无人机地面站之第14章 飞行监控与实时数据显示
第14章 飞行监控与实时数据显示
Mission Planner 的“飞行数据”(Flight Data)页面是无人机飞行时最核心的监控界面。它将飞控实时上传的数百个遥测数据以直观的仪表、地图、曲线和消息的形式呈现给飞手或调试人员,帮助实时判断飞行状态、诊断异常,并为后续的日志分析提供原始数据参照。
14.1 HUD 仪表解读
HUD(Head-Up Display)是 Mission Planner 飞行数据页面左侧上方的仪表区域,模拟飞机驾驶舱的抬头显示器风格,以图形和数字的形式集中展示飞行器的关键姿态与导航信息。
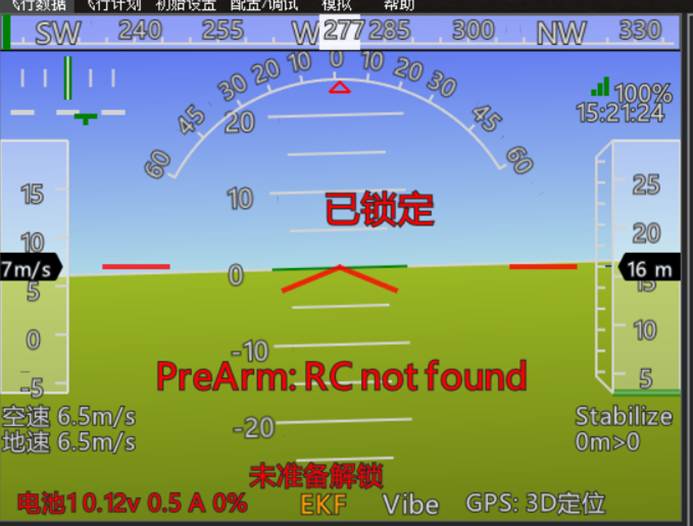
14.1.1 姿态方向球(人工地平仪)
姿态球是 HUD 中最显眼的元素,它模拟飞机的“人工地平仪”(Artificial Horizon):
- 蓝色区域:代表天空。
- 棕色/绿色区域:代表地面。
- 白色水平线:代表地平线。
- 黄色箭头/十字线:代表飞行器的当前横滚(Roll)和俯仰(Pitch)角度。
当飞行器水平悬停时,黄色十字线位于姿态球中心。当飞行器向右横滚时,黄色十字线向左移动(相对地面参照系)。俯仰同理,抬头时十字线下移,低头时上移。姿态球边缘还会显示刻度,帮助量化姿态角的数值(横滚/俯仰范围通常 ±90°)。
应用场景:在飞行中,若姿态球剧烈晃动或长时间偏离中心(非人为操控),可能表示 PID 增益过高、振动过大或传感器异常。
14.1.2 空速 / 地速
- 空速(AS) :飞行器相对于周围空气的速度,单位 m/s 或 km/h。注意:多旋翼通常不安装空速计,此时该值显示为 0 或无意义。固定翼飞行器必看。
- 地速(GS) :飞行器相对于地面的水平速度,由 GPS 计算得出,单位 m/s 或 km/h。
对于四旋翼,地速是最直观的漂移指标。在 Loiter 模式下,地速应接近 0(无风或位置锁定时)。若地速持续不为零,说明定点性能差或存在风扰动。
14.1.3 高度与升降速度
- 海拔高度(Alt, MSL) :基于气压计(或 GPS 高程)计算的平均海平面高度。单位米。起飞前会记录地面气压值作为归零点,所以显示的高度通常约等于相对起飞高度。
- 相对起飞点高度(Relative Alt) :在 HUD 中有时替代显示,即飞行器离起飞点的垂直距离。
- 升降速度(VSI, Vertical Speed Indicator) :垂直方向上的变化速率,单位 m/s。向上为正,向下为负。悬停时应接近 0,上升/下降时数值随杆量变化。
注意事项:气压计高度受气温、气流影响会有缓慢漂移(每小时数米至十米)。长航时飞行时,建议启用 GPS 高度校正(EK3_OGN_HGT_MASK=5)来抑制漂移。
14.1.4 电池状态
电池状态区域显示以下关键参数:
|
字段 |
含义 |
典型正常值 |
|
电池电压(V) |
当前总电压(对于 4S 锂聚合物电池,满电 16.8V,报警阈值约 14.0V) |
视电池串联数而定 |
|
电流(A) |
瞬时电流消耗(悬停时通常 10–30A,依机架和负载) |
视机架而定 |
|
消耗电量(mAh) |
从解锁开始累计的电池容量消耗 |
不应超过电池标称容量的 80% |
|
剩余电量百分比(%) |
基于累计消耗与电池容量计算的剩余容量 |
报警一般设为 20–30% |
当电池电压低于 BATT_LOW_VOLT 或剩余容量低于 BATT_LOW_MAH 时,飞控会触发低电量故障保护(如闪烁 LED、发送警告、自动返航)。
14.1.5 GPS 状态栏
位于 HUD 正下方,显示:
- GPS 定位类型:No GPS, 2D Fix, 3D Fix, RTK Float, RTK Fixed 等。
- 卫星数量(sats):当前用于定位解算的卫星数。≥10 较理想,<6 不可用于 Loiter。
- HDOP(水平精度因子) :数值越小精度越高,<1.0 为优秀,>2.0 应谨慎使用 GPS 模式。
14.1.6 其他重要指示
- EKF 方差:HUD 右上角或下方常显示 EKF 数值,代表扩展卡尔曼滤波器的估计方差(0–1,>0.6 表示异常)。如果该值持续高于 0.8,说明传感器融合出现问题(振动过大、GPS 丢失、罗盘干扰等),飞控可能会触发 EKF Failsafe。
- 飞行模式:HUD 顶部显示当前飞行模式(如 Loiter, AltHold, Stabilize),以及解锁状态(Armed / Disarmed)。
- 遥测信号强度:若使用数传电台,会显示 RSSI(接收信号强度指示)或 Remote RSSI,数值越高表示链路质量越好。
14.2 飞行数据页面布局与定制
14.2.1 地图视图
“飞行数据”页面的右半部分是地图视图,基于 OpenStreetMap、Bing 等在线地图源,显示飞行器的实时位置、飞行轨迹、航点任务等。
主要功能:
- 飞行器图标:带有航向箭头的四旋翼图标,指示当前位置和机头朝向。
- 轨迹线:飞行路径的连线,颜色随高度变化(默认绿色低、红色高)。
- 航点任务显示:如果已上传任务,地图上会显示每个航点的编号和连线。
- 地理围栏(Fence) :以半透明红色区域显示禁飞区,若飞行器接近边界则触发警告。
- 地图操作:鼠标滚轮缩放,左键拖拽平移,右键菜单可快速添加航点或回家。
14.2.2 遥测数据显示(状态面板)
飞行数据页面右侧(地图下方或侧边)通常有一个可收缩的“状态”面板,列出飞控实时上传的数百个遥测参数。您可以在状态栏上方搜索关键词,快速定位所需参数,例如:
- gps0.satellites_visible:卫星数
- gps0.hdop:HDOP 数值
- ekf3.vibe:振动水平(三轴综合)
- compass.primary:当前使用的罗盘编号
- rcin.ch3:油门通道输入值
技巧:右键点击任意状态参数,可以将其添加到“快速面板”(Quick)中,方便持续监控。
14.2.3 状态栏定制
屏幕底部的状态栏(显示如“PreArm: GPS not healthy”等信息)是飞控对当前系统健康度的直接总结。您无法直接删除状态栏中的消息,但可以通过修改 ARMING_CHECK 参数(取消某些预检)来减少某些报错。然而,强烈建议保留所有预检,仅在明确了解风险时关闭特定检查。
此外,Mission Planner 的“状态”页面中,您可以使用 Ctrl+F 打开高级调试工具,选择 “MAVLink Inspector” 来查看未经处理的原始 MAVLink 消息(如 GPS_RAW_INT, SCALED_PRESSURE, ATTITUDE 等),这在诊断传感器通信故障时非常有用。
14.3 快速面板(Quick)的配置与使用

快速面板是飞行数据页面中间区域的一组可自定义的数值显示框,默认显示 6 个(可右键增加至 9 或 12 个)。它可以实时显示您最关心的飞控参数,无需每次去“状态”面板翻找。
14.3.1 添加/修改参数项
- 在快速面板区域 右键单击,选择菜单中的 “设置显示数量”(如 6、9、12 个格子),以增加或减少显示框数量。
- 双击 任意一个空白的格子,弹出“添加参数”窗口。
- 在输入框中输入您要监控的参数全名,例如:
- gps0.satellites_visible(卫星数)
- gps0.hdop(HDOP)
- ekf3.vibe(振动)
- arming.is_armed(解锁状态,0/1)
- rcin.ch3(油门原始值)
- 点击 OK,该参数就会实时显示在格子中。
14.3.2 常用快速面板参数推荐
对于四旋翼调试和飞行,建议将以下参数配置在快速面板中:
|
参数名 |
说明 |
正常范围 |
|
gps0.satellites_visible |
GPS 卫星数 |
≥10 |
|
gps0.hdop |
水平精度因子 |
<1.5 |
|
ekf3.vibe |
振动水平(三轴 RMS 和) |
<0.3 |
|
ekf3.yaw |
偏航角(度) |
随实际机头 |
|
compass.primary |
主罗盘编号 |
应为外置罗盘(如 2 或 3) |
|
battery.voltage |
电池电压 |
视串联数而定 |
|
arming.is_armed |
解锁状态 |
0/1 |
|
ekf3.pos_horiz |
水平位置估计方差 |
<0.5 |
14.3.3 管理快速面板
- 删除:双击已有参数的格子,清空输入框并确定,即可删除。
- 移动:右键 → “允许拖动”,然后用鼠标拖拽格子重新排列。
- 导出/导入:右键 → “导出快速面板”,可以将当前配置保存为 .xml 文件,方便在另一台电脑上导入。
14.4 消息与通知区域解读
在飞行数据页面右侧(状态面板上方或旁边)有一个“消息”选项卡,里面按时间顺序记录了飞控发送的所有 STATUSTEXT MAVLink 消息,以及地面站本身产生的通知。
14.4.1 消息等级与颜色
- 绿色:正常信息(如 Armed, Disarmed, Mode changed to Loiter)。
- 橙色/黄色:警告(如 PreArm: GPS not healthy, EKF variance high)。
- 红色:严重错误或故障保护触发(如 EKF Failsafe!, Battery critical low)。
14.4.2 常见消息及含义
|
消息示例 |
含义 |
应对措施 |
|
PreArm: GPS not healthy |
解锁前检查失败,GPS 未就绪 |
等待卫星数增加或检查 GPS 接线 |
|
EKF3 IMU1 is unhealthy |
主 IMU 故障 |
降落检查,可能需要更换 IMU |
|
Battery low: landed |
电池电量低,已自动降落 |
更换电池 |
|
Throttle failsafe on |
遥控器油门信号丢失 |
检查遥控器与接收机 |
|
GPS Glitch: pos error > 25m |
GPS 位置跳变超过阈值 |
可能受干扰,注意飞行器漂移 |
14.4.3 清空与保存消息
- 点击消息区域右上角的 “Clear” 按钮可以清空当前消息列表(仅清除地面站显示,不删除飞控日志)。
- 右键消息区域,可以选择 “Save to file” 将所有消息导出为文本文件,用于事后分析。
14.5 日志查看与实时曲线
Mission Planner 提供了强大的日志分析功能,既可以实时查看某些数据的曲线,也可以事后回顾飞行日志(.bin 或 .log 文件)。
14.5.1 实时曲线(Graph This)
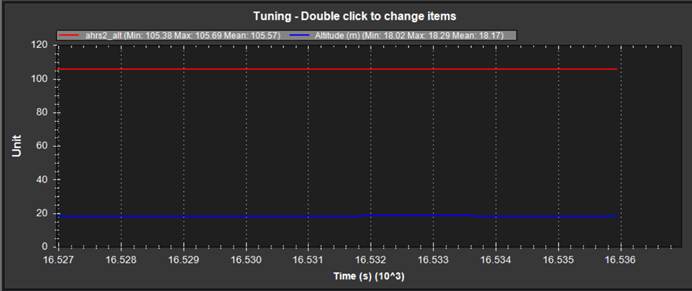
在较早版本的 Mission Planner 中,实时曲线功能需要通过 Ctrl+F → “状态曲线(Status Graph)” 打开。但在当前主流版本(如 1.3.83 及以上)中,该功能已经迁移到 “飞行数据”页面 的 Tuning 面板,名称也变为 “Graph This”。新入口不仅位置更直观,而且支持多曲线、独立纵轴、实时缩放等更丰富的操作。
打开 Graph This 的步骤
在 Mission Planner 顶部点击 “飞行数据”。
在右侧地图的正下方,找到 “Tuning” 复选框,将其勾选。
如果没有看到该复选框,请将 Mission Planner 窗口水平拉宽,或调整界面缩放比例(Ctrl + 鼠标滚轮)。
勾选后,屏幕右下方会弹出一个新的图表窗口(默认显示一些基础数据)。
双击该图表窗口的任意位置,会弹出 “Graph This” 配置对话框。
至此,您已经打开了实时曲线工具。下面介绍如何使用。
添加参数
在 “Graph This” 对话框左侧,列出了飞控实时上传的所有遥测参数(按类别分组,如 ATT 姿态、GPS 全球定位系统、CTUN 控制油门等)。
添加单个参数:在左侧列表中勾选您要监控的参数(例如 GPS.HDOP、ATT.Pitch、CTUN.Alt)。参数会立即出现在右侧的曲线图中。
移除参数:取消勾选即可。
搜索参数:对话框顶部有搜索框,可以输入关键词(如 hdop、vibe)快速定位。
曲线窗口操作
缩放与平移:用鼠标滚轮可以缩放时间轴;按住鼠标左键拖拽可以平移曲线视图。
查看精确数值:将鼠标悬停在曲线上某一点,会弹出该时刻的数值提示。
清空所有曲线:点击曲线窗口右上角的 “Clear” 按钮。
高级功能:独立纵轴(Y 轴)
不同参数的量纲和数值范围差异很大(例如高度以米为单位,变化范围 0–100;角速度以度/秒为单位,变化范围 -50–50)。如果将它们混在同一纵轴上,小数值的曲线会难以辨认。
解决方法:为数值差异大的参数分配独立的右侧 Y 轴。
在曲线窗口的图例区域(通常是窗口顶部或左侧,显示每条曲线的颜色和名称),右键单击您想要分离的参数名称。
在弹出的菜单中,选择 “放在右侧 Y 轴”(Move to right Y axis)。
该参数的曲线将使用右侧纵轴缩放,与左侧纵轴参数互不干扰。
典型应用场景
监控目的 推荐参数 预期曲线特征
振动水平 EKF3.Vibe(或 IMU.AccX/AccY/AccZ) 悬停时平稳 <0.3;过高表示螺旋桨/电机不平衡
GPS 定位质量 GPS.HDOP、GPS.Sats HDOP <1.5 且卫星数 ≥10 为佳
高度控制性能 CTUN.Alt(实际高度)、CTUN.DAlt(目标高度) 两条曲线应基本重合,超调量小
电池状态 BAT.Volt、BAT.Curr、BAT.Remain 电压缓慢下降,电流随油门变化,剩余容量线性减少
EKF 健康度 EKF3.PosHoriz(水平位置方差)、EKF3.VelHoriz(水平速度方差) 方差应 <0.5,持续上升表示传感器融合异常
保存与导出曲线数据
保存为图片:在曲线窗口中右键 → “Save Graph as PNG”,可以将当前视图保存为图片文件,便于记录或分享。
导出数据:右键 → “Export CSV”,可以将当前窗口时间范围内的所有曲线数据导出为 CSV 文件,供 Excel 或 MATLAB 进一步分析。
📌 与飞行日志的关系:Graph This 提供的是实时曲线,适合在调试飞行中即时观察。如果您需要事后对整段飞行进行精细分析(例如长达 30 分钟的日志),应使用 14.5.2 节 介绍的“飞行日志回顾”功能,它可以加载已保存的 .bin 或 .log 文件,支持任意缩放、多参数组合分析,并且不会受遥测链路断连的影响。
补充说明:MAVLink Inspector(替代旧“状态曲线”的另一种选择)
如果您只需要临时查看某个原始数据的最新值而不需要绘制历史曲线,可以使用 Ctrl+F → “MAVLink Inspector”。该工具以树形结构展示飞控发出的所有 MAVLink 消息(如 GPS_RAW_INT、SCALED_PRESSURE、ATTITUDE 等),双击消息可展开字段,数值会实时刷新。这在快速验证传感器是否正常工作时非常高效,但不适合观察变化趋势。
操作路径:飞行数据 → 按 Ctrl+F → 在弹出的窗口中找到 MAVLink Inspector 按钮(通常在窗口上半部分)→ 点击打开。
14.5.2 飞行日志回顾
在“飞行数据”页面,点击左侧的 “回顾日志”(Log Analyze)或 “日志浏览”(Browse Log),即可打开日志分析工具。
- 下载日志:点击“下载数据日志”(Download DataFlash Log),选择要下载的日志文件(以时间戳命名)。日志存储在飞控 SD 卡中,可通过 USB 或数传下载。
- 加载日志:下载完成后,日志会自动出现在列表中,双击即可加载。
- 分析曲线:左侧参数列表选择需要分析的参数(如 GPS.HDOP、IMU.AccX、CTUN.Alt),点击“画图”按钮即可生成曲线。常用分析项目包括:
- 高度与油门:检查定高模式下的高度保持性能和油门响应。
- 振动分析:绘制 IMU 加速度计原始数据,判断是否存在高频振动(通常来自螺旋桨或电机动平衡)。
- EKF 创新序列:查看 NKF3.IPD 等参数,判断传感器融合是否异常。
- 电池电压与电流:评估续航和电池健康状态。
日志分析技巧:
- 使用 “快速曲线” 按钮,可以一键绘制常用参数(姿态、高度、GPS 状态等)。
- 右键点击曲线图,可以导出数据为 CSV 文件,进一步用 Excel 或 MATLAB 分析。
- 若日志中 EKF 标志位 NKF3.Flt 非零,说明 EKF 检测到故障,应优先检查该时间点附近的传感器数据。
14.5.3 MAVLink Inspector(实时查看原始 MAVLink 消息)
在 Ctrl+F 高级调试窗口中,还有 “MAVLink Inspector” 工具。它显示飞控通过 MAVLink 协议发出的所有原始消息结构,包括 GPS_RAW_INT、SCALED_PRESSURE、ATTITUDE、VFR_HUD 等。此工具对于验证传感器数据是否被正确发送至地面站非常有用。
使用场景:当 HUD 显示某个数值异常时(如气压高度跳变),可以在 MAVLink Inspector 中找到对应的消息,查看飞控发出的原始值是否已经异常,从而判断是传感器问题还是地面站解析问题。
14.6 本章小结
Mission Planner 的“飞行数据”页面是连接飞手/开发者与飞控的实时窗口。通过 HUD 仪表、地图视图、快速面板、消息区域和日志分析工具,您可以全方位监控四旋翼的飞行状态,及时发现振动、定位漂移、电池欠压、传感器故障等问题,并为事后的精准调参与故障排查提供数据支撑。
熟练掌握本章内容后,您将能够:
- 快速解读 HUD 仪表上的姿态、速度、高度、电池、GPS 等信息。
- 自定义快速面板,实时监控最关心的飞控参数。
- 通过消息区域和状态栏快速定位解锁失败或飞行异常的原因。
- 利用实时曲线和飞行日志,对飞控性能进行定量的分析与验证。

智能硬件社区聚焦AI智能硬件技术生态,汇聚嵌入式AI、物联网硬件开发者,打造交流分享平台,同步全国赛事资讯、开展 OPC 核心人才招募,助力技术落地与开发者成长。
更多推荐
 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)