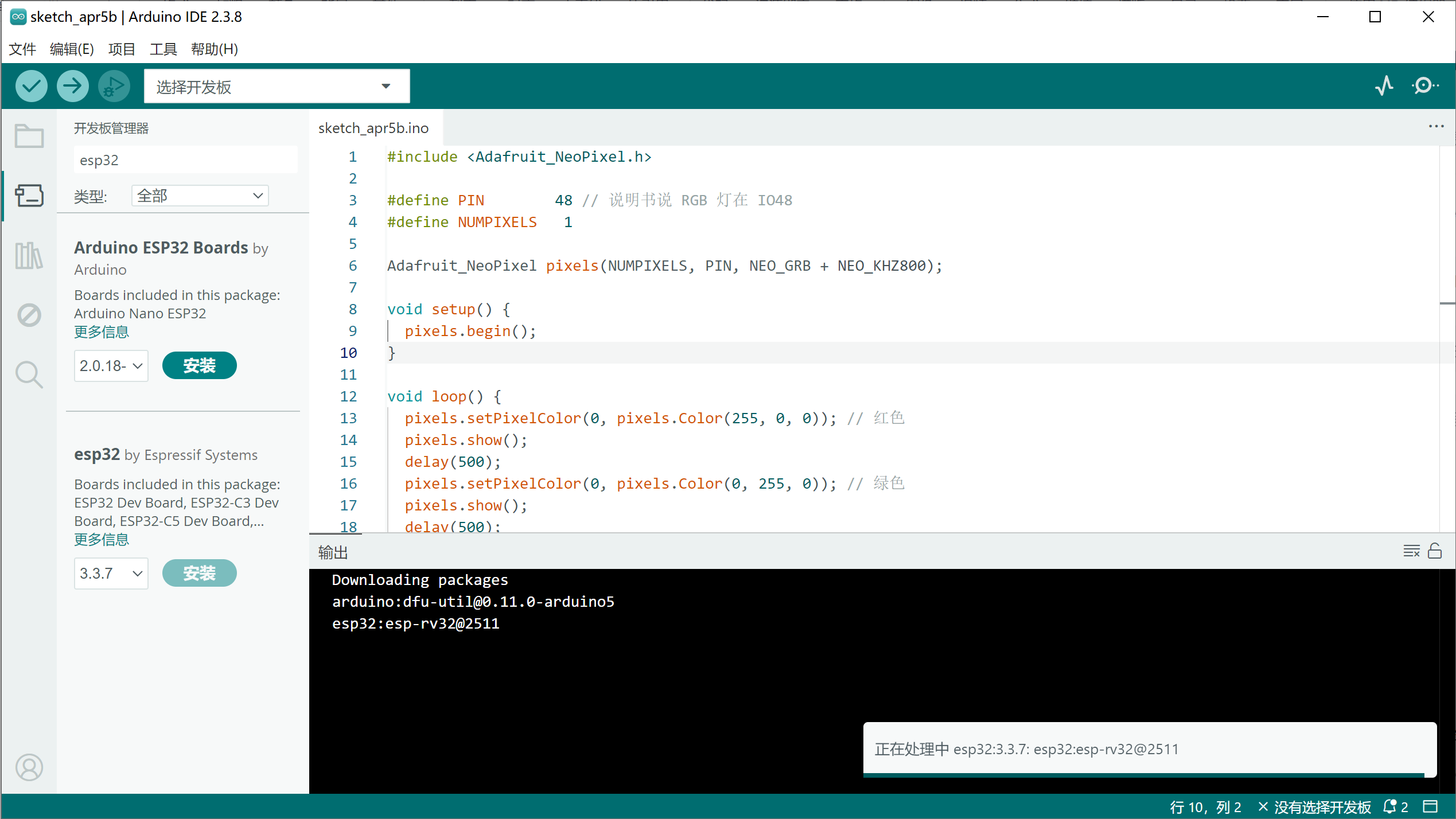
终于安装上了这个插件
下面测试一下,先用一个小灯的程序试试

根据你自己的板子型号设置
然后确认已经连接上了板子

都设置上后就连接上了板子了
右下角显示ESP32在COM3上表示连接成功
先用一个测试代码测试是否正确
在arduino里面粘贴这段代码,然后点击 →按钮烧录代码
#include <Adafruit_NeoPixel.h>
// 根据说明书,RGB 灯连接在引脚 48
#define PIN 48
#define NUMPIXELS 1
// 初始化灯珠对象
Adafruit_NeoPixel pixels(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
void setup() {
Serial.begin(115200);
Serial.println("RGB 测试开始...");
pixels.begin(); // 初始化灯珠
}
void loop() {
// 红色
Serial.println("显示:红色");
pixels.setPixelColor(0, pixels.Color(255, 0, 0));
pixels.show();
delay(1000);
// 绿色
Serial.println("显示:绿色");
pixels.setPixelColor(0, pixels.Color(0, 255, 0));
pixels.show();
delay(1000);
// 蓝色
Serial.println("显示:蓝色");
pixels.setPixelColor(0, pixels.Color(0, 0, 255));
pixels.show();
delay(1000);
// 关闭灯(呼吸效果)
Serial.println("关闭灯光");
pixels.setPixelColor(0, pixels.Color(0, 0, 0));
pixels.show();
delay(1000);
}下一步
删除本身的代码,把这个代码拷贝到这个里面,然后点左上角的➡ 按钮烧录代码
现在我要给它接一个屏幕,先用杜邦线别焊死,错了会很麻烦
-
屏幕不亮:检查 VCC 和 GND 是不是接反了(接反必烧,请三思后通电)。
-
显示乱码或黑屏:确认 SCL 和 SDA 没接反。

先用杜邦线接上试试
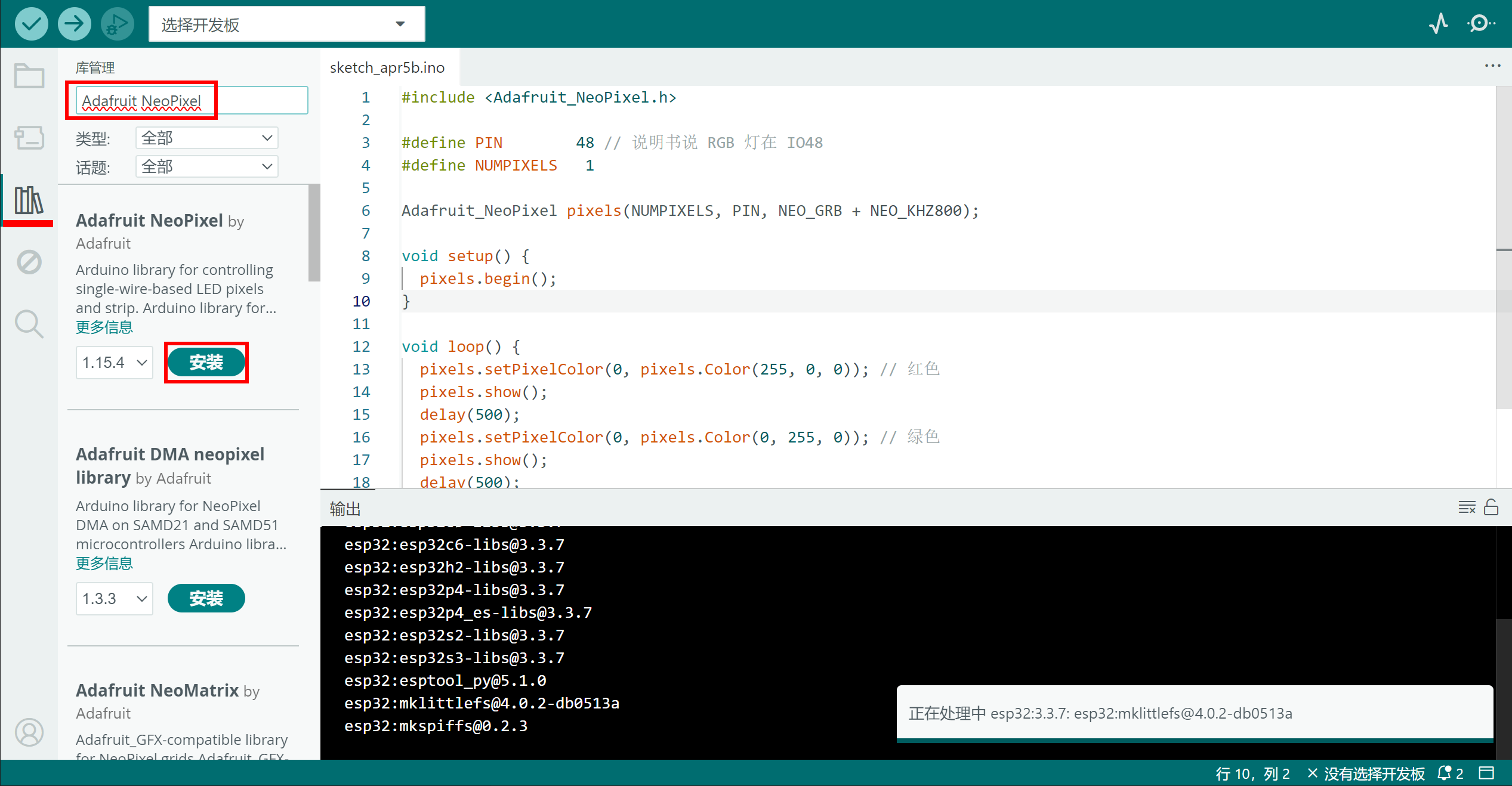
3. 安装屏幕驱动库
在 Arduino IDE 里:
点击左侧 “库管理器”(书架图标)。
搜索 U8g2。
找到 u8g2 by oliver,点击 “安装”。这是目前公认最好用、支持字体最全的屏幕库。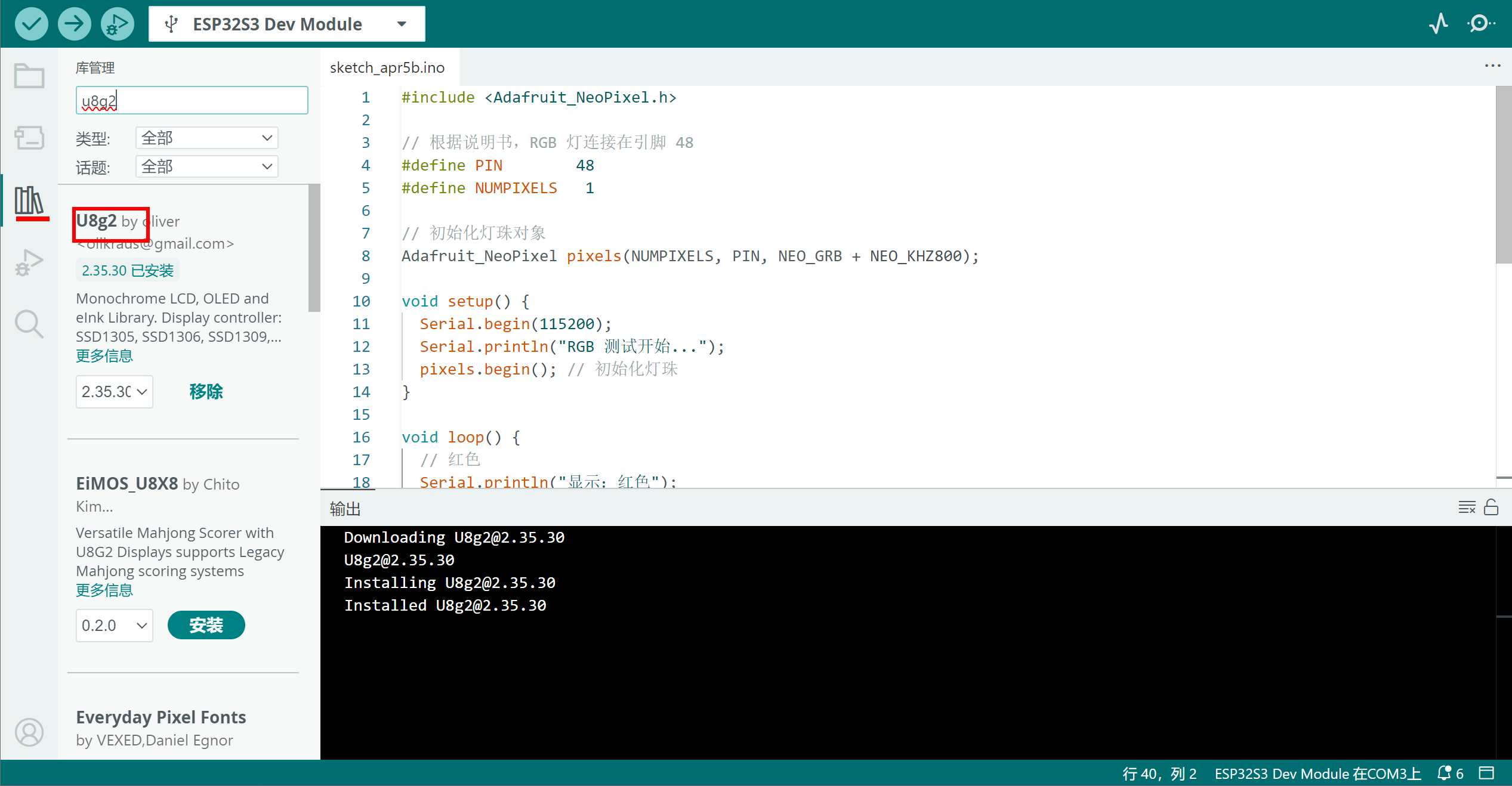
安装上了,接上屏幕后测试这个代码
#include <Arduino.h>
#include <U8g2lib.h>
#include <Wire.h>
// 初始化屏幕:SSD1306, 128x64分辨率, 使用硬件I2C
// SCL接9,SDA接8
U8G2_SSD1306_128X64_NONAME_F_HW_I2C u8g2(U8G2_R0, /* reset=*/ U8X8_PIN_NONE, /* clock=*/ 9, /* data=*/ 8);
void setup() {
u8g2.begin();
u8g2.enableUTF8Print(); // 支持中文字符(需对应字体)
}
void loop() {
u8g2.clearBuffer(); // 清除内部缓冲区
u8g2.setFont(u8g2_font_ncenB08_tr); // 选择一个字体
u8g2.drawStr(0,10,"ESP32-S3 Ready!"); // 写字
u8g2.drawStr(0,30,"Handwriting Demo");
u8g2.drawStr(0,50,"Waiting for PC...");
u8g2.sendBuffer(); // 将缓冲区内容发送到显示器
delay(1000);
}-
屏幕不亮:检查 VCC 和 GND 是不是接反了(接反必烧,请三思后通电)。
-
显示乱码或黑屏:确认 SCL 和 SDA 没接反。
遇到的问题:屏幕正常显示,打开串口监视器,发送8消息,什么都不显示,现在
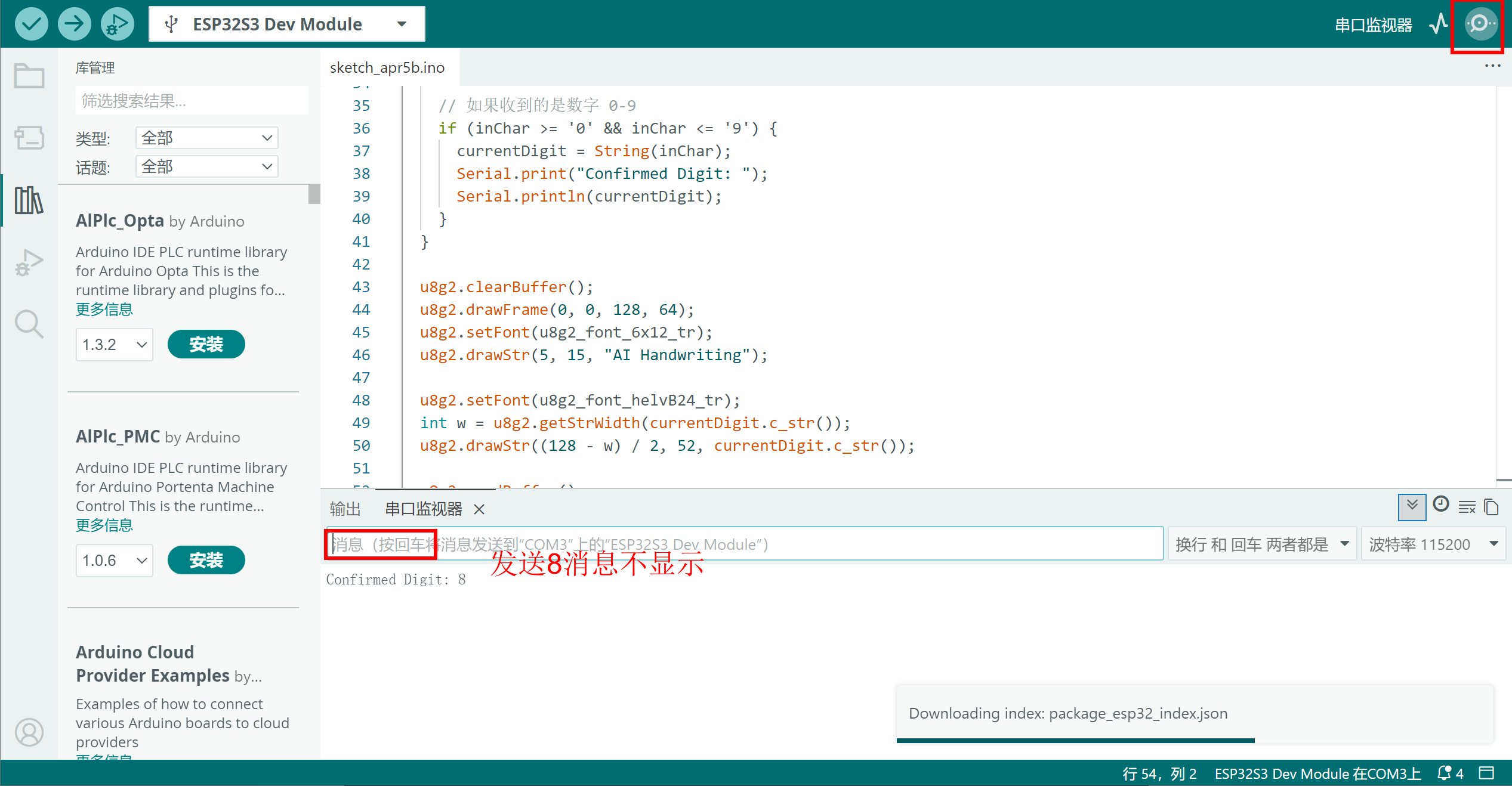
现在重新弄了一下,使用这个代码,SCL(42) SDA接线换到了41
在 Arduino IDE 菜单栏 工具 (Tools) 中:
-
USB CDC On Boot: 务必改为 Disabled(禁用)。
然后编译后按下RST
能够显示GO了,然后在串口监控器发送消息能收到了
#include <Arduino.h>
#include <U8g2lib.h>
// 保持 41, 42 接线不变
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, 42, 41, U8X8_PIN_NONE);
String currentDigit = "GO!";
void setup() {
// 强制初始化串口 0(硬件串口),并手动指定 S3 常用的 43/44 引脚
Serial.begin(115200);
u8g2.begin();
u8g2.enableUTF8Print();
u8g2.clearBuffer();
u8g2.setFont(u8g2_font_6x12_tr);
u8g2.drawStr(10, 35, "WAITING SERIAL...");
u8g2.sendBuffer();
// 此时你在监视器应该能看到这行字了
Serial.println("\n[SYSTEM OK]");
Serial.println("Protocol: UART Bridge");
}
void loop() {
// 使用最原始的字节检查
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
if (inChar == '\n' || inChar == '\r') {
// 收到换行符才处理(对应你串口监视器的设置)
continue;
}
// 如果收到的是数字 0-9
if (inChar >= '0' && inChar <= '9') {
currentDigit = String(inChar);
Serial.print("Confirmed Digit: ");
Serial.println(currentDigit);
}
}
u8g2.clearBuffer();
u8g2.drawFrame(0, 0, 128, 64);
u8g2.setFont(u8g2_font_6x12_tr);
u8g2.drawStr(5, 15, "AI Handwriting");
u8g2.setFont(u8g2_font_helvB24_tr);
int w = u8g2.getStrWidth(currentDigit.c_str());
u8g2.drawStr((128 - w) / 2, 52, currentDigit.c_str());
u8g2.sendBuffer();
delay(50);
}然后修改我的手写数字识别的代码
能够成功了,这个代码名字叫
手写数字识别CNN增强版
import tkinter as tk
from PIL import Image, ImageDraw, ImageOps
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision.transforms as transforms
import serial # 导入串口库
import time
# --- 1. 必须保留和训练时一致的模型类 ---
class UltimateCNN(nn.Module):
def __init__(self):
super(UltimateCNN, self).__init__()
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, padding=1)
self.bn1 = nn.BatchNorm2d(32)
self.conv2 = nn.Conv2d(32, 32, kernel_size=3, padding=1)
self.bn2 = nn.BatchNorm2d(32)
self.conv3 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
self.bn3 = nn.BatchNorm2d(64)
self.pool = nn.MaxPool2d(2, 2)
self.dropout = nn.Dropout(0.3)
self.fc1 = nn.Linear(64 * 7 * 7, 256)
self.fc2 = nn.Linear(256, 10)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = self.pool(F.relu(self.bn2(self.conv2(x))))
x = self.dropout(x)
x = self.pool(F.relu(self.bn3(self.conv3(x))))
x = self.dropout(x)
x = x.view(-1, 64 * 7 * 7)
x = F.relu(self.fc1(x))
x = self.dropout(x)
x = self.fc2(x)
return x
# 加载模型
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = UltimateCNN().to(device)
try:
model.load_state_dict(torch.load("mnist_model.pth", map_location=device))
model.eval()
except:
print("错误:未找到模型文件 mnist_model.pth")
class DigitApp:
def __init__(self, root):
self.root = root
self.root.title("AI 手写识别 - ESP32 同步版")
# --- 【核心修改】初始化串口 ---
# 请将 'COM3' 改为你设备管理器中看到的端口号
try:
self.ser = serial.Serial('COM3', 115200, timeout=1)
time.sleep(2) # 等待串口稳定
print("连接 ESP32 成功!")
except Exception as e:
self.ser = None
print(f"串口连接失败: {e}。请检查端口号并在代码中修改。")
self.canvas = tk.Canvas(root, width=280, height=280, bg="white", cursor="pencil")
self.canvas.pack(pady=10)
self.label = tk.Label(root, text="请在白色区域书写", font=("微软雅黑", 16))
self.label.pack()
self.image = Image.new("L", (280, 280), 255)
self.draw = ImageDraw.Draw(self.image)
self.canvas.bind("<B1-Motion>", self.paint)
btn_frame = tk.Frame(root)
btn_frame.pack(pady=10)
tk.Button(btn_frame, text="重置", command=self.clear, width=10).pack(side=tk.LEFT, padx=5)
tk.Button(btn_frame, text="AI识别", command=self.predict, width=12, bg="#FF6700", fg="white").pack(side=tk.LEFT, padx=5)
def paint(self, event):
r = 10 # 笔触稍微加粗,识别更准
x1, y1 = (event.x - r), (event.y - r)
x2, y2 = (event.x + r), (event.y + r)
self.canvas.create_oval(x1, y1, x2, y2, fill="black", outline="black")
self.draw.ellipse([x1, y1, x2, y2], fill=0)
def clear(self):
self.canvas.delete("all")
self.image = Image.new("L", (280, 280), 255)
self.draw = ImageDraw.Draw(self.image)
self.label.config(text="请在白色区域书写")
# 清除时给 ESP32 发送一个信号,显示问号或空白
if self.ser:
self.ser.write("?\n".encode())
def predict(self):
bbox = self.image.getbbox()
if bbox and (bbox[2] - bbox[0] > 5):
digit_crop = self.image.crop(bbox)
w, h = digit_crop.size
size = max(w, h) + 60
new_img = Image.new("L", (size, size), 255)
new_img.paste(digit_crop, ((size - w) // 2, (size - h) // 2))
img = new_img.resize((28, 28), resample=Image.LANCZOS)
else:
img = self.image.resize((28, 28), resample=Image.LANCZOS)
img = ImageOps.invert(img)
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])
img_tensor = transform(img).unsqueeze(0).to(device)
with torch.no_grad():
output = model(img_tensor)
prediction = torch.argmax(output, dim=1).item()
prob = F.softmax(output, dim=1)
conf = torch.max(prob).item() * 100
result_text = f"AI识别结果: {prediction} ({conf:.1f}%)"
self.label.config(text=result_text)
# --- 【核心修改】将结果通过串口发给 ESP32 ---
if self.ser:
# 发送字符串格式,例如 "5\n"
send_data = f"{prediction}\n"
self.ser.write(send_data.encode())
print(f"已传送到屏幕: {prediction}")
if __name__ == "__main__":
root = tk.Tk()
app = DigitApp(root)
# 窗口关闭时关闭串口
def on_closing():
if app.ser:
app.ser.close()
root.destroy()
root.protocol("WM_DELETE_WINDOW", on_closing)
root.mainloop()可以了,在手写识别出来数字后,可以发送到板子的屏幕上了。
经过多次调试
最终的目标是这样的,电脑上识别数字,发送到ESP32-屏幕显示-按下按钮-蜂鸣器响-舵机旋转
ESP32最终连线
最终接线
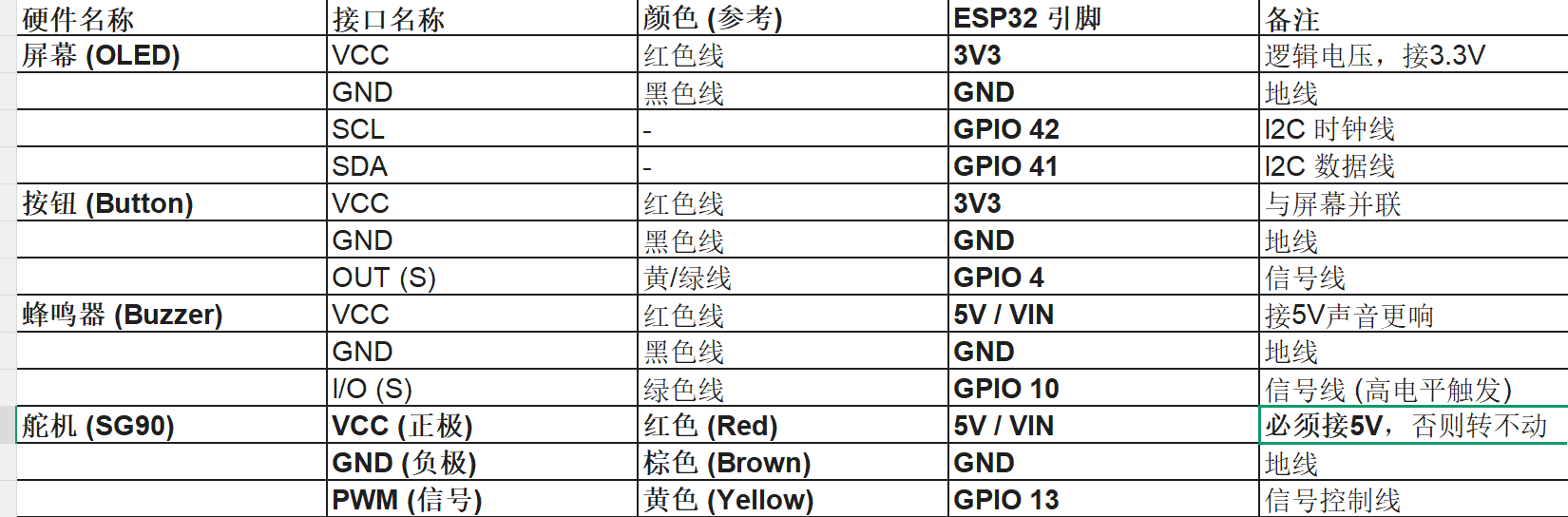
ESP32最终源码
#include <Arduino.h>
#include <U8g2lib.h>
#include <ESP32Servo.h>
// --- 1. 硬件引脚定义 ---
// 屏幕:SCL接42, SDA接41 (针对 ESP32-S3)
U8G2_SSD1306_128X64_NONAME_F_SW_I2C u8g2(U8G2_R0, 42, 41, U8X8_PIN_NONE);
#define BTN_PIN 4 // 按钮信号线
#define BUZ_PIN 10 // 蜂鸣器信号线 (高电平触发)
#define SRV_PIN 14 // 舵机信号线 (14号口)
// --- 2. 全局对象与变量 ---
Servo myServo;
String currentDigit = "GO!";
int digitInt = -1; // 存储当前识别到的整数数字 (-1 表示待机)
// --- 3. 辅助函数:执行归位并断开信号 ---
void servoHome() {
Serial.println("舵机正在归位到安全位置 (5度)...");
myServo.attach(SRV_PIN, 500, 2400); // 挂载信号
// 修改点:回到 5 度,避开物理限位死角,消除噪音
myServo.write(5);
delay(800); // 给足时间物理到位
myServo.detach(); // 彻底切断 PWM 信号,进入绝对静音
Serial.println("归位静默完成。");
}
void setup() {
// 【优先级最高】立刻关闭高电平触发的蜂鸣器,防止开机乱响
pinMode(BUZ_PIN, OUTPUT);
digitalWrite(BUZ_PIN, LOW);
// 初始化串口 (用于接收 Python 数据)
Serial.begin(115200);
// --- 初始化屏幕 ---
u8g2.begin();
u8g2.enableUTF8Print();
u8g2.clearBuffer();
u8g2.setFont(u8g2_font_6x12_tr);
u8g2.drawStr(10, 35, "INIT SYSTEM...");
u8g2.sendBuffer();
// --- 初始化按钮 ---
pinMode(BTN_PIN, INPUT_PULLUP);
// --- 初始化舵机资源并执行【开机安全回位】 ---
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
myServo.setPeriodHertz(50);
servoHome(); // 系统启动时自动归位到 5 度
u8g2.clearBuffer();
u8g2.drawStr(10, 35, "READY!");
u8g2.sendBuffer();
Serial.println("\n[SYSTEM OK - SAFE HOME 5 DEG]");
}
void loop() {
// --- 第一部分:读取电脑端识别结果 ---
while (Serial.available() > 0) {
char inChar = (char)Serial.read();
if (inChar == '\n' || inChar == '\r') continue;
if (inChar >= '0' && inChar <= '9') {
currentDigit = String(inChar);
digitInt = inChar - '0';
Serial.print("Confirmed Digit: ");
Serial.println(digitInt);
} else if (inChar == '?') {
currentDigit = "?";
digitInt = -1;
}
}
// --- 第二部分:按钮动作逻辑 ---
if (digitalRead(BTN_PIN) == LOW) {
if (digitInt != -1) {
Serial.println("Action Triggered!");
// 1. 蜂鸣器反馈 (数字是几响几声)
int beepTimes = (digitInt == 0) ? 1 : digitInt;
for (int i = 0; i < beepTimes; i++) {
digitalWrite(BUZ_PIN, HIGH);
delay(150);
digitalWrite(BUZ_PIN, LOW);
delay(150);
}
// 2. 舵机精准控制:【挂载 -> 旋转 -> 回到5度 -> 断开】
myServo.attach(SRV_PIN, 500, 2400);
int targetAngle = digitInt * 18;
// 确保角度不会超过舵机物理极限
if (targetAngle < 5) targetAngle = 5;
Serial.print("Moving to: ");
Serial.println(targetAngle);
myServo.write(targetAngle); // 旋转到目标角度
delay(1200);
myServo.write(5); // 统一回到安全位 5 度
delay(1000);
myServo.detach(); // 动作结束,切断信号,消除所有噪音
Serial.println("Action Finished & Detached.");
// 等待按钮松开
while (digitalRead(BTN_PIN) == LOW) { delay(10); }
} else {
// 未识别到数字时的错误提示
digitalWrite(BUZ_PIN, HIGH);
delay(50);
digitalWrite(BUZ_PIN, LOW);
}
}
// --- 第三部分:屏幕显示刷新 ---
u8g2.clearBuffer();
u8g2.drawFrame(0, 0, 128, 64); // 画个外边框
u8g2.setFont(u8g2_font_6x12_tr);
u8g2.drawStr(5, 15, "AI Digit Recognizer");
u8g2.setFont(u8g2_font_helvB24_tr);
int w = u8g2.getStrWidth(currentDigit.c_str());
u8g2.drawStr((128 - w) / 2, 52, currentDigit.c_str()); // 居中显示数字
u8g2.sendBuffer();
delay(20);
}python最终源码
import tkinter as tk
from PIL import Image, ImageDraw, ImageOps
import torch
import torch.nn as nn
import torch.nn.functional as F
import torchvision.transforms as transforms
import serial # 导入串口库
import time
# --- 1. 必须保留和训练时一致的模型类 ---
class UltimateCNN(nn.Module):
def __init__(self):
super(UltimateCNN, self).__init__()
self.conv1 = nn.Conv2d(1, 32, kernel_size=3, padding=1)
self.bn1 = nn.BatchNorm2d(32)
self.conv2 = nn.Conv2d(32, 32, kernel_size=3, padding=1)
self.bn2 = nn.BatchNorm2d(32)
self.conv3 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
self.bn3 = nn.BatchNorm2d(64)
self.pool = nn.MaxPool2d(2, 2)
self.dropout = nn.Dropout(0.3)
self.fc1 = nn.Linear(64 * 7 * 7, 256)
self.fc2 = nn.Linear(256, 10)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = self.pool(F.relu(self.bn2(self.conv2(x))))
x = self.dropout(x)
x = self.pool(F.relu(self.bn3(self.conv3(x))))
x = self.dropout(x)
x = x.view(-1, 64 * 7 * 7)
x = F.relu(self.fc1(x))
x = self.dropout(x)
x = self.fc2(x)
return x
# 加载模型
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = UltimateCNN().to(device)
try:
model.load_state_dict(torch.load("mnist_model.pth", map_location=device))
model.eval()
except:
print("错误:未找到模型文件 mnist_model.pth")
class DigitApp:
def __init__(self, root):
self.root = root
self.root.title("AI 手写识别 - ESP32 同步版")
# --- 【核心修改】初始化串口 ---
# 请将 'COM3' 改为你设备管理器中看到的端口号
try:
self.ser = serial.Serial('COM3', 115200, timeout=1)
time.sleep(2) # 等待串口稳定
print("连接 ESP32 成功!")
except Exception as e:
self.ser = None
print(f"串口连接失败: {e}。请检查端口号并在代码中修改。")
self.canvas = tk.Canvas(root, width=280, height=280, bg="white", cursor="pencil")
self.canvas.pack(pady=10)
self.label = tk.Label(root, text="请在白色区域书写", font=("微软雅黑", 16))
self.label.pack()
self.image = Image.new("L", (280, 280), 255)
self.draw = ImageDraw.Draw(self.image)
self.canvas.bind("<B1-Motion>", self.paint)
btn_frame = tk.Frame(root)
btn_frame.pack(pady=10)
tk.Button(btn_frame, text="重置", command=self.clear, width=10).pack(side=tk.LEFT, padx=5)
tk.Button(btn_frame, text="AI识别", command=self.predict, width=12, bg="#FF6700", fg="white").pack(side=tk.LEFT, padx=5)
def paint(self, event):
r = 10 # 笔触稍微加粗,识别更准
x1, y1 = (event.x - r), (event.y - r)
x2, y2 = (event.x + r), (event.y + r)
self.canvas.create_oval(x1, y1, x2, y2, fill="black", outline="black")
self.draw.ellipse([x1, y1, x2, y2], fill=0)
def clear(self):
self.canvas.delete("all")
self.image = Image.new("L", (280, 280), 255)
self.draw = ImageDraw.Draw(self.image)
self.label.config(text="请在白色区域书写")
# 清除时给 ESP32 发送一个信号,显示问号或空白
if self.ser:
self.ser.write("?\n".encode())
def predict(self):
bbox = self.image.getbbox()
if bbox and (bbox[2] - bbox[0] > 5):
digit_crop = self.image.crop(bbox)
w, h = digit_crop.size
size = max(w, h) + 60
new_img = Image.new("L", (size, size), 255)
new_img.paste(digit_crop, ((size - w) // 2, (size - h) // 2))
img = new_img.resize((28, 28), resample=Image.LANCZOS)
else:
img = self.image.resize((28, 28), resample=Image.LANCZOS)
img = ImageOps.invert(img)
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])
img_tensor = transform(img).unsqueeze(0).to(device)
with torch.no_grad():
output = model(img_tensor)
prediction = torch.argmax(output, dim=1).item()
prob = F.softmax(output, dim=1)
conf = torch.max(prob).item() * 100
result_text = f"AI识别结果: {prediction} ({conf:.1f}%)"
self.label.config(text=result_text)
# --- 【核心修改】将结果通过串口发给 ESP32 ---
if self.ser:
# 发送字符串格式,例如 "5\n"
send_data = f"{prediction}\n"
self.ser.write(send_data.encode())
print(f"已传送到屏幕: {prediction}")
if __name__ == "__main__":
root = tk.Tk()
app = DigitApp(root)
# 窗口关闭时关闭串口
def on_closing():
if app.ser:
app.ser.close()
root.destroy()
root.protocol("WM_DELETE_WINDOW", on_closing)
root.mainloop()搞定了
这个项目完成

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 14
14 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)